机载小型化中波红外连续变焦光学系统设计
2021-12-23吴海清王玮超
吴海清,王玮超
机载小型化中波红外连续变焦光学系统设计
吴海清1,王玮超2
(1. 凯迈(洛阳)测控有限公司,河南 洛阳 471009;2. 洛阳建工集团有限公司,河南 洛阳 471009)
为适应机载光电系统对红外热像仪光学系统小型化、轻量化的要求,采用前端无焦扩展倍镜与后端连续变焦光学系统组合的方式,实现了30~660mm的22倍连续变焦光学系统。该系统的光学总长为244mm,总长/最大焦距比为0.37,系统具有光学总长小、变倍比大的特点,适用于远距离目标探测的大型机载光电吊舱系统中。将前端无焦扩展倍镜去掉后,后端连续变焦光学系统可以实现15~330mm的22倍连续变焦光学系统,该系统的光学总长为138mm,总长/最大焦距比为0.42,可作为独立的连续变焦系统应用于近距离目标探测的中小型机载光电吊舱系统中。设计结果显示,该系统在两种状态下均成像良好,在探测器对应的特征频率331p/mm处,中心视场的MTF值均在0.3附近,接近衍射极限,0.7视场的MTF值均在0.2附近,边缘视场的MTF均在0.15附近,能够满足应用需求。
小型化;光学设计;连续变焦系统;中波红外
0 引言
由于红外成像是由物体自身辐射的红外线经过成像系统后完成成像观察的,而热辐射与物体的温度有关。因此,红外成像可以实现白天及夜间的全天时成像,具有全天候目标探测、识别的能力,此外由于其属于被动成像,具有不易被干扰、识别伪装能力强等优点,在直升机、固定翼飞机、无人机等机载光电系统中装载红外成像系统用于完成战场态势感知、目标搜索、跟踪、探测及识别以及武器引导与打击效果评估等作战任务,已成为光电系统的标准配置之一[1-3]。
定焦红外成像光学系统的焦距固定,难以满足对不同距离处目标的探测、识别要求。连续变焦红外光学系统在短焦状态下视场大,其成像收容面积大;在长焦状态下视场小,其成像分辨率高。应用在机载光电系统中,大视场可用于大范围的目标搜索,小视场可用于对目标进行详查与识别、跟踪及瞄准。此外,由于连续变焦成像系统在进行焦距变化时始终保持对目标清晰成像,因此,在对目标进行跟踪或瞄准时,可根据观察需要进行焦距调整,选择合适的观察视场,并且在视场切换过程中能够保持对目标的稳定跟踪而不丢失,从而有效提高了人机功效[4-6]。
