高速磁悬浮列车在双端供电模式下的电流控制策略
2021-12-22朱进权葛琼璇孙鹏琨王晓新
朱进权 葛琼璇 孙鹏琨 王晓新 张 波
高速磁悬浮列车在双端供电模式下的电流控制策略
朱进权1,2葛琼璇1孙鹏琨1,2王晓新1张 波1
(1. 中国科学院电力电子与电气驱动重点实验室(中国科学院电工研究所) 北京 100190 2. 中国科学院大学 北京 100049)
针对双端供电模式下高速磁悬浮列车牵引系统中的环流和馈电电缆损耗问题,提出一种改进的直接模式法电流控制策略来协调负载电流分配。该文首先建立双端供电模式下牵引系统电机电流和环流的等效电路模型,分析环流产生的原因,在此基础上提出同步坐标系下转速电流双闭环控制策略。该策略通过共用转速调节器实现总负载电流控制,通过电流调节器和环流调节器实现负载电流分配,并对线路中的环流进行抑制。硬件在环实验结果表明,该控制策略在保证电机动态性能较好的基础上实现逆变器负载电流分配,降低了馈电电缆损耗,并有效地抑制了并联逆变器模块间环流。
高速磁悬浮列车 双端供电模式 馈电电缆 环流 损耗
0 引言
与传统的轨道交通不同,高速磁悬浮交通采用长定子直线同步电机驱动,具有运行速度快、安全舒适、运营成本低、环境友好的优点,适于远距离、高速运输[1]。采用两步法配置的高速磁悬浮交通牵引供电系统框图如图1所示,实际运行过程中采用定子分段供电的方式,由轨道两端的牵引变电站通过馈电电缆向不同的定子绕组供电,包括单端供电模式和双端供电模式两种供电模式[2]。
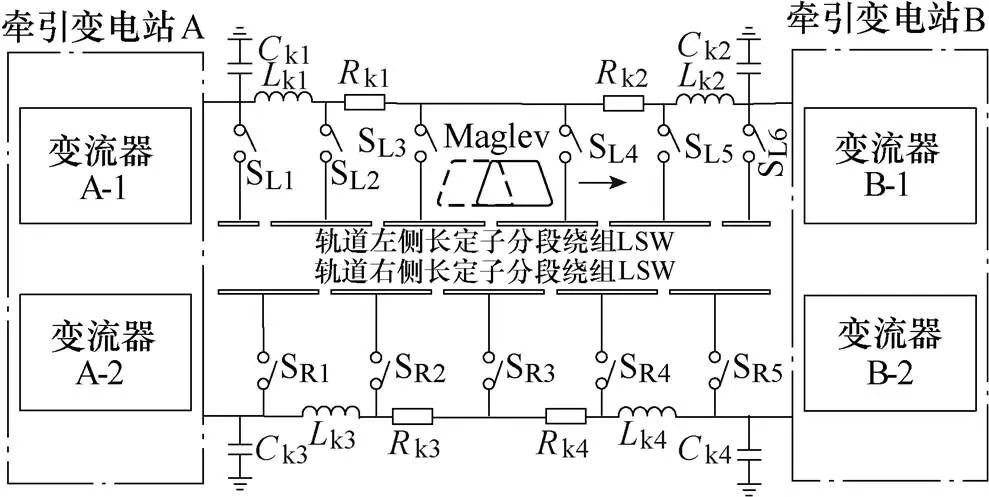
图1 磁悬浮列车牵引供电系统框图
当列车速度较低时,运行于单端供电方式,即只用线路一端的变流站为车辆供电,受制于单端变流器的容量所限,磁悬浮列车只靠单端供电方式不能达到很高的速度。为了降低单个变流器的输出容量并保证供电的可靠性,磁悬浮列车在高速运行时,会采用双端供电模式,即由位于线路两端的两个变流站通过馈电电缆同时为车辆供电。
双端供电模式是高速磁悬浮系统特有的一种供电方式,其本质上是两套变流器经馈电电缆并联给长定子直线同步电机供电,采用并联逆变器结构可很好地提升系统的容量、可靠性和效率,但随之而来的是环流问题[3-4]。由于功率器件触发延时和死区影响等,各逆变器输出的瞬时电压不完全一致,以及线路阻抗差异产生环流,环流导致各变流器电流波形畸变和功率不均衡,从而使变流器系统性能下降[5-6]。对于高速磁悬浮系统而言,馈电电缆的参数随着行驶里程和电流频率等参数实时变化,近端的馈电电缆参数随着里程的增加而增加;相反,远端的馈电电缆参数随着里程增加而减小,由于两端馈电电缆阻抗差异较大,即使两台变流器输出相同幅值频率和相位的电压,变流器之间也存在环流。与此同时,由于变流器连接的馈电电缆长达30~50km,阻抗较大,会在电缆上产生压降,造成损耗。因此需要同时考虑环流抑制和降低馈电电缆损耗两方面因素,对双端供电模式下的电流控制策略展开研究。
目前并联逆变器的环流抑制研究主要集中在公共母线结构的零序环流抑制[7–9],而针对独立母线下环流抑制的研究较少。文献[10]分析了并联逆变器的理想运行特性,只有当并联逆变器的输出电压具有相同的频率、相位、幅值,并且被均匀调制时,并联逆变器之间才不会产生环流。文献[11]分析了死区效应、直流母线波动以及中点电压偏移这些非理想因素和线路阻抗差异对环流的影响,提出了直接模式控制策略,抑制了非理性因素造成的并联系统的环流,但没有考虑线路阻抗差异较大时产生的环流。文献[12]提出针对独立母线的背靠背变流器并联驱动永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)驱动系统的环流控制策略,该策略有效地抑制了稳态和暂态运行时的环流,通过对零轴的差分控制,降低了零序环流,同时提高了控制器带宽。文献[13]针对直流侧独立供电的混合型逆变器并联结构,提出主从式控制策略,抑制零序环流,降低了电流谐波。文献[14]提出一种分布式控制策略,将所有的控制分散在每个逆变器中,通过两条总线互联,同时加入环流调节器,调节电压基准值,实现均流。
针对磁悬浮列车运行过程中馈电电缆实时变化问题,文献[15]考虑馈电电缆长度变化对牵引控制的影响,改进磁悬浮列车在高速运行的控制效果,但没有涉及馈电电缆变化造成的损耗问题。文献[16]提出一种考虑损耗的电流控制策略,采用几组不同的电流分配比来降低馈电电缆损耗,但不能实时调节电流分配比。
本文针对磁悬浮列车在双端供电模式下环流与馈电电缆损耗问题,提出一种改进的直接模式法电流控制策略,在抑制两台变流器之间环流的同时降低了馈电电缆的损耗。首先建立了双端供电模式下并联系统电机电流和环流的等效电路模型,分析环流产生的原因;在此基础上提出改进的控制策略;最后在基于RT-Lab的高速磁悬浮半实物系统进行硬件在环实验,验证了算法的正确性,在实际的高速磁悬浮线路应用中具有重要的实用价值。
1 双端供电方式下牵引系统环流分析
双端供电模式下长定子直线同步电机驱动系统模型如图2所示。图2中,a1、b1、c1、a1、b1、c1分别为第一台变流器的输出电压和输出电流,a2、b2、c2、a2、b2、c2分别为第二台变流器的输出电压和输出电流,a、b、c、a、b、c分别为长定子直线电机定子绕组端部电压和定子绕组三相电流,1、2、1、2为两端馈电电缆等效电阻和电感,s、s为定子电阻和电感。
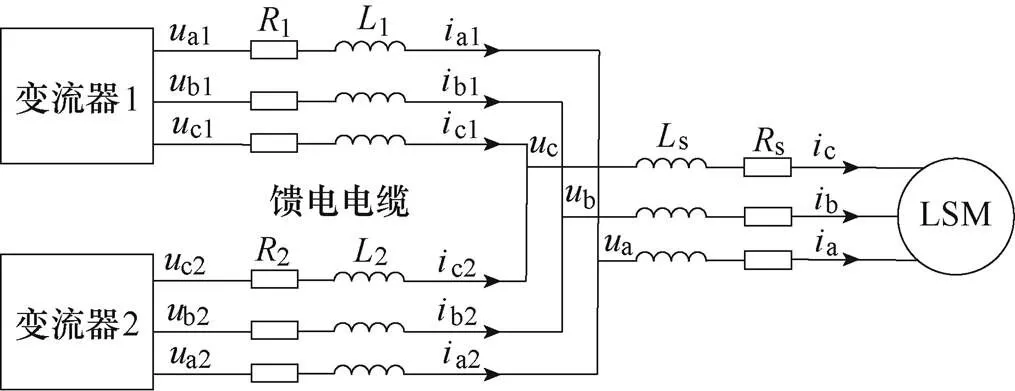
图2 长定子直线电机双端供电原理
根据图2可以得到,在双端供电模式下,变流器和负载的电压方程分别为

