城轨交通用飞轮储能阵列控制策略
2021-12-22刘志刚
李 进 张 钢 刘志刚 王 勇
城轨交通用飞轮储能阵列控制策略
李 进1张 钢1刘志刚1王 勇2
(1. 北京交通大学电气工程学院 北京 100044 2. 中国铁道科学研究院集团有限公司标准计量研究所 北京 100081)
在城市轨道交通供电系统中引入飞轮储能系统能够有效回收列车再生制动能量,稳定直流接触网电压,但是单飞轮储能系统容量较小,难以满足列车再生制动能量利用需求。飞轮储能阵列是解决这一问题的有效手段,然而目前对飞轮储能阵列控制策略的研究还较少。该文首先分析飞轮储能系统的数学模型和运行特性;然后考虑稳压节能及弱磁需求,给出基于多电压阈值的单飞轮储能系统控制策略;并在此基础上针对飞轮阵列均速控制和荷电状态(SOC)管理等核心问题,提出基于转差修正控制和基于“电压-转速-电流”三闭环控制的两种飞轮储能阵列控制策略;最后通过仿真和实验验证了飞轮储能阵列控制策略的可行性。
城市轨道交通 飞轮储能 飞轮储能阵列 再生制动
0 引言
城市轨道交通运行速度快、运载客量大、安全准时,能够有效缓解交通拥堵问题,受到了各大城市的青睐。近几年,城轨交通规模迅速扩大,同时也带来了巨大的电能消耗,预计未来地铁能耗将达到全国总电耗的5‰以上[1],如何降低能耗已成当务之急。据统计,城轨交通列车再生制动能量可达牵引能量的20%~40%[2],安装储能系统回收列车再生制动能量是降低轨道交通能耗的有效手段之一[3-5]。目前,轨道交通中常见的储能系统包括电池、超级电容和飞轮储能系统(Flywheel Energy Storage System, FESS),在国内外地铁线路中均有应用。如安装了电池储能系统[5-7]的日本西神山手线、谷町线等线路,安装了超级电容储能系统[8-9]的北京八通线、10号线等线路以及安装了飞轮储能系统[10-11]的洛杉矶金色线、北京房山线等线路,引入储能系统后节能效果显著且有效抑制了直流母线电压的波动。相比于电池和超级电容类的储能系统,飞轮储能系统具有瞬时功率高、储能密度大、使用寿命长、容量衰减小、环保无污染等优点,在国内外轨道交通领域受到了广泛关注[12-13]。
飞轮储能系统控制策略是研究的一个热点。为了维持牵引供电网电压的稳定,一般通过监测直流网压的变化来判断是否进行储能系统的充放电动 作[14-16]。文献[15]为了提高系统动态性能,简化了电压-电流双闭环的控制结构,提出了一种基于扩张观测器的直接电压控制策略,但其将网压二次方作为状态变量,储能系统对网压自身的波动较为敏感。文献[16]提出了一种随飞轮荷电状态(State of Charge, SOC)动态调整充放电电压阈值的控制方法,在飞轮SOC增大、减小时分别调高、调低充放电电压阈值,提高了储能系统适应工况的能力,但在多车同时牵引时可能导致SOC过低而影响储能系统的性能。
目前,单个小容量飞轮难以满足列车再生制动的需求,而大容量飞轮受制造技术的限制[17]造价昂贵,此外大容量飞轮体积质量庞大,运输和安装时存在困难。采用多个飞轮单元并联构成飞轮储能阵列(Flywheel Energy Storage Array, FESA),是解决这些问题的一种有效手段[18]。针对飞轮储能阵列的控制,文献[19]按照等微增率原则分配各个飞轮单元功率,降低了飞轮储能阵列损耗,但涉及的控制参数较多,计算过程复杂且易受电机运行状态的影响。文献[20]采用等转矩控制的方式,各飞轮单元平均分配转矩,然而由于飞轮单元自身参数差异的影响,仅采用等转矩控制会导致飞轮单元出现转速差异,影响储能阵列性能。
本文针对城轨交通飞轮储能阵列控制中面临的节能稳压、SOC管理、飞轮单元转速均衡等问题,提出了新的飞轮储能阵列控制策略。本文在完成对单飞轮储能系统控制策略设计的基础上,重点对飞轮储能阵列控制策略进行了讨论,分别提出了基于转差修正控制和基于“电压-转速-电流”三闭环控制的两种飞轮储能阵列控制策略,并完成了仿真和实验验证。
1 城轨交通飞轮储能系统
1.1 带储能系统的牵引供电系统分析
传统的城轨交通牵引供电系统主要包括牵引变电所、牵引接触网和列车三个部分。牵引变电所将10kV/35kV三相交流电降压和整流处理后,转变为1 500V/750V直流电并经由牵引接触网向列车供电。
由于当前牵引变电所的整流机组多为二极管整流机组,能量只能单向地从交流电网流向直流牵引接触网。因而,当列车进行再生制动时,多余的再生制动能量会造成牵引网电压抬升,若使用吸收电阻消耗多余制动能量,不仅会浪费大量能量,还会增加通风系统能耗。针对这些问题,本文引入了飞轮储能系统,带储能系统的牵引供电系统结构示意图如图1所示。飞轮储能系统与整流机组并联,安装在牵引变电所内,在列车制动时吸收多余的再生制动能量并在列车牵引时释放储存的能量,以实现节能与稳定网压的目的。