本文采用前端无焦扩展倍镜与后端连续变焦光学系统组合的方式,增加倍镜后实现了30~660mm的22倍连续变焦光学系统,将前端无焦扩展倍镜去掉后,后端连续变焦光学系统可实现15~330mm的22倍连续变焦光学系统。
1 设计指标
文中针对目前广泛应用的640×512元制冷型红外探测器进行连续变焦光学系统的设计,探测器像元尺寸为15mm×15mm,响应波段为3.7~4.8mm,光学系统设计参数如表1所示。
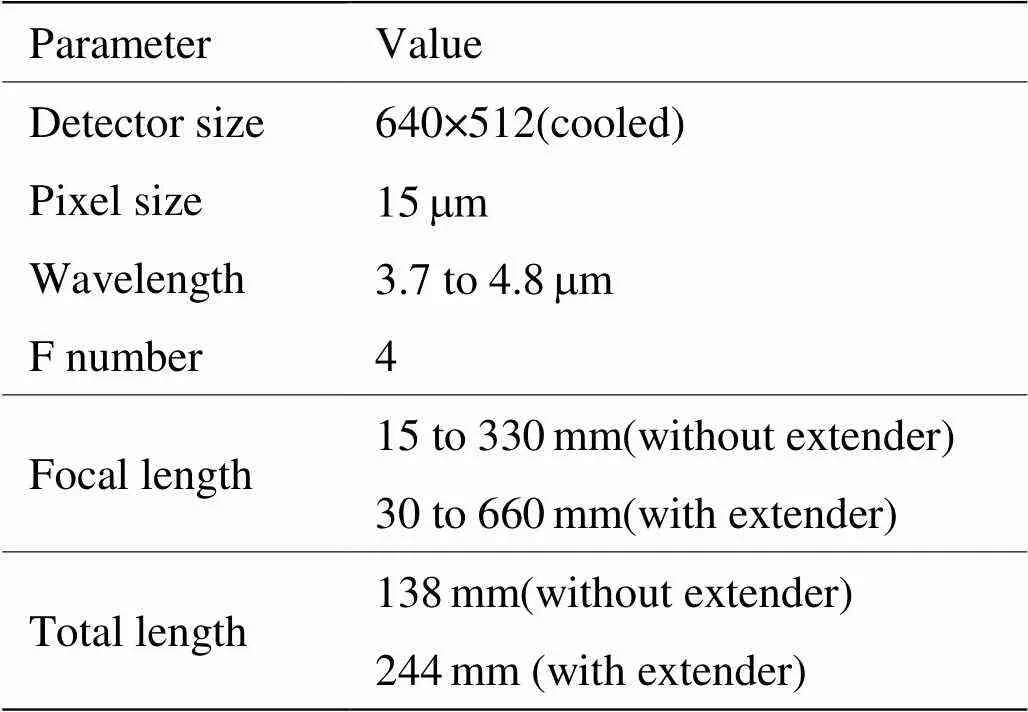
表1 光学系统技术指标
2 设计思路
图1所示为光学系统的组成图,采用前端无焦扩展倍镜与后端连续变焦光学系统组合设置的方式,两部分独立进行设计,后端连续变焦光学系统采用三组元机械补偿式结构型式,有效缩短了光学系统长度,实现小型化设计。前端为2´无焦望远镜,用来扩展光学系统焦距,在设计时,前端望远系统的出瞳与后端连续变焦系统的入瞳相互匹配。前端扩展倍镜将后端连续变焦光学系统的焦距增加为原来的2倍,实现长焦化,适用于远距离目标探测的大型机载光电吊舱系统中。将前端无焦扩展倍镜去掉后,后端连续变焦光学系统可作为独立的连续变焦系统用于近距离目标探测的中小型机载光电吊舱系统中。

图1 连续变焦光学系统组成
图2为后端连续变焦系统的光学原理图,其中1为前固定组,2为变倍组,3为补偿组,4为后固定组。
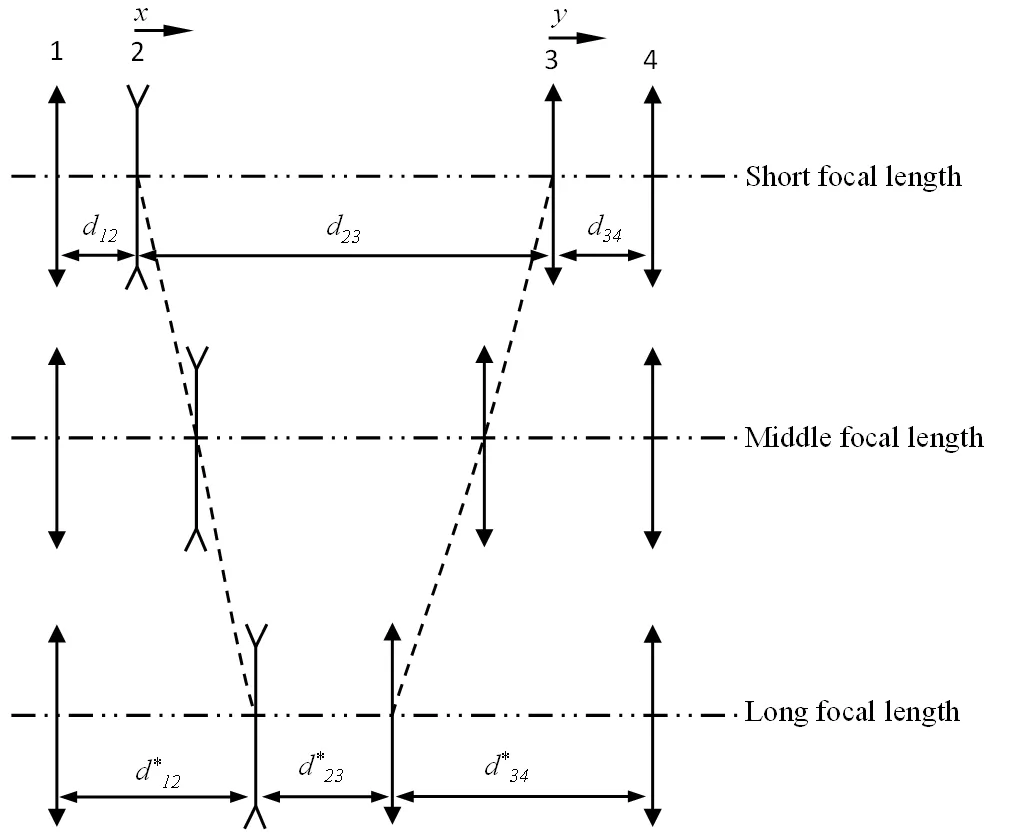
图2 机械正组补偿连续变焦原理图
系统的变倍比为[7]:
式中:2、3分别为第2、3组元的初始放大率;*2、*3分别为第2、3组元变焦移动后的倍率。
变倍组与补偿组的初始放大率分别为:

式中:1¢、2¢、3¢分别为第1、2、3组元的焦距;12为第1、2组元之间的初始间隔;23为第2、3组元之间的初始间隔。
变倍组与补偿组变焦移动后的倍率分别为:
变倍组的移动量:
补偿组的移动量:
各组元之间的间隔为:
12*=12+(8)
23*=23-+>0 (9)
34*=34-(10)