其中

根据环流的定义,环流cc可以表示为
将式(2)代入式(1),化简可得
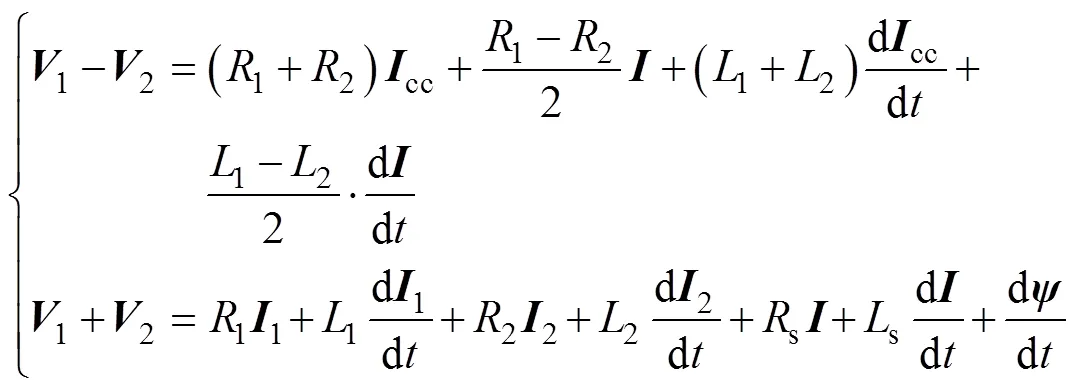
根据式(3)得到长定子直线电机双端供电等效电路如图3所示,从图3a可以看出,在双端供电模式下,两台变流器之间的环流由变流器输出电压差异和两端馈电电缆阻抗值差异两部分产生。考虑下面两种情况分析双端供电模式下的环流问题:
(1)假定两台变流器相连的馈电电缆参数一致,即1=2,1=2,则式(3)中的环流项可化简为
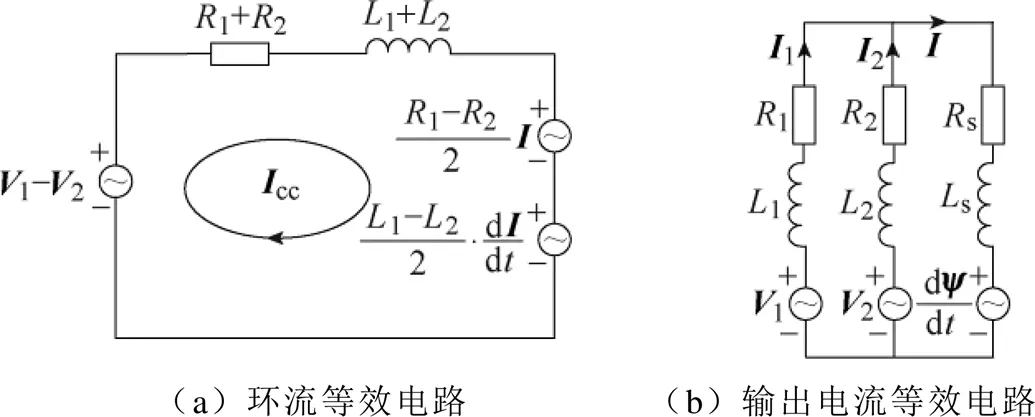
图3 长定子直线电机双端供电等效电路

由式(4)可知,在情况(1)下,环流取决于线路总的馈电电缆阻抗值以及各逆变器输出端电压的差值。由于不均匀调制、死区效应及器件差异等非理想因素造成的端电压差异较小[17],并且线路长、总阻抗值较大,因此变流器输出电压差异造成的环流是很小的。
(2)假定两台变流器输出端电压一致,即1=2,则式(3)中的环流项可化简为