图1 带储能系统的牵引供电系统结构示意图
飞轮储能系统主要由双向DC-AC变换器、永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)和飞轮转子组成,飞轮储能系统拓扑如图2所示。双向DC-AC变换器作为储能系统与牵引供电系统的能量交换装置,通过合理地控制其开关脉冲即可实现对飞轮储能系统的能量管理。

图2 飞轮储能系统拓扑
1.2 飞轮储能系统数学模型和运行曲线
为了研究飞轮储能系统的控制策略,需要获得飞轮储能系统的数学模型。通常,把飞轮转子与PMSM看作一个整体进行建模,在dq坐标系下,凸极永磁同步电机的数学模型包括下列方程。
电压方程

磁场方程

转矩方程

运动方程
式中,d和q分别为定子d轴、q轴电压;d和q分别为定子d轴、q轴电流;d和q分别为定子d轴、q轴磁链;r为机械角速度;d和q分别为定子的d轴、q轴电感;f为永磁体磁链;为极对数;e为电磁转矩;l为负载转矩;为转动惯量;为摩擦因数。
在实际的运行中,考虑双向DC-AC变换器输出电流、直流侧电压的限制,以及飞轮储能系统输出转矩的需求,给出了d-q平面下的飞轮储能系统运行限制方程,如式(5)所示,从上至下依次为电压限制方程、电流限制方程和转矩限制方程。
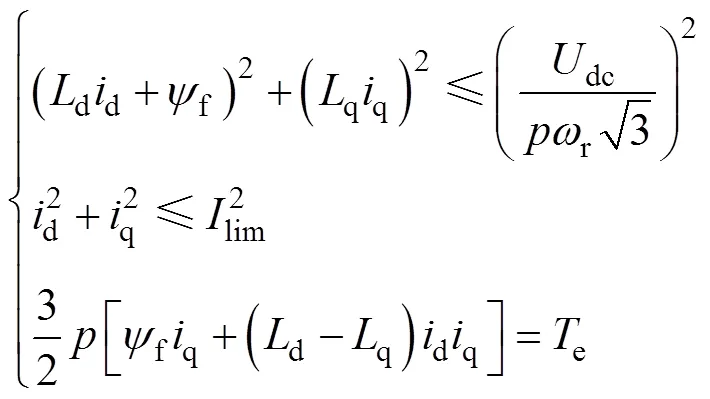
式中,Udc为变换器直流侧电压;Ilim为变换器输出电流矢量最大幅值。根据式(5)画出电流平面飞轮储能系统运行曲线如图3所示。飞轮储能系统PMSM运行工作点应位于电流限制曲线与电压限制曲线相交的区域且满足对应转矩限制曲线。采用id=0控制时,随着转速的升高,受电压限制曲线影响工作点从a点逐渐移动至b点,此时已无法满足转矩限制曲线,储能系统输出转矩降低。因此,有必要通过弱磁手段将工作点由b点扩展至点,保证飞轮储能系统在高速时仍能满足输出需求。
2 单飞轮储能系统控制策略
应用于城轨交通时,储能系统一般通过监测直流牵引网电压值进行充放电动作,由于飞轮储能系统的特殊性,在进行控制时还需要考虑对PMSM的控制。本文给出了基于多电压阈值的单飞轮储能系统控制策略,基于多电压阈值的单飞轮储能系统控制框图如图4所示,主要包括基于多阈值的模式切换与稳压控制和超前角弱磁控制两个部分。
2.1 基于多阈值的模式切换与稳压控制
储能系统采用电压-电流双闭环控制,外环为牵引网电压环,其充放电阈值的设置会对储能系统的性能产生影响。当放电阈值设置得较高时,储能系统将优先于牵引所向列车供电,迅速释放储存的再生制动能量,从而保持较低的SOC水平,有利于提高回收列车再生制动能量的能力,但其稳压能力较差;当放电阈值设置较低时,储能系统有利于在列车起动导致牵引网电压跌落时,释放能量抑制网压的跌落,但可能出现“储而不放”的情况而影响节能效果。为使储能系统兼顾稳压与节能功能,本文采用多电压阈值的方式,为电压外环设置了三个阈值char、dis1和dis2,将飞轮储能系统划分为四种工作模式,分别为充电、待机、释能和放电模式,飞轮储能系统工作模式如图5所示。图中,min和max分别为储能系统允许的最小、最大工作电压,dc0为牵引网空载电压。

图4 基于多电压阈值的单飞轮储能系统控制框图

图5 飞轮储能系统工作模式
当列车制动导致接触网电压抬升时,飞轮储能系统工作于充电模式,回收再生能量;当列车牵引导致接触网电压下跌较大时,飞轮储能系统工作于放电模式,满功率放电抑制网压跌落;而当牵引所附近列车同时进行牵引与制动,牵引网电压跌落较小以及列车处于惰行或靠站停车,仅需为列车辅助供电系统供电时,飞轮储能系统工作于释能模式,以较小功率向牵引网放电,消耗储存能量。
释能模式阈值dis1与放电模式阈值dis2的关系为

两种模式下的输出功率通过电流内环指令限制值-slim1和-slim2进行控制。以上参数应结合线路的实际情况进行选取,以获得较好的稳压与节能效果。对上述控制策略进行了仿真验证,仿真模型参数见表1。
表1 单飞轮储能系统仿真参数