以短焦为起始位置,给定归一化值:2¢=-1,设计时,补偿组的焦距不宜过长或过短,过长时补偿像面位移需要的补偿量太大,不利于实现小型化设计,过短时补偿组负担的相对孔径太大,像差校正困难,补偿组焦距一般为变倍组焦距的3倍左右,取3¢=3。由于最短焦时,变倍组与前固定组之间的间隔最近,12的选取保证镜片互不相碰且留有一部分余量即可,取12=0.5。设短焦时23=6,根据公式(1)~(9)得出系统在长焦状态下:*12=7.3,*23=0.6,各组元的焦距分别为1¢=11,2¢=-1,3¢=3。
3 设计结果及像质评价
3.1 设计结果
采用机械正组补偿式连续变焦光学结构模型,在建立初始模型并缩放后利用光学设计软件进行优化。由于该系统短焦视场较大,轴外像差和高级像差都比较大。针对高级像差校正,设计引入高次非球面和衍射面,较好地平衡了轴外和轴上像差。采用二次成像结构,系统入瞳距离前镜组较近,因此轴外视场的主光线在前镜组上的投影较低,从而减小前端透镜的口径。此外,光机结构设计时,在一次像面位置处设置视场光阑,使得系统视场外的杂散光不能穿过视场光阑到达像面,可有效降低杂散光对光学系统成像的影响,提高了信噪比。在光学系统出瞳处设置孔径光阑,孔径光阑与制冷探测器的冷光阑一致,系统F数与探测器F数相同,实现100%冷光阑效率,因此,不会出现由于存在光束切割造成能量损失的情况,从而提高了系统灵敏度。
最终设计的光学系统如图3~图6所示,在增加扩展倍镜后,可实现焦距在30~660mm范围内连续变化的22倍连续变焦功能,该系统的光学总长为244mm,总长/最大焦距比为0.37,具有光学总长小、变倍比大的特点;将前端无焦扩展倍镜去掉后,后端连续变焦光学系统可实现焦距在15~330mm范围内连续变化的22倍连续变焦功能,该连续变焦光学系统的光学总长为138mm,总长/最大焦距比为0.42,系统总长短、体积小。
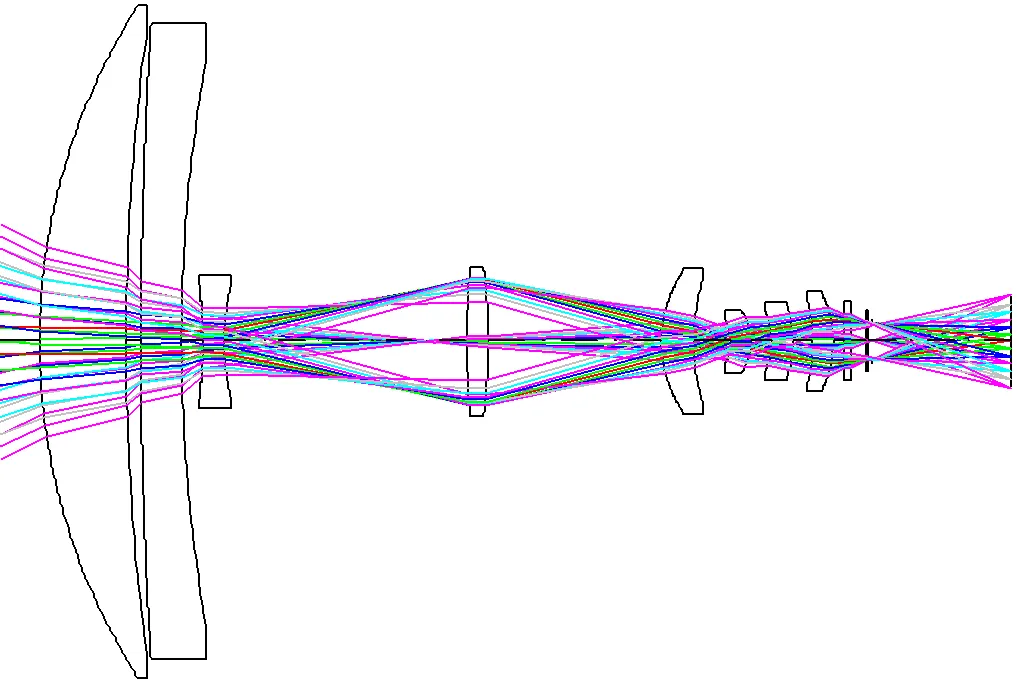
图3 焦距为15mm时的光路图
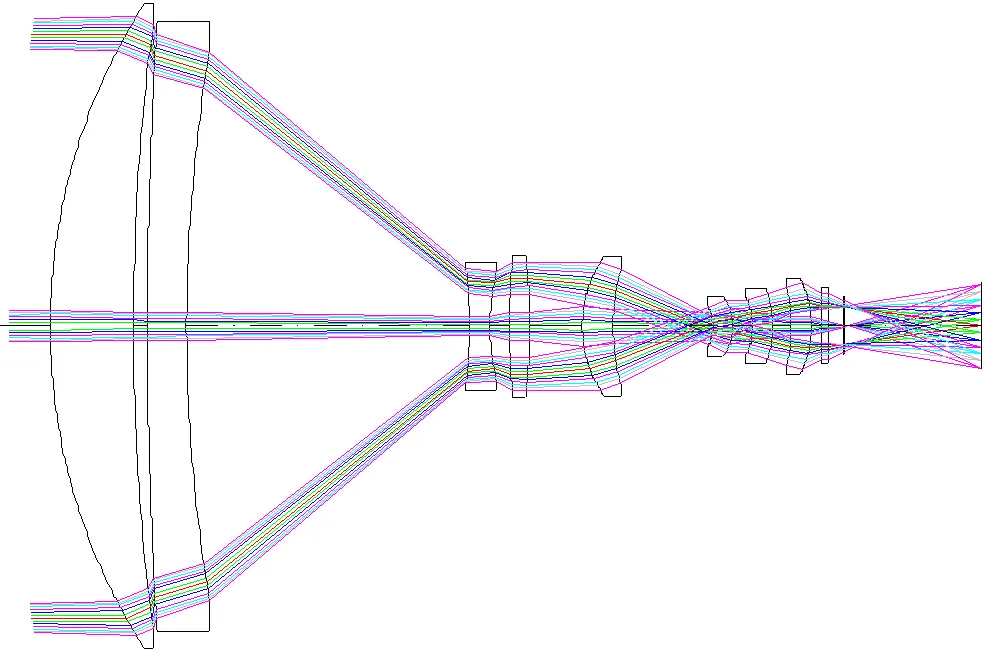
图4 焦距为330mm时的光路图
3.2 像质评价
对于成像光学系统,光学调制传递函数(modulation transfer function,MTF)是像的调制度与物的调制度之比,它是空间频率的函数,能够表示出在各个频率分量上目标背景经过成像系统后对比度的变化情况。高频、中频以及低频部分分别反映了物体细节传递情况、层次传递情况和轮廓传递情况,是成像光学系统性能判据中最全面的判据。