由式(5)可知,在情况(2)下,环流取决于变流器所连接的馈电电缆阻抗差异,对于高速磁悬浮系统,运行过程中阻抗实时变化,差异较大,因此会导致很大的环流。综上所述,可知变流器之间的环流主要是由馈电电缆阻抗差异导致的。
此外,从图3b可知,由于两台变流器之间相隔较远,馈电电缆阻抗大,会在电缆上造成很大的损耗,因此需要研究线路参数实时变化时,如何抑制并联系统的环流以及降低馈电电缆损耗。
为了便于分析,采用等幅值变换将式(1)所示三相坐标系下的微分方程转换到dq坐标系下,可得
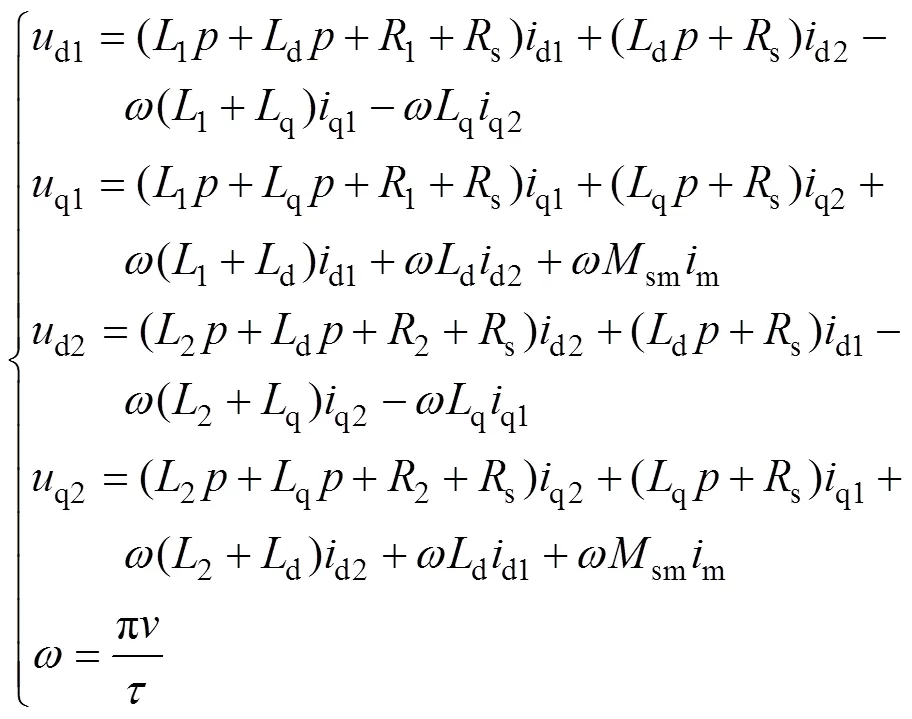
式中,d1、q1、d1、q1为第一台变流器输出电压和输出电流在d、q坐标系下的分量;d2、q2、d2、q2为第二台变流器输出电压和输出电流在d、q坐标系下的分量;d、q为定子绕组在d、q坐标系下的电感;sm为定子与动子间的互感;m为励磁电流;为列车速度;为极距;为动子角速度;为微分算子。
2 直接模式法控制策略
环流会造成变流器电流波形畸变和功率不均衡,而主从模式法通过控制单台变流器的电流,间接地控制总电机定子电流和环流[18]。为了直接控制变流器间环流和电机总电流,可以将变流器输出电压之和dsum、qsum与电压之差dsub、qsub作为输入变量,以变流器输出的总电流d、q和环流dcc、qcc作为状态变量[2],进行变换,推导出直接模式下的电压方程为
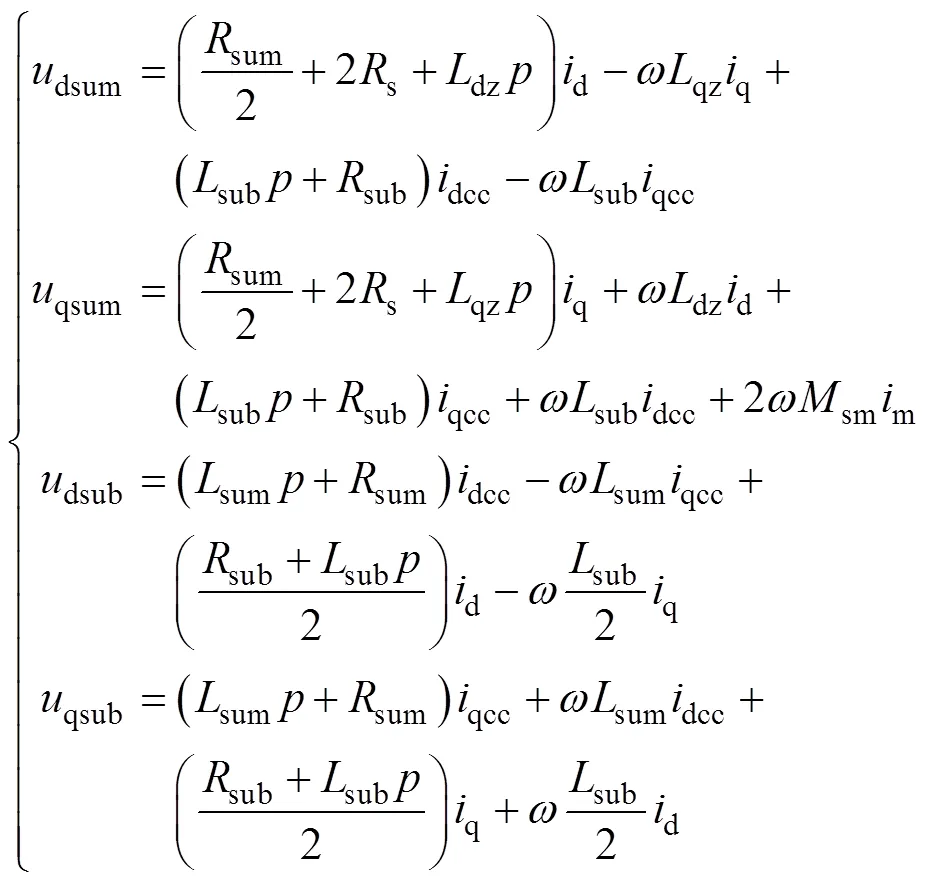
其中