Tab.1 Simulation parameters of flywheel energy storage system
图6所示为单飞轮储能系统在列车制动-靠站停车-牵引工况下的仿真波形,从上往下依次为列车功率、牵引网电压、飞轮定子电流矢量及飞轮储能系统SOC波形。其中,列车功率数据由实际线路进行牵引计算得到。飞轮储能系统能够根据列车运行状态切换相应工作模式:列车制动时工作于充电模式,SOC升高,电压稳定在1 750V左右;列车靠站停车时以较小功率为列车辅助供电系统供电,SOC缓缓下降,电压稳定在1 650V左右;列车牵引时工作于放电模式,SOC快速下降,电压稳定在1 630V左右。
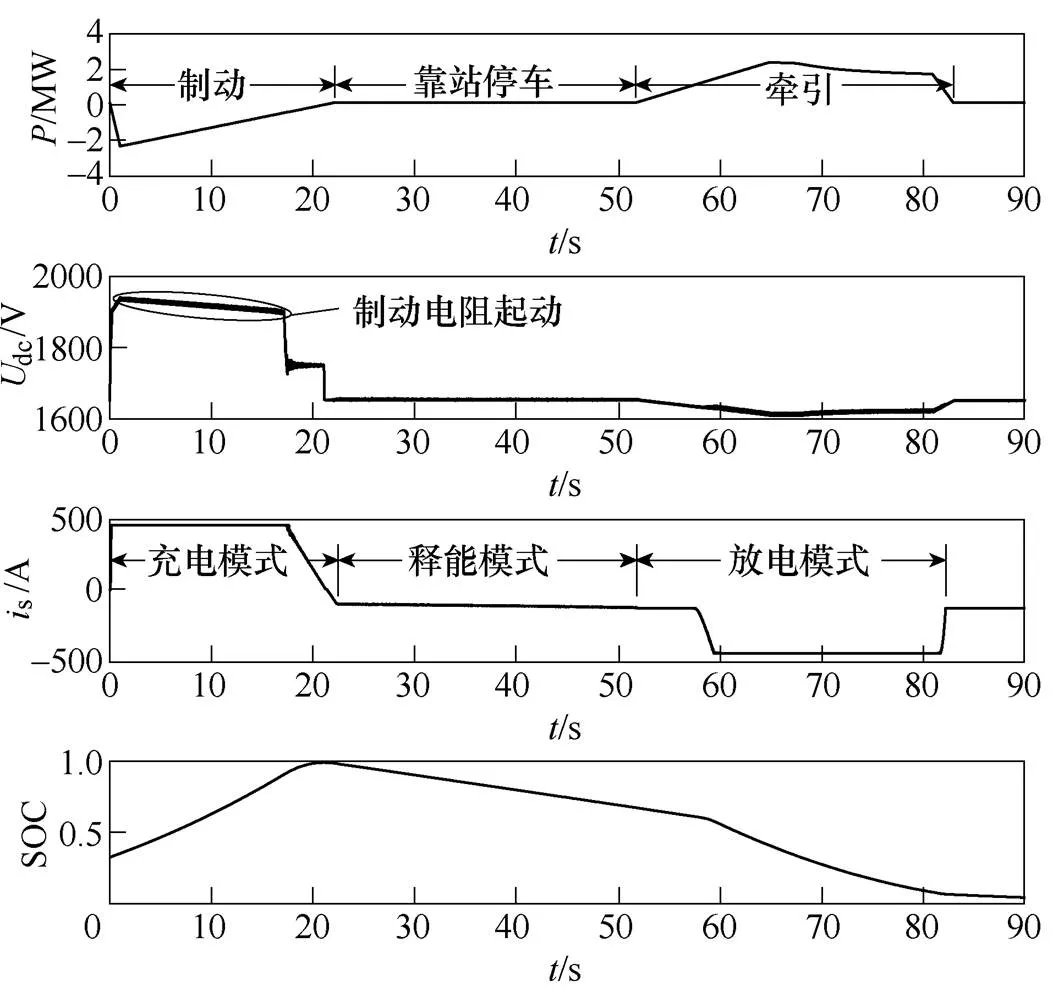
图6 单飞轮储能系统仿真波形
通过仿真可知,单飞轮储能系统能有效回收利用再生制动能量,在充电、释能与放电模式的配合下,兼顾节能与稳压功能。同时也发现了其存在的问题:单飞轮储能系统容量较小,难以满足列车再生制动能量利用需求,车载制动电阻长时间起动。
2.2 飞轮储能系统弱磁控制

根据式(7)只需获得定子电流矢量超前角度D,即可算出弱磁情况下PMSM的dq轴电流指令,考虑放电的情况,在计算d时对s取绝对值,这种弱磁控制方式被称为超前角弱磁,具体控制框图如图7所示。


图7 飞轮储能系统弱磁控制框图
图8所示为飞轮储能系统恒转矩充电时的转速和交、直轴电流仿真波形。可见,采用弱磁控制的飞轮在转速较高时仍能保证系统性能,而不采用弱磁控制的飞轮转矩明显减小,转速上升速度变慢。