图7、图8为本文光学系统在未增加倍镜的情况下,短焦15mm、长焦330mm时的MTF曲线,由图可见,在640×512制冷探测器对应的特征频率33 lp/mm处,中心视场的MTF值均在0.3附近,接近衍射极限,0.7视场的MTF值均在0.2附近,边缘视场的MTF均在0.15附近,对于机载成像系统,人眼观察的主要区域在视频的0.7视场范围内,该光学系统能够满足应用要求。
图9、图10为本文光学系统在增加倍镜后,短焦30mm、长焦660mm时的MTF曲线,由图可见,在640×512制冷探测器对应的特征频率33lp/mm处,中心视场的MTF值均在0.3附近,接近衍射极限,0.7视场的MTF值均在0.2附近,边缘视场的MTF均在0.15附近,能够满足应用要求。
在几何光学的成像过程中,由于光学系统存在像差,导致由物面上一点发出的光线经过光学系统成像之后,在像面上不再集中于一点,而是形成一个分布在一定范围内的几何像斑,称之为点列图。点列图为像质评价提供了依据,用点列图来评价光学系统的像质是一种方便易行的方法。光学系统的均方根(root mean square,RMS)弥散斑直径是包含大约68%能量的圆的直径,图11、图12为本文光学系统在未增加扩展倍镜的情况下,短焦15mm、长焦330mm时的点列图,由图可见,该系统的RMS弥散斑直径的最大值为20.9mm。该系统的艾里斑直径为2.44×F#=39.04mm,因此,弥散斑直径小于艾里斑直径,满足应用要求。

图5 带增倍镜焦距为30mm时的光路图

图6 带增倍镜焦距为660mm时的光路图
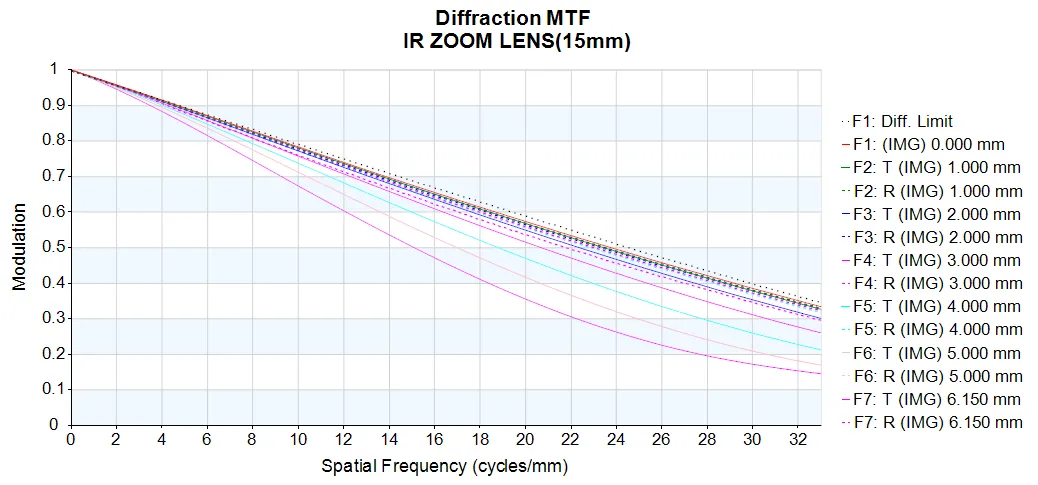
图7 焦距为15mm时的MTF
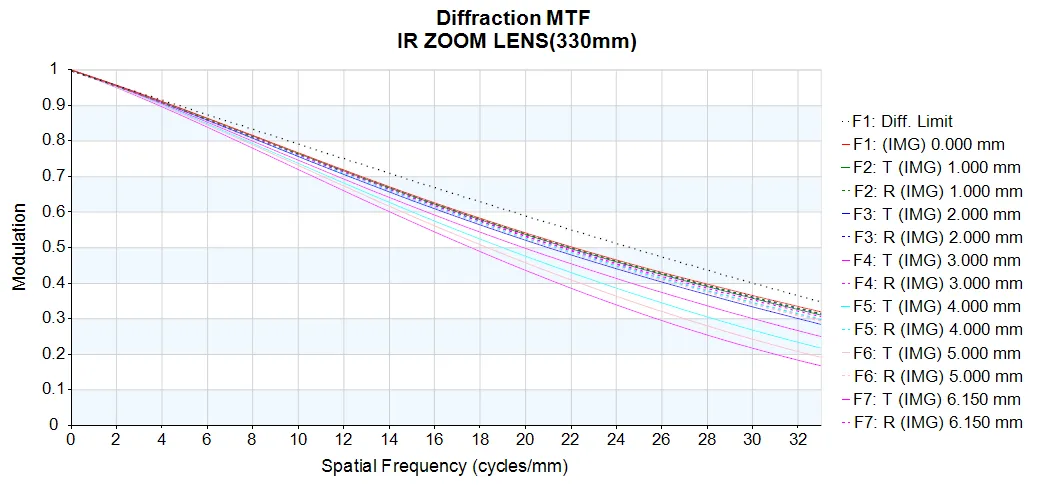
图8 焦距为330mm时的MTF
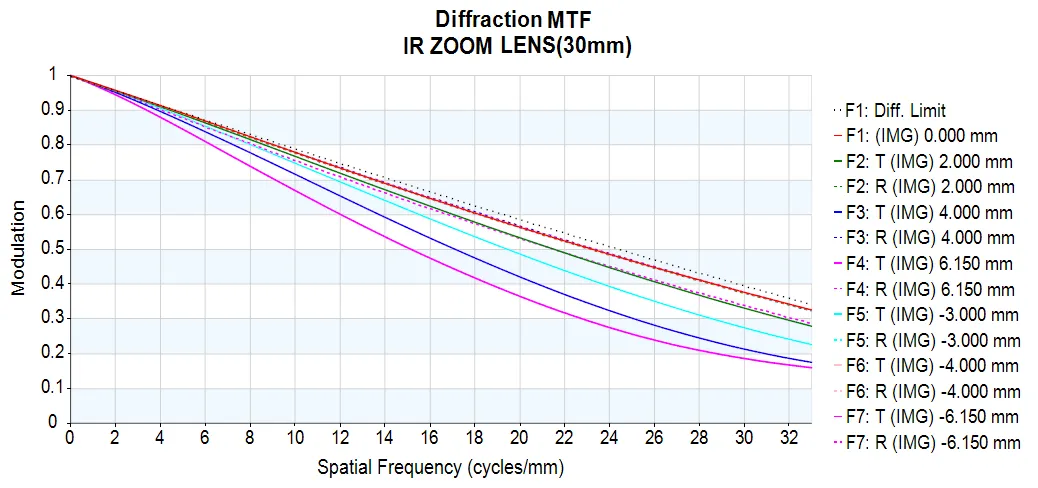
图9 带扩展倍镜焦距为30mm时的MTF
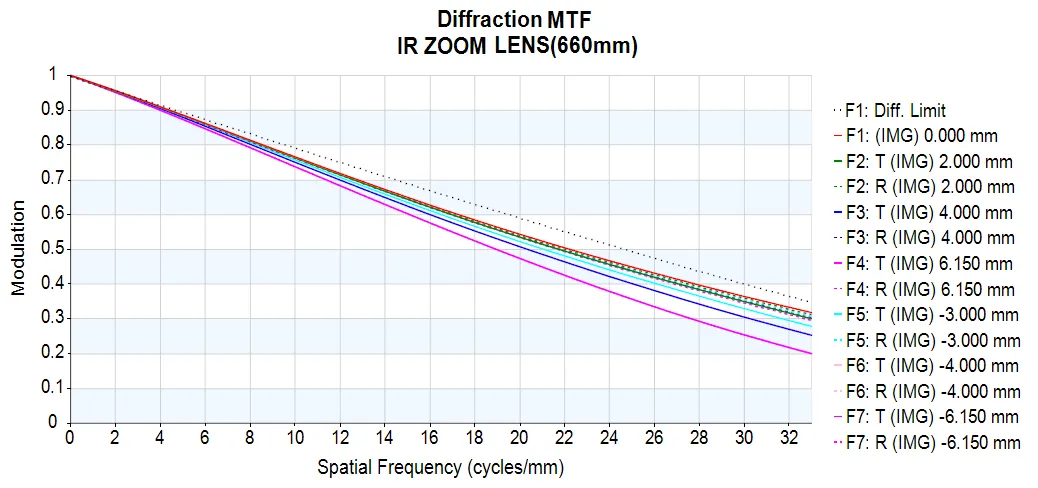
图10 带扩展倍镜焦距为660mm时的MTF
图13、图14为本文光学系统在增加扩展倍镜后,短焦30mm、长焦660mm时的点列图,由图可见,该光学系统RMS弥散斑直径的最大值为23.5mm,小于艾里斑直径39.04mm,满足应用要求。