3 改进的直接模式法控制策略
3.1 基于最低损耗的直接模式法控制策略
为了降低馈电电缆的损耗,本文首先提出一种基于最低损耗的直接模式法控制策略,保证两端馈电电缆总损耗最低。当两端变流器采用不同电流分配比时,假设第一台变流器提供电流为iq,其中0<<1,则另一台变流器提供电流为(1-a)q,可得环流为
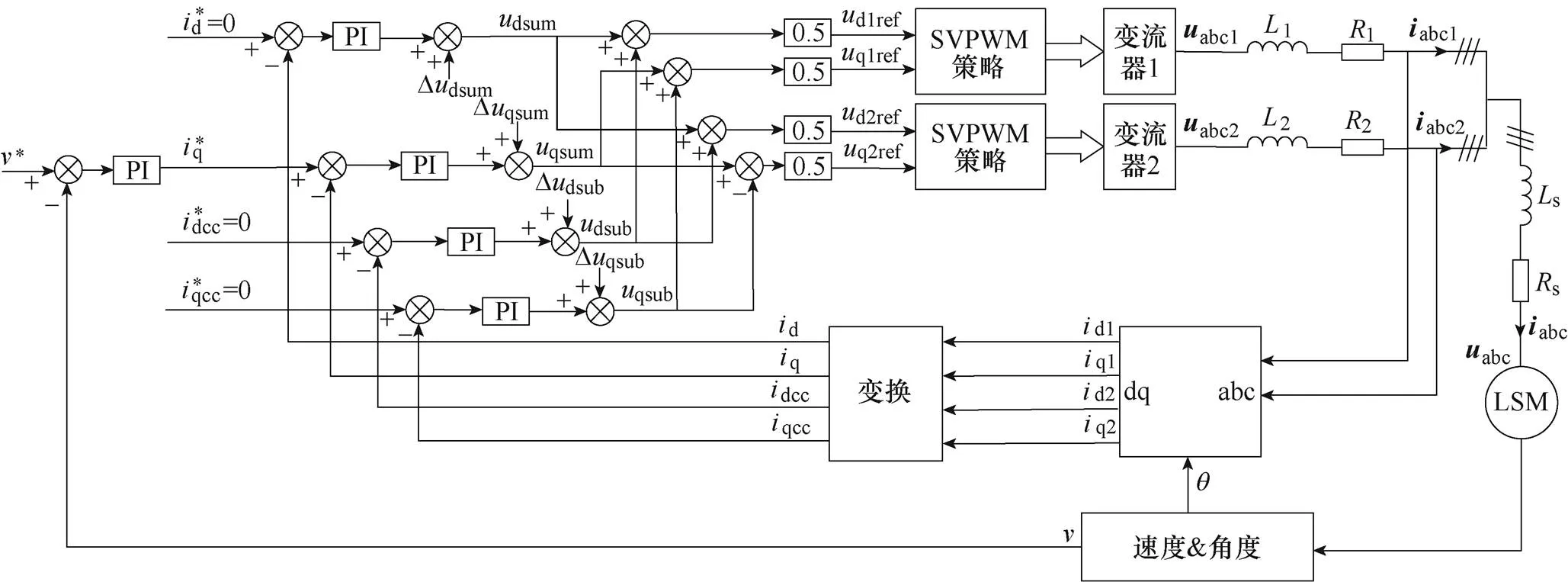
图4 传统直接模式法控制策略

在磁悬浮列车运行过程中,馈电电缆电阻值随着列车行驶的里程实时变化,正比于馈电电缆的长度,根据文献[20],可得电阻的计算公式为

式中,为磁悬浮列车速度(m/s);为磁悬浮列车与牵引变流站的距离(km);为馈电电缆电阻值(W)。
假设与牵引变电站A和B相连的馈电电缆电阻分别为1和2,馈电电缆的总电阻为R,则

由式(11)可以求得馈电电缆的损耗功率为

由式(12)可知,损耗功率是关于电流比的二次函数,对函数求导,得到当=1-时,函数取得极小值,馈电电缆损耗最低。此时变流器输出的电流与相连的馈电电缆电阻值成反比,随着行驶里程的变化实时调节电流分配比,以保证两端的馈电电缆总损耗最低,然而这种策略会导致两台变流器之间会存在很大的环流。
3.2 基于等功率输出的直接模式法控制策略
为了在控制变流器环流的同时降低馈电电缆损耗,本文进而提出了基于等功率输出的控制策略,保证两台变流器输出相同的功率,以此来调节电流分配比。由双端供电方式下牵引控制系统的电压方程式(6)可以得到两台变流器输出的瞬时有功功率分别为
当两台变流器输出功率相等时,即1=2,对式(13)联立求解可得

为了限制环流的大小,还需要进一步对电流分配比进行限幅,本文设置在磁悬浮列车运行过程中最大环流不超过总电流的10%,具体限幅值可以根据实际调整。因此,可得到最终的环流给定值为
对于整个电机调速系统,忽略变流器损耗时,变流器输出的三相瞬时功率等于电机的瞬时功率与馈电电缆损耗功率的总和,即
由式(16)可知,当两端馈电电缆的电阻值相等时,两端分配相同的电流,输出功率相等;当某一个变流器所连接的馈电电缆电阻值增大时,损耗功率增加,为了保证两台变流器输出功率基本一致,该变流器分配的电流则相应的减小,进而降低损耗。通过以上分析可得基于等功率的直接模式法电流控制策略如图5所示。该策略通过动态调节电流分配比,阻抗大的一端分配小电流,阻抗较小的一端分配大电流,能够有效地利用变流器的输出能力,降低损耗、提高效率,同时控制环流在允许的范围内。