图8 飞轮储能系统弱磁控制仿真波形
3 飞轮储能阵列控制策略
大容量飞轮受制造成本和运输安装条件的限制,目前难以投入工程应用,而单个小容量飞轮又无法满足列车再生制动能量利用的需求。因此,本文采取将单飞轮储能单元并联组成飞轮储能阵列的方式提升总体容量,以满足再生制动储能需求。
图9所示为飞轮储能阵列的结构,飞轮单元直流侧通过母线并联。由于不同飞轮单元在制造时不可避免地存在参数差异,所以在对飞轮储能阵列控制时,还需要考虑各个飞轮间的转速均衡。本文给出了两种飞轮储能阵列控制方案。
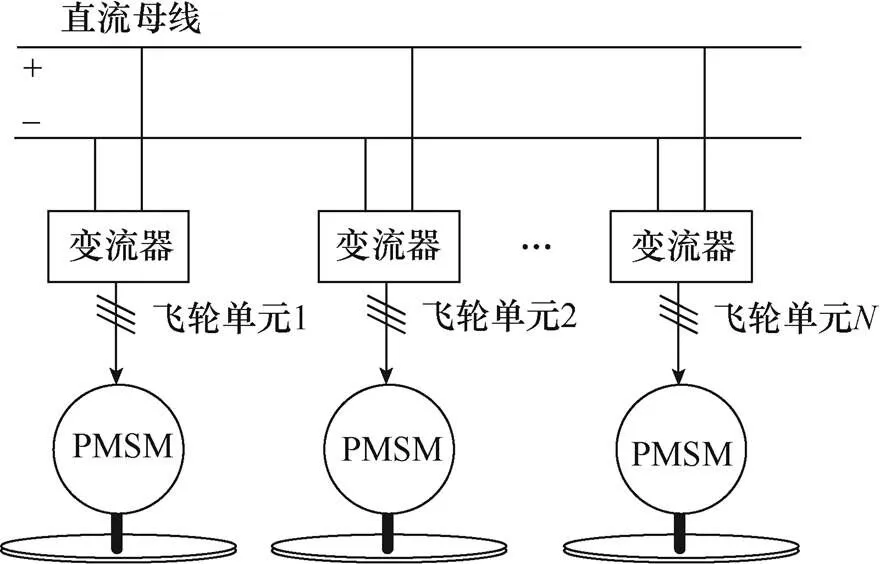
图9 飞轮储能阵列结构
3.1 基于转差修正的控制策略
不同于单飞轮储能系统,飞轮储能阵列的控制还需要关注各飞轮单元间的转速均衡,避免个别飞轮转速过高或过低,造成储能阵列容量浪费。为此,在基于转差修正的飞轮储能阵列控制策略中,根据各飞轮单元的转速差异对充放电电流指令进行了修正,具体实现方式如图10所示。

图10 基于转差的电流指令修正
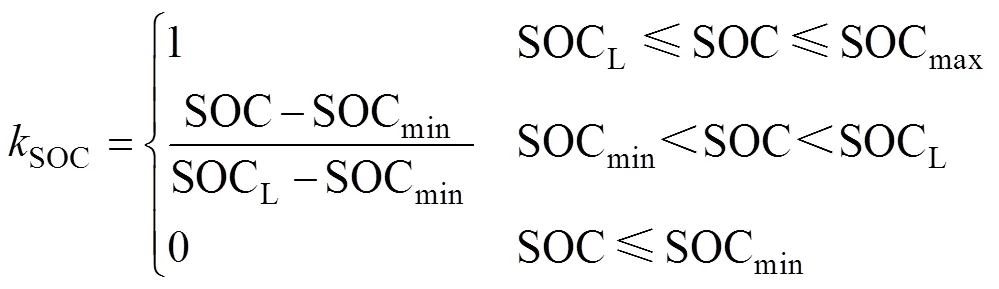
在转矩受到限制的情况下,飞轮转速的高低直接影响储能系统功率的大小,因此对飞轮SOC的管理必不可少。本文引入了系数SOC,在储能系统不同SOC状态下对充放电指令加以约束,实现SOC的管理。充电和放电工况下,系数SOC的取值如图11所示,其中SOCmax和SOCmin为飞轮储能系统SOC的上、下限,SOCmax通常为1。
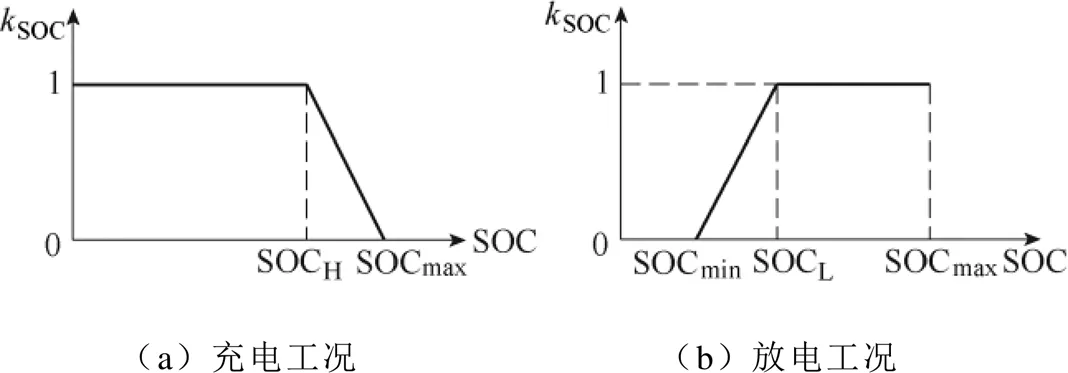
图11 系数kSOC的取值
充电工况下飞轮单元转速升高达到SOCH时,通过系数SOC限制其充电以避免转速过高。此时SOC与SOC的函数关系为