在连续变焦镜头结构中,通常采用变焦凸轮来带动变倍组与补偿组进行移动,变倍组和补偿组两个透镜组分别装在两个滑架上,每个滑架上固定一个导钉,导钉沿凸轮曲线槽运动。当电机旋转驱动凸轮转动时,两个滑架的导钉便沿着各自的导槽运动,带动变倍组和补偿组沿光轴方向按预定关系移动,从而使得镜头焦距发生改变。该机构具有传动平稳、控制简单、可靠、无跳动、空回小等优点。而变焦凸轮曲线槽是在数控机床中通过变焦曲线数据加工而成,因此,对于连续变焦光学系统,变焦曲线的拟合是连接光学设计与光机结构设计的关键环节。图15为该变焦光学系统变倍组、补偿组的变焦运动曲线图,其中,横坐标为光学系统的焦距,纵坐标为变倍组、补偿组距前固定组的距离。由图可见,该系统在焦距变化过程中变倍组和补偿组的运动均平滑、连续,没有拐点,可有效避免系统在变焦运动过程中出现卡滞现象。
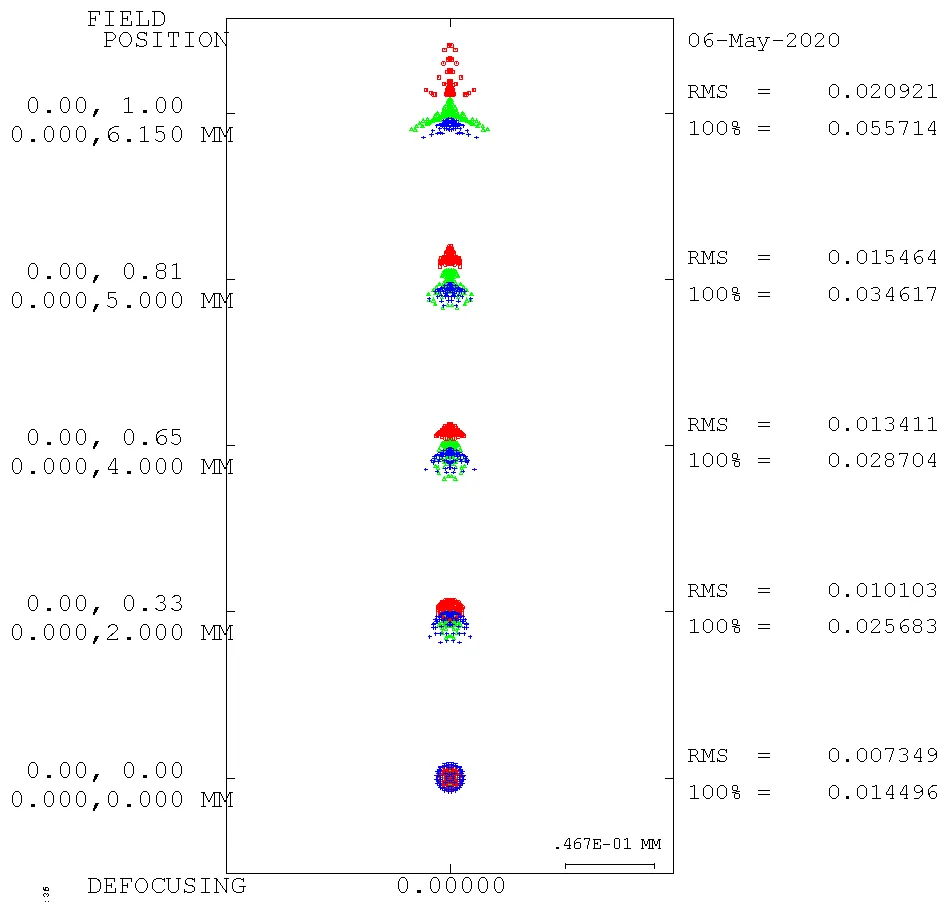
图11 焦距为15mm时的点列图
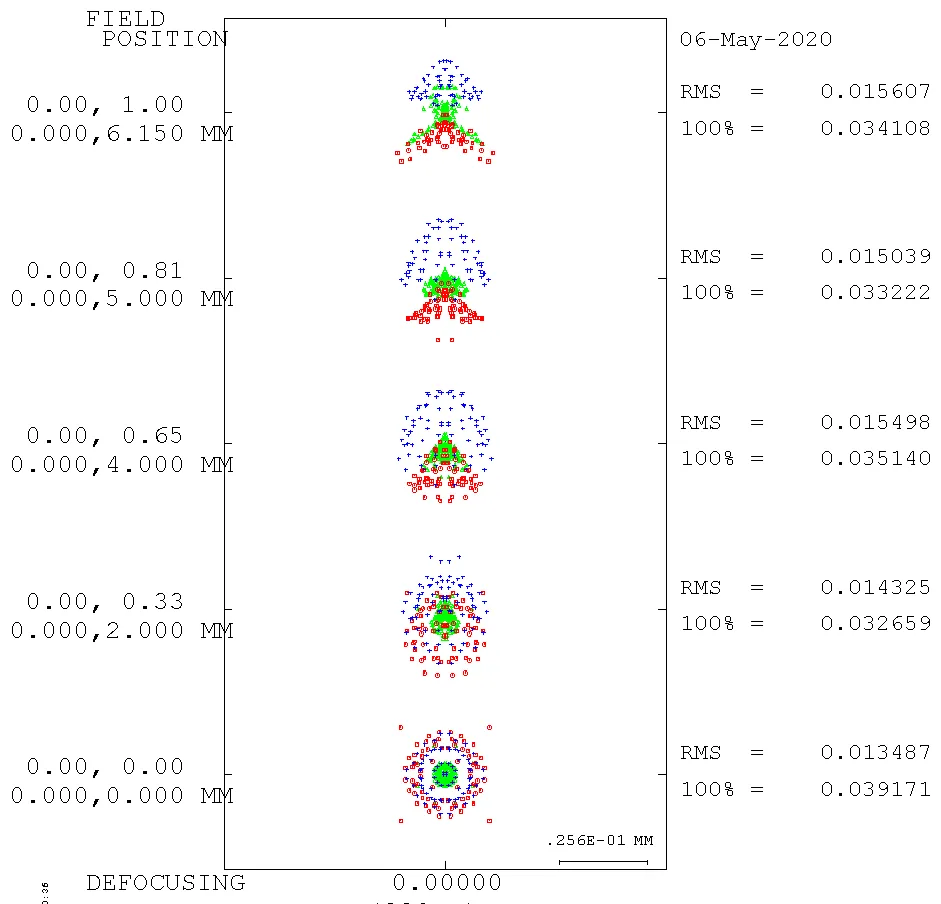
图12 焦距为330mm时的点列图
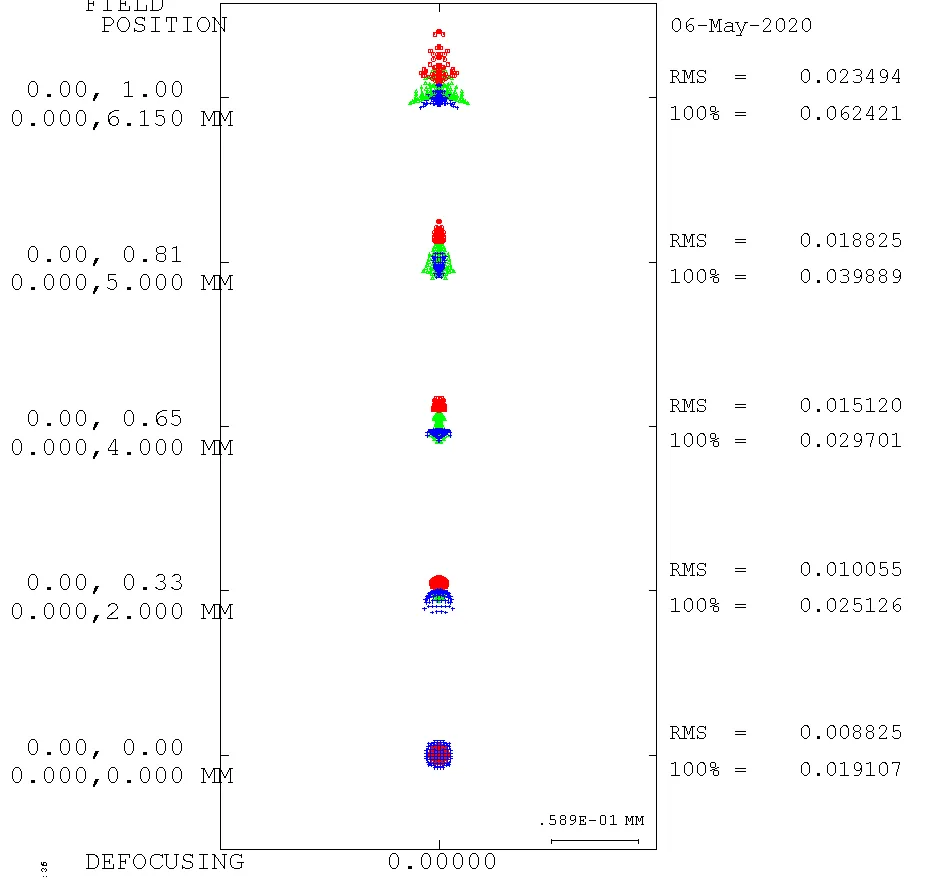
图13 带扩展倍镜焦距为30mm时的点列图

图14 带扩展倍镜焦距为660mm时的点列图

图15 光学系统变倍组、补偿组变焦运动曲线
4 结论
本文采用前端无焦扩展倍镜与后端连续变焦光学系统组合的方式,增加扩展倍镜后实现了30~660mm的22倍连续变焦光学系统,该系统的光学总长为244mm,总长/最大焦距比为0.37,系统结构紧凑,具有光学总长小、变倍比大的特点,适用于远距离目标探测大型机载光电吊舱系统中。将前端无焦扩展倍镜去掉后,后端连续变焦光学系统可实现15~330mm的22倍连续变焦光学系统,该连续变焦光学系统的光学总长为138mm,总长/最大焦距比为0.42,可作为独立的连续变焦系统用于近距离目标探测的中小型机载光电吊舱系统中。根据任务设备的不同需求,可以通过增加或去掉前端扩展倍镜的方式,适应不同光电吊舱对红外连续变焦系统的体积、焦距要求,从而有效缩短系统研制周期,降低技术风险及研制费用,扩大了产品的适用范围,延长了产品寿命周期,在机载光电等领域具有良好的应用前景。