图5 基于等功率的直接模式法电流控制策略
4 实验验证和结果分析
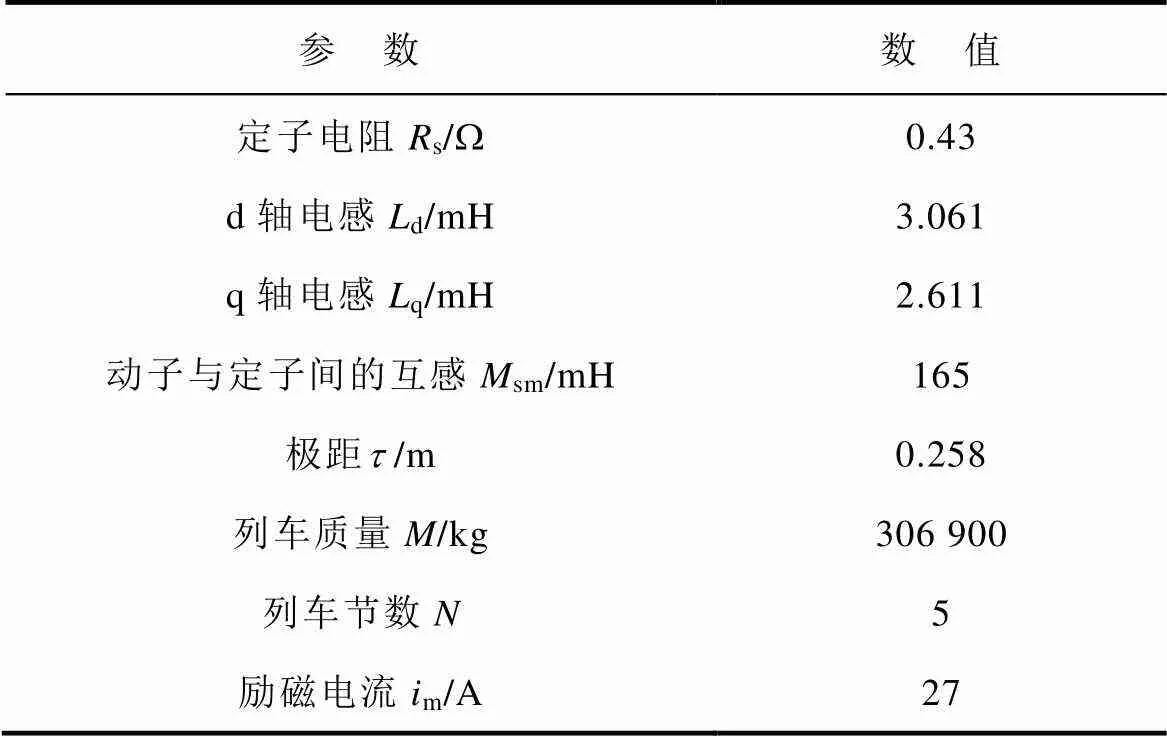
为了在实验室环境下验证本文所提出的控制策略的有效性,本文搭建的基于RT-Lab的高速磁悬浮牵引半实物系统如图6所示,由RT-Lab测试系统和牵引控制系统组成。RT-Lab测试系统包括四套24MV·A高功率变流器仿真子系统和一套直线电机仿真子系统,其中每台FPGA仿真机对应一套高功率变流器仿真子系统[21]。表1给出了长定子直线同步电机的主要参数。

图6 高速磁悬浮牵引半实物系统
表1 长定子直线电机参数
Tab.1 Long stator linear motor parameters
按照表1的参数,在高速磁悬浮牵引半实物系统上进行了硬件在环实验,磁悬浮列车按照最高时速为600km/h的运行条件从A端驶向B端,速度和位置曲线如图7所示。实验过程中定子段长度为1.2km,两端牵引变电站距离设定为60km,定子换步方式采用两步法换步。
在磁悬浮列车运行过程中,馈电电缆电阻值随着列车行驶的里程实时变化,正比于馈电电缆的长度,与A端牵引变电站相连的馈电电缆长度逐渐增加,而与B端牵引变电站相连的馈电电缆长度逐渐减少,当列车行驶里程达30km时,两端馈电电缆长度一致。图8~图10分别是磁悬浮列车在A端附近、线路中部以及B端附近的电流波形,其中,图8a、图9a、图10a为传统的直接模式法控制策略的电流波形,图8b、图9b、图10b为基于最低损耗的直接模式法控制策略的电流波形,图8c、图9c、图10c为基于等功率输出的直接模式法控制策略的电流波形。a1和a2分别为两台变流器的A相输出电流,m为电机电流,cc为环流。

图7 磁悬浮列车速度和位置波形
从图8~图10的结果可见,在磁悬浮列车整个运行过程中,三种控制策略都能保证电机侧的总电流一致,电机电流不受环流影响,环流在两台变流器之间流动。从图9可知,当列车行驶到线路中部时,两端馈电电缆参数基本一致,三种控制策略下两台变流器的电流a1和a2波形基本重合,环流被抑制在很低的水平,不超过50A。
当磁悬浮列车靠近牵引变电站A时,A端线路参数小,B端线路参数大,即1<2。从图8a可知,即使两端线路参数不一致,传统的直接模式控制策略也能很好地抑制环流,环流cc<150A。而基于最低损耗的策略为了降低损耗,此时输出的电流与相连的馈电电缆电阻值成反比,从图8b可以看出,a1>a2,这种方式存在较大的环流,高达600A。从图8c可知,基于等功率输出的策略,即使两端参数差异较大,也可以将环流控制在允许范围内,cc不超过电机总电流m的15%。从图10可知,此时磁悬浮列车靠近牵引变电站B,B端线路参数小,A端线路参数大,即1>2,也可以得到类似的结论,在此不再赘述。