放电工况下飞轮单元转速下降至SOCL时,通过系数SOC限制其放电以避免转速过低。此时SOC与SOC的函数关系为
基于转差修正的飞轮储能阵列控制策略总体框图如图12所示。在单飞轮储能系统控制策略的基础上,增加了转差修正与SOC管理环节,以实现飞轮储能阵列的协同控制。

图12 基于转差修正的飞轮储能阵列控制策略
3.2 基于“电压-转速-电流”三闭环的控制策略
从前文来看,在设计飞轮储能阵列控制策略时,既要考虑飞轮单元间的速度均衡,又要考虑SOC的管理,这些都与飞轮的转速相关。所以,本文提出了飞轮储能阵列控制的另一种思路,即在电压外环与电流内环之间增加一个转速闭环,直接控制飞轮储能阵列中各个飞轮单元的转速。基于“电压-转速-电流”三闭环的飞轮储能阵列控制策略整体框图如图13所示,该控制策略的关键点在于如何将电压环与转速环有效地连接起来。由式(4)可知,当负载转矩为零且忽略摩擦时,飞轮储能系统运动方程为
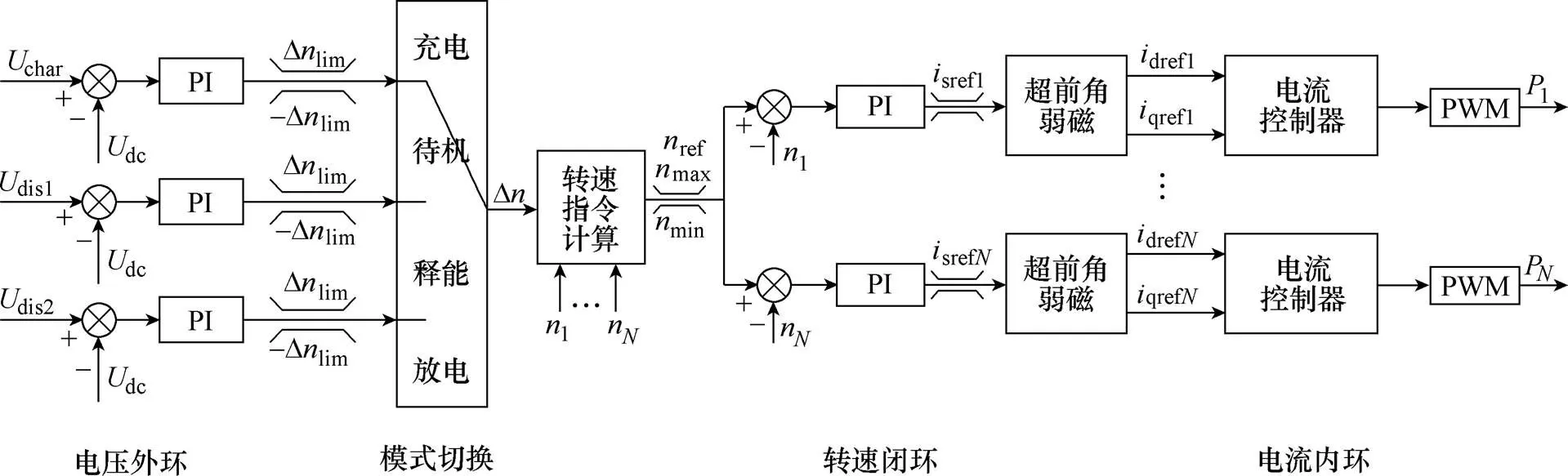
图13 基于电压-转速-电流三闭环的飞轮储能阵列控制策略
式中,为飞轮转速。由式(10)可知,通过对飞轮转速变化率d/d的控制即可实现对转矩的控制。本文将图13所示的电压外环输出指令定义为飞轮转速变化量D,由于电压闭环指令更新的间隔固定,D值的变化即代表着飞轮转速变化率的变化。利用转速指令计算环节得到各飞轮单元的统一转速指令,实现电压外环与转速闭环的有效串联。转速指令计算环节具体为

通过转速闭环对各飞轮单元进行统一的转速控制,一方面能够有效避免飞轮单元产生较大的转速差;另一方面只需对转速指令加以限制就能实现飞轮储能阵列的SOC管理。
对于飞轮储能阵列释能模式与放电模式下功率的控制,同样通过限制电流闭环输出指令sref来实现,配合不同的工作模式切换电流指令限制值-slim1和-slim2。在基于“电压-转速-电流”三闭环的控制策略中,释能模式和放电模式的电压环指令各自给出,不同于基于转差修正的控制策略中放电工况下电压外环输出指令由释能模式闭环与放电模式闭环叠加而成,这使得采用前者进行控制时,储能阵列在释能模式与放电模式间切换时不如后者平滑。表现为电流闭环指令sref在切换模式时突变,这一问题可以通过将放电模式电流闭环的PI初值设置为-slim1的方式来解决。
3.3 仿真与分析
为进一步分析上述两种飞轮储能阵列控制策略,在图6所示的列车功率波形下,进行了对比仿真。具体仿真参数见表2。
表2 飞轮储能阵列仿真参数

Tab.2 Simulation parameters of flywheel energy storage array
图14为两种飞轮储能阵列控制策略在列车制动—靠站停车—牵引工况下的仿真波形,从上往下依次为牵引网电压、电流矢量指令及飞轮储能系统SOC波形。可以发现,上述两种控制策略下,飞轮储能阵列均能够根据牵引网电压情况动作,准确地进行充电、释能及放电模式切换,完成再生制动能量的吸收与快速释放,储能阵列SOC保持在0.3~1之间。从牵引网电压波形来看,采用飞轮储能阵列后,列车制动时制动电阻起动时间有效缩短,理论上通过合理配置飞轮储能阵列容量,可以避免制动电阻的起动,实现再生制动能量的完全利用。