[1] 王岭雪, 蔡毅. 红外成像光学系统进展与展望[J]. 红外技术, 2019, 41(1): 1-10.
WANG Lingxue, CAI Yi. Recent progress and perspectives of infrared optical systems [J]., 2019, 41(1): 1-10.
[2] 吉书鹏. 机载光电载荷装备发展与关键技术[J]. 航空兵器, 2017(6): 3-12.
JI Shupeng. Equipment development of airborne electro-optic payload and its key technologies[J]., 2017(6): 3-12.
[3] 黄俊, 张正勇, 田省民. 机载对地光电探测设备现状及发展趋势研究[J]. 红外技术, 2018, 40(5): 412-416.
HUANG Jun, ZHANG Zhengyong, TIAN Shengmin. Current status and development trend of airborne air to ground electro-optical detection equipment[J]., 2018, 40(5): 412-416.
[4] 王向军, 王敏. 适用于无人机小型吊舱的变焦控制系统设计[J]. 光电工程, 2013, 40(1): 139-144.
WANG Xiangjuna, WANG Min. A zoom system design suitable for miniaturization of UAV pod[J]., 2013, 40(1): 139-144.
[5] 薛慧, 李常伟. 红外中波连续变焦光学系统的设计[J]. 红外与毫米波学报, 2012, 31(5): 421-424.
XUE Hui, LI Changwei. Optical design of infrared continuous-zoom lenses[J]., 2012, 31(5): 421-424.
[6] 吴海清, 李同海, 赵新亮, 等. 大靶面中波红外连续变焦光学系统设计[J]. 红外, 2019, 40(1): 7-10.