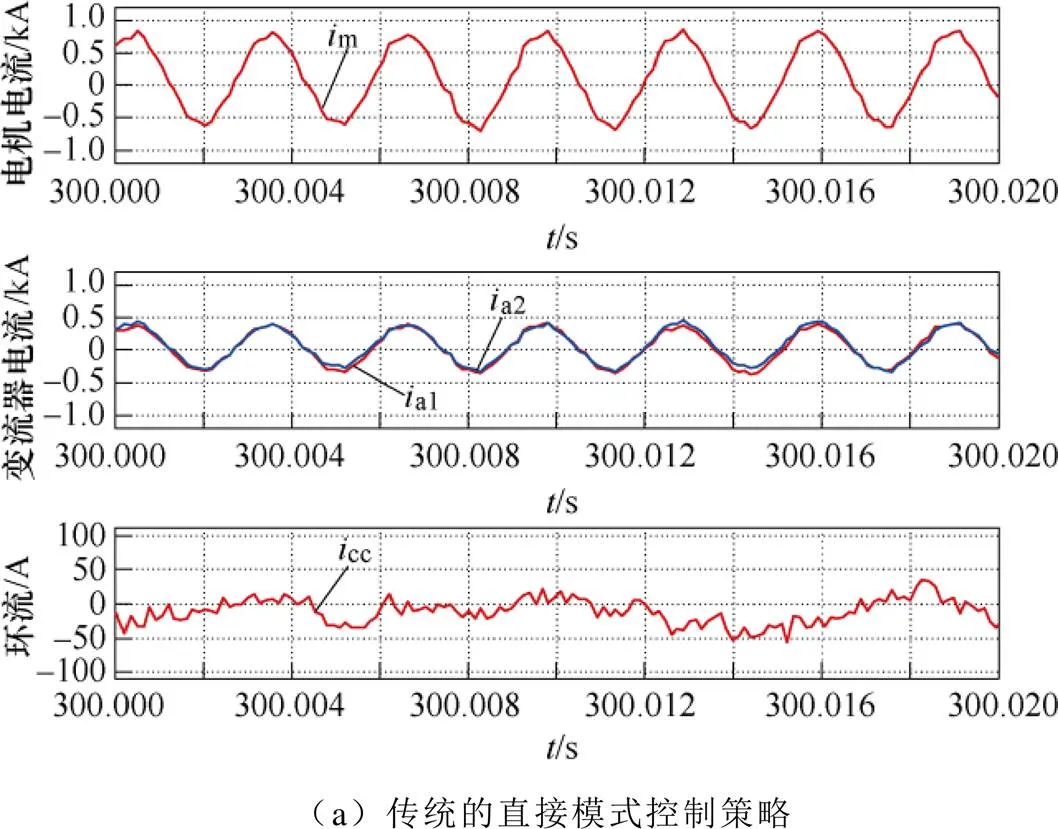
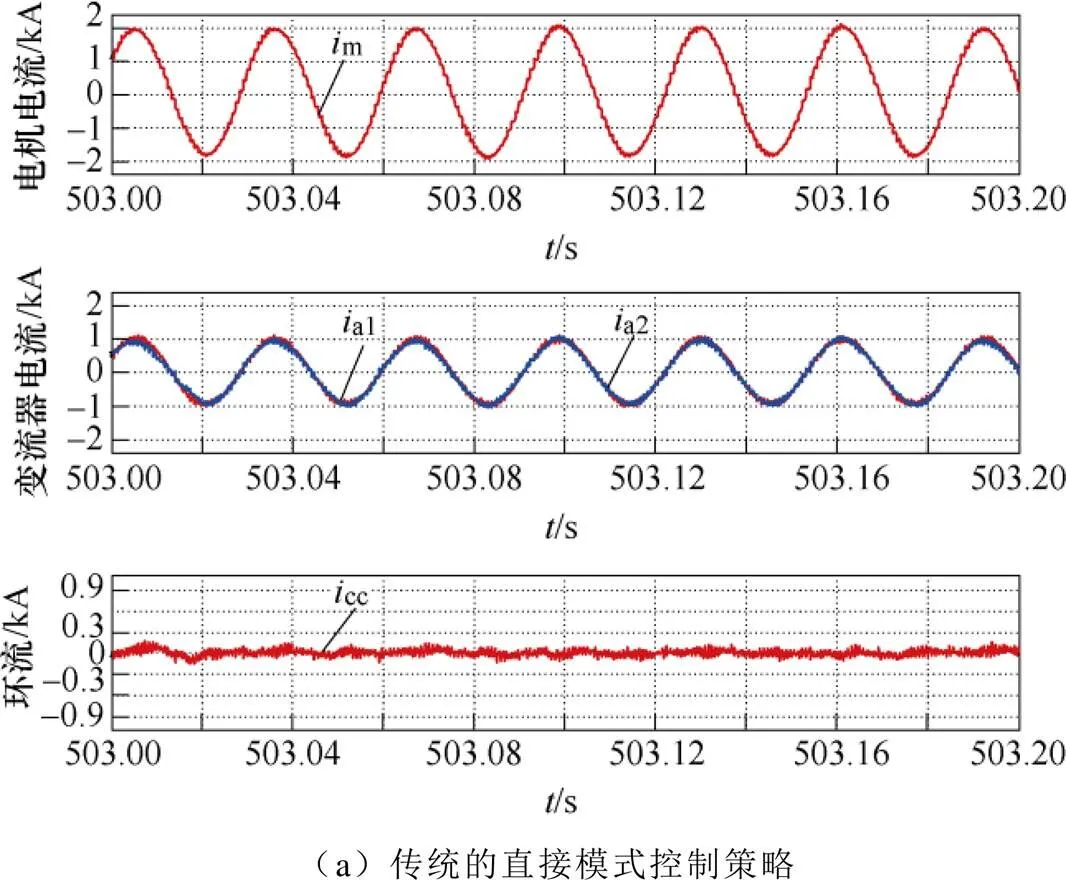
图11是磁悬浮列车在三种控制策略下的电流、馈电电缆损耗功率以及变流器输出有功功率波形。q1和q2分别为两台变流器的q轴输出电流,loss1和loss2分别为两端馈电电缆的损耗功率,loss为总的馈电电缆损耗功率,1和2分别为两端变流器输出的有功功率。
从图11a可知,传统的直接模式法控制策略,能很好地控制环流,两台变流器的输出电流q1和q2基本一致,但此时馈电电缆总损耗很高,loss最高达到3MW,浪费了电能。从图11b可知,基于最低损耗功率的控制策略以降低损耗为出发点,全程最大损耗功率不超过2MW,降低了损耗,但这种控制策略造成了两台变流器输出功率严重不均衡以及存在很大的环流,不利于变流器的稳定运行。