图14 飞轮储能阵列仿真波形
为验证上述两种控制策略的均速能力,将飞轮储能阵列中三个飞轮单元的初速度分别设置为7 000r/min、7 500r/min和8 000r/min,并对它们的转动惯量设置了5%的误差。飞轮储能阵列均速控制仿真波形如图15所示,飞轮单元经过约5s的调整后转速趋于一致并在后续的充放电过程中保持了均衡。可见,当储能阵列中的飞轮单元出现转速差异时,上述两种控制策略均能有效进行均速调整,快速消除转差并保持飞轮单元间的转速均衡。
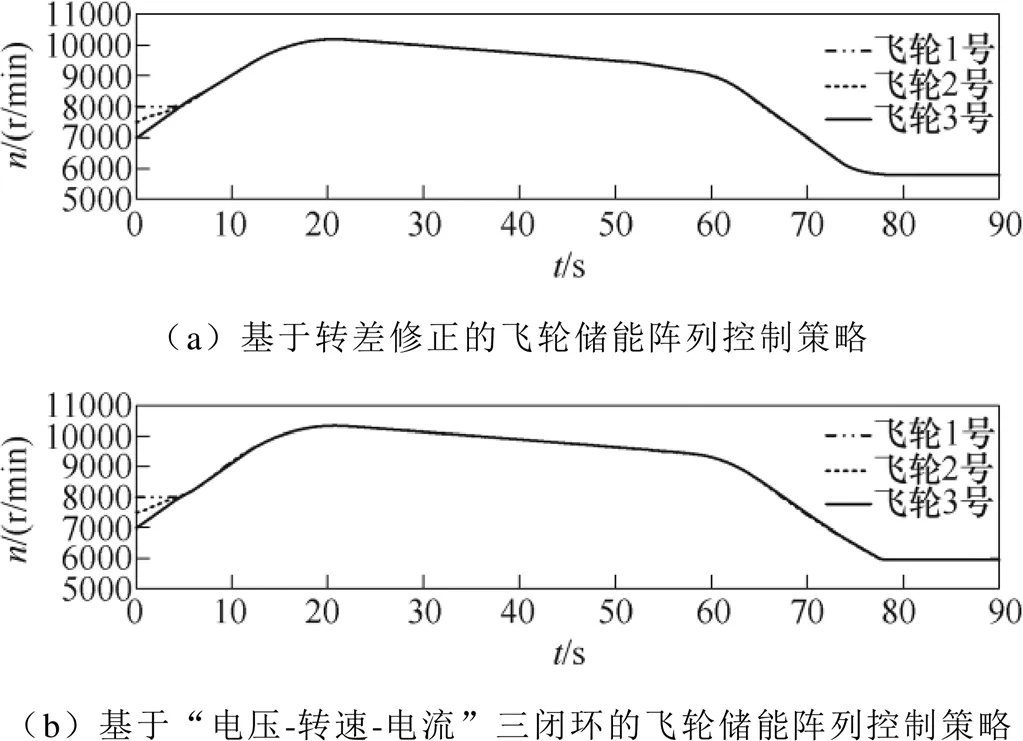
图15 飞轮储能阵列均速控制仿真波形
为进一步说明均速控制对储能阵列的影响效果,定义了转速均衡度为
由转速均衡度的定义可知,Kn越接近1,飞轮单元的转速均衡度越好。在飞轮单元平均转速为7 500r/min而Kn不同的情况下,进行了充电仿真,并将不同Kn对应的储能阵列功率波形及列车再生制动功率波形进行了对比,不同转速均衡度下储能阵列功率曲线如图16所示。由仿真可知,飞轮单元保持转速均衡时,储能阵列能够全程保持满功率工作状态,较好地匹配列车再生制动功率曲线;而当储能阵列的Kn增大时,储能阵列以满功率状态工作的时间明显缩短,功率曲线无法有效匹配列车制动功率曲线,储能阵列稳压节能效果下降,且造成了储能阵列容量的浪费。因此,采用带均速控制的飞轮储能阵列控制策略是有必要的。