WU Haiqing, LI Tonghai, ZHAO Xinliang, et al. Design of large imaging plane middle wave infrared continuous zoom optical system[J]., 2019, 40(1): 7-10.
[7] 王之江. 实用光学技术手册[M]. 北京: 机械工业出版社, 2007: 429-430.
WANG Zhijiang.[M]. Beijing: China Machine Press, 2007: 429-430.
Design of Airborne Miniaturized Middle Wavelength Infrared Continuous Zoom Optical System
WU Haiqing1,WANG Weichao2
(1.().,471009,;2..,471009,)
To satisfy the requirements of an airborne electro-optical system for miniaturized and lightweight optical system of an infrared thermograph, a 22´continuous zoom optical system of 30–660mm was realized by combining front-end afocal extender and back-end continuous zoom optical system. The total optical length of the system was 244mm, and the total length/maximum focal length ratio was 0.37. The system had a small optical length and large zoom ratio, which makes the system suitable for large airborne electro-optical pod systems for long-distance detection. Upon removing the front afocal extender, the back-end system could achieve a 22´continuous zoom optical system of 15 to 330mm. The total optical length of the system was 138mm, and the total length/maximum focal length ratio was 0.42. The system can be used as a continuous zoom optical system in small-and medium-sized airborne electro-optical pod systems for close-range target detection. The design results exhibit that the system can capture images effectively in both states: at the characteristic frequency of 33 lp/mm corresponding to the detector, all the MTF values of the central field view were approximately 0.3, close to the diffraction limit, all the MTF values of the 0.7 field view were approximately 0.2, and all the MTF values of the edge field view were approximately 0.15, which satisfies the application requirements.
miniaturization,optical design,continuous zoom system,middle wavelength infrared
O439;TH74
A
1001-8891(2021)12-1177-06
2021-01-01;
2021-11-25.
吴海清(1982-),男,陕西榆林人,高级工程师,硕士,主要研究方向为成像光学系统设计。E-mail: whqcust@163.com。