从图11c可以看出,基于等功率输出的控制策略与传统的控制策略相比,环流略有增加,但依然控制在允许的范围内,损耗较低,与基于最低损耗的控制策略相比,馈电电缆损耗有所增加,但全程两台变流器的输出功率1和2基本一致,环流较小。
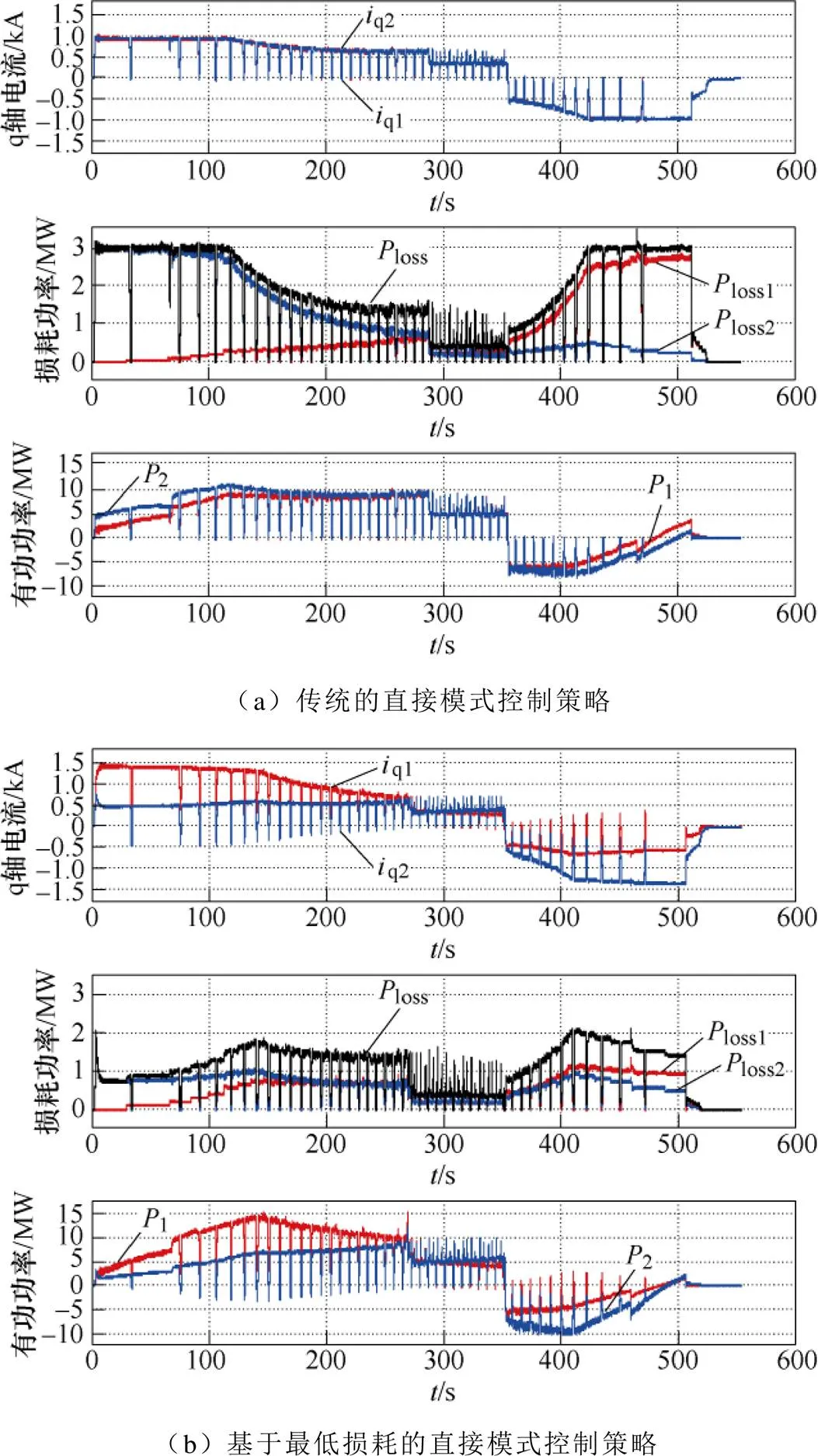
不同控制策略下馈电电缆的损耗情况见表2,可以看出,传统控制策略环流最小但总损耗最大,高达965.338MJ;基于最低损耗的直接模式控制策略运行总损耗最低,相较于传统控制策略,损耗下降达40%,但存在较大的环流。上述两种控制策略各有优缺点,实际应用中需要同时考虑环流以及馈电电缆损耗的问题,因此第三种控制策略结合前面两种控制策略的优点,保证电机动态性能较好的基础上实现了电机电流分配,馈电电缆损耗降低了12%,并有效地抑制环流。
表2 不同控制策略下馈电电缆的损耗情况