通过上面的仿真,可以发现,基于转差修正控制和基于“电压—转速—电流”三闭环控制这两种策略,都能满足飞轮储能阵列的功能需求,如工作模式的切换、飞轮单元均速控制、SOC管理等,且两种控制策略性能相差不大。但是从控制的复杂程度来看,采用基于转差修正的控制策略,除了新增加转差修正和SOC管理环节外,还需在飞轮接近转速下限时,引入额外的转速环来维持飞轮的最低转速。而基于“电压—转速—电流”三闭环的控制策略,只需在电压和电流环之间串联转速环即可,结构更为简单。因此,本文采用第二种飞轮储能阵列控制策略,进行实验验证。
4 实验验证
4.1 实验平台
为了验证飞轮储能阵列控制策略的可行性,搭建了1MW飞轮储能阵列实验平台,进行实验验证。实验平台拓扑结构如图17所示,主要包括降压变压器、PWM变流器柜和飞轮储能阵列,其中变压器一次侧连接10kV电网,二次侧连接PWM变流器柜;变流器柜输出端则与飞轮储能阵列母线连接;飞轮储能阵列由三个飞轮储能单元并联组成,额定功率为1MW。图18为飞轮储能阵列实验平台。
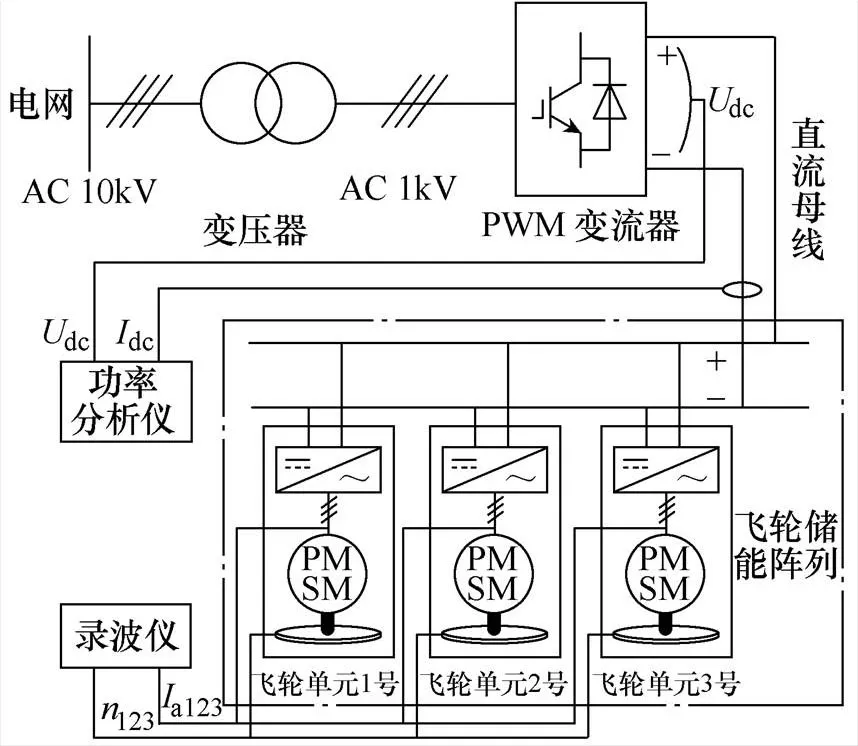
图17 实验平台拓扑结构
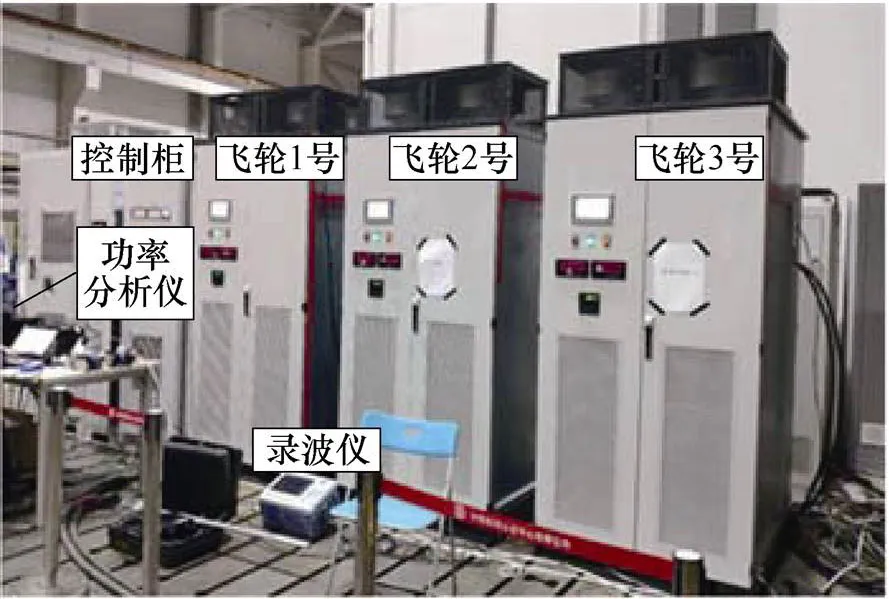
图18 飞轮储能阵列实验平台
实验内容主要包括两个部分:一是控制PWM变流器先后工作于整流和逆变模式,分别模拟列车制动和牵引过程,观察该过程中飞轮储能阵列的状态及直流母线电压dc的情况,验证储能阵列的节能稳压功能;二是调整三个飞轮单元的初始转速,在飞轮单元间存在转速差的情况下进行充电实验,验证储能阵列的均速控制效果。实验平台的参数见表3。
表3 飞轮储能阵列实验平台参数