Tab.2 The loss on feed cables under different strategies
5 结论
针对高速磁悬浮列车在双端供电模式下由于馈电电缆长度变化带来的环流与损耗问题,提出了一种改进的电流控制策略,实时调节负载电流。通过理论分析和硬件在环实验,表明该控制策略在保证电机动态性能较好的基础上实现了逆变器负载电流分配,降低了馈电电缆损耗,并有效地抑制并联逆变器模块间的环流,在实际的高速磁悬浮线路中应用具有重要的实用价值。
[1] Hellinger R, Mnich P. Linear motor-powered trans- portation: history, present status, and future outlook[J]. Proceedings of the IEEE, 2009, 97(11): 1892-1900.
[2] 朱进权, 葛琼璇, 孙鹏琨, 等. 基于自抗扰的高速磁悬浮列车牵引控制策略[J]. 电工技术学报, 2020, 35(5): 1065-1074.
Zhu Jinquan, Ge Qiongxuan, Sun Pengkun, et al. Traction-system research of high-speed maglev based on active disturbance rejection control[J]. Transa- ctions of China Electrotechnical Society, 2020, 35(5): 1065-1074.
[3] Narimani M, Moschopoulos G. Improved method for paralleling reduced switch VSI modules: harmonic content and circulating current[J]. IEEE Transactions on Power Electronics, 2014, 29(7): 3308-3317.
[4] Wang Zheng, Chen Jian, Cheng Ming, et al. Field- oriented control and direct torque control for paralleled VSIs fed PMSM drives with variable switching frequencies[J]. IEEE Transactions on Power Electronics, 2016, 31(3): 2417-2428.
[5] Matsui K, Kawata Y, Ueda F. Application of parallel connected NPC-PWM inverters with multilevel modulation for AC motor drive[J]. IEEE Transactions on Power Electronics, 2000, 15(5): 901-907.
[6] 王政, 郑杨, 张兵, 等. 并联逆变器馈电PMSM调速系统谐波和环流控制[J]. 电机与控制学报, 2014, 18(12): 64-71.
Wang Zheng, Zheng Yang, Zhang Bing, et al. Harmonics and circulating current suppression in paralleled inverters fed permanent magnet synchronous motor drive system[J]. Electric Machines and Control, 2014, 18(12): 64-71.
[7] Quan Zhongyi, Li Yunwei. A three-level space vector modulation scheme for paralleled converters to reduce circulating current and common-mode voltage[J]. IEEE Transactions on Power Electronics, 2017, 32(1): 703-714.
[8] Jiang Dong, Shen Zewei, Wang Fei. Common-mode voltage reduction for paralleled inverters[J]. IEEE Transactions on Power Electronics, 2018, 33(5): 3961-3974.
[9] Li Ru, Xu Dianguo. Parallel operation of full power converters in permanent-magnet direct-drive wind power generation system[J]. IEEE Transactions on Industrial Electronics, 2013, 60(4): 1619-1629.
[10] Cai Hui, Zhao Rongxiang, Yang Huan. Study on ideal operation status of parallel inverters[J]. IEEE Transa- ctions on Power Electronics, 2008, 23(6): 2964-2969.
[11] 吕晓美. 大功率三电平逆变器并联、串联运行特性分析[D]. 北京: 中国科学院电工研究所, 2011.
[12] Wang Fei, Wang Yong, Gao Qiang, et al. A control strategy for suppressing circulating currents in parallel-connected PMSM drives with individual DC links[J]. IEEE Transactions on Power Electronics, 2016, 31(2): 1680-1691.
[13] 魏永清, 张晓锋, 于飞, 等. 直流侧独立供电的混合型逆变器控制策略[J]. 电工技术学报, 2017, 32(24): 139-145.
Wei Yongqing, Zhang Xiaofeng, Yu Fei, et al. Control strategy of hybrid inverters with independent supplies in DC side[J]. Transactions of China Electrotechnical Society, 2017, 32(24): 139-145.
[14] Hua Ming, Hu Haibing, Yang Xing, et al. Distributed control for AC motor drive inverters in parallel operation[J]. IEEE Transactions on Industrial Electronics, 2011, 58(12): 5361-5370.
[15] 刘金鑫, 葛琼璇, 王晓新, 等. 高速磁悬浮牵引控制系统半实物实验研究[J]. 电工技术学报, 2015, 30(14): 497-503.
Liu Jinxin, Ge Qiongxuan, Wang Xiaoxin, et al. Hardware-in-loop research of traction-system for high-speed maglev[J]. Transactions of China Electro- technical Society, 2015, 30(14): 497-503.
[16] Tan Qiang, Wei Rong, Wang Xiaoxin, et al. Traction- system research based on different proportion of current in double-end supply for high-speed maglev[C]//2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, NSW, 2017: 1-5.
[17] 张建文, 王鹏, 王晗, 等. 多逆变器并联的均流控制策略[J]. 电工技术学报, 2015, 30(18): 61-68.
Zhang Jianwen, Wang Peng, Wang Han, et al. Average current control strategy of multiple parallel inverters[J]. Transactions of China Electrotechnical Society, 2015, 30(18): 61-68.
[18] 曹文远, 韩民晓, 谢文强, 等. 交直流配电网逆变器并联控制技术研究现状分析[J]. 电工技术学报, 2019, 34(20): 4226-4241.
Cao Wenyuan, Han Minxiao, Xie Wenqiang, et al. Analysis on research status of parallel inverters control technologies for AC/DC distribution net- work[J]. Transactions of China Electrotechnical Society, 2019, 34(20): 4226-4241.
[19] 刘金鑫, 葛琼璇, 王晓新, 等. 双端供电模式下高速磁悬浮列车牵引控制策略研究[J]. 电工电能新技术, 2015, 34(6): 16-21.
Liu Jinxin, Ge Qiongxuan, Wang Xiaoxin, et al. Traction-system research for high-speed maglev based on double end supply[J]. Advanced Tech- nology of Electrical and Energy, 2015, 34(6): 16- 21.
[20] 王娟. 磁悬浮列车用长定子直线同步电机特性研究与故障分析[D]. 北京: 中国科学院电工研究所, 2004.
[21] 孙鹏琨, 葛琼璇, 王晓新, 等. 基于硬件在环实时仿真平台的高速磁悬浮列车牵引控制策略[J]. 电工技术学报, 2020, 35(16): 3426-3435.
Sun Pengkun, Ge Qiongxuan, Wang Xiaoxin, et al. Traction control strategy of high-speed maglev train based on hardware-in-the-loop real-time simulation platform[J]. Transactions of China Electrotechnical Society, 2020, 35(16): 3426-3435.
Current Control Strategy for High-Speed Maglev in the Double Feeding Mode
1,211,211
(1. Key Laboratory of Power Electronics and Electric Drive Institute of Electrical Engineering Chinese Academy of Sciences Beijing 100190 China 2. University of Chinese Academy of Sciences Beijing 100049 China)
In order to solve the problems of circulating current and large loss of high-speed maglev train in the double feeding mode, an improved direct mode current control strategy is proposed to regulate the load current distribution. Firstly, the paper establishes the equivalent circuit model of motor current and circulating current of traction system in the double feeding mode. Then, the reason of the circulating current is analyzed, and a double closed-loop control strategy of speed and current in synchronous coordinate system is proposed. This strategy controls the motor current by the speed regulator, distributes the motor current through the current regulator and the circulating current regulator, and suppresses the circulating current in the line. The results of hardware-in-the-loop (HIL) experiments show that the control strategy realizes the load current distribution of the inverter, reduces the loss on the feeder cable, and effectively suppresses the circulating current between the parallel inverter while ensuring good dynamic performance of the motor.
High-speed maglev, double feeding mode, feeder cable, circulating current, loss
10.19595/j.cnki.1000-6753.tces.201053
TM359.4
国家重点研发计划(2016YFB1200602-20)和国家自然科学基金青年基金(51907188)资助项目。
2020-08-15
2020-10-10
朱进权 男,1993年生,博士研究生,研究方向为高性能电机牵引控制技术。E-mail: zhujinquan@mail.iee.ac.cn
葛琼璇 女,1967年生,研究员,博士生导师,研究方向为高压大功率变流器控制技术、高性能电机牵引控制技术。E-mail: gqx@mail.iee.ac.cn(通信作者)
(编辑 陈 诚)