Tab.3 FESA experimental platform parameters
4.2 实验结果与分析
在实验过程中,受电流、电压传感器的长度限制,利用功率分析仪采集了实验平台直流母线的电压、电流及功率数据,功率分析仪型号为横河WT1800,数据更新周期设置为50ms;而飞轮单元变频器交流侧的a相电流和飞轮单元的转速数据则通过录波仪进行采集,录波仪型号为DL 850,采样率为500kS/s。转速传感器采用了磁阻型转速传感器。
4.2.1 储能阵列模式切换与稳压实验
将PWM变流器设置为一个可控功率源,通过功率指令控制其输出功率,模拟列车制动、靠站停车及牵引工况,验证储能阵列在不同工况下的模式切换与稳压功能。考虑储能阵列的额定功率与有效容量,对模拟的列车功率曲线进行了调整,使其功率峰值不超过1MW,能量不大于6kW·h。储能阵列模式切换与稳压实验波形如图19所示。
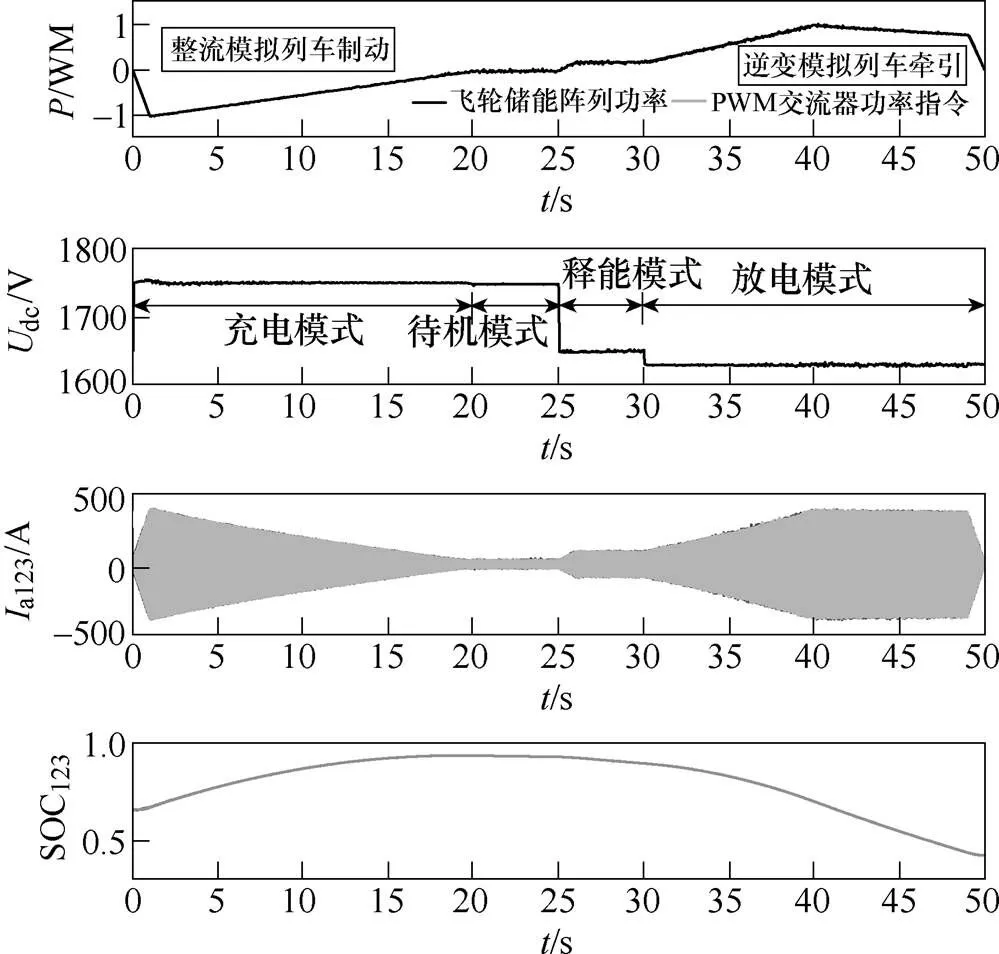
图19 储能阵列模式切换与稳压实验波形
结合功率与直流母线电压波形来看,当PWM变流器工作于整流模式,模拟列车制动工况时,飞轮储能阵列工作于充电模式,回收电能并将直流母线电压稳定在1 750V;当PWM变流器工作于逆变模式,以较小功率模拟列车靠站停车工况下辅助供电系统能耗时,飞轮储能阵列工作于释能模式,将直流母线电压稳定在1 650V;当PWM变流器工作于逆变模式,以较大功率模拟列车牵引工况时,飞轮储能阵列工作于放电模式,将直流母线电压稳定在1 630V。实验过程中,飞轮储能阵列能够准确响应PWM变流器功率的变化切换工作模式,依据设定的多段阈值,实现不同工作模式下的电压稳定。飞轮变频器交流侧电流波形正常,各飞轮单元SOC保持在0.4~1之间。
4.2.2 储能阵列均速实验
将三个飞轮单元的初速度设置为7 000r/min、7 500r/min和8 000r/min,分别在有均速控制和无均速控制的情况下进行实验。由于存在转差时,均速控制会影响储能阵列的输出功率,若PWM变流器仍作为功率源,可能出现PWM变流器输出功率无法完全被储能阵列吸收导致直流母线电压过高的情况。为避免损坏实验平台,将PWM变流器设置为一个可控电压源,输出电压设定为1 800V,储能阵列的充电阈值为1 750V。此时储能阵列电压外环输出满功率充电指令,采用“电压—转速—电流”三闭环控制时,其实际功率还受到均速控制的影响。
飞轮储能阵列均速实验波形如图20所示,无均速控制时(见图20a)飞轮单元间的转差无法消除,三个飞轮满功率工作直至先后充满;有均速控制时(见图20b),转速较高的飞轮单元充电电流受到抑制,当转速趋于一致时三个飞轮单元充电电流保持均衡,储能阵列满功率运行。可见,无均速控制时,飞轮储能阵列无法自主调节飞轮单元间存在的转速差,而这种转差较大时,必然导致部分飞轮率先充满或放完电能,影响储能阵列输出功率;采用基于“电压—转速—电流”三闭环的控制策略时,储能阵列能够主动调整飞轮单元间的转速差,保持飞轮阵列的转速均衡,避免由于转差造成储能阵列容量的浪费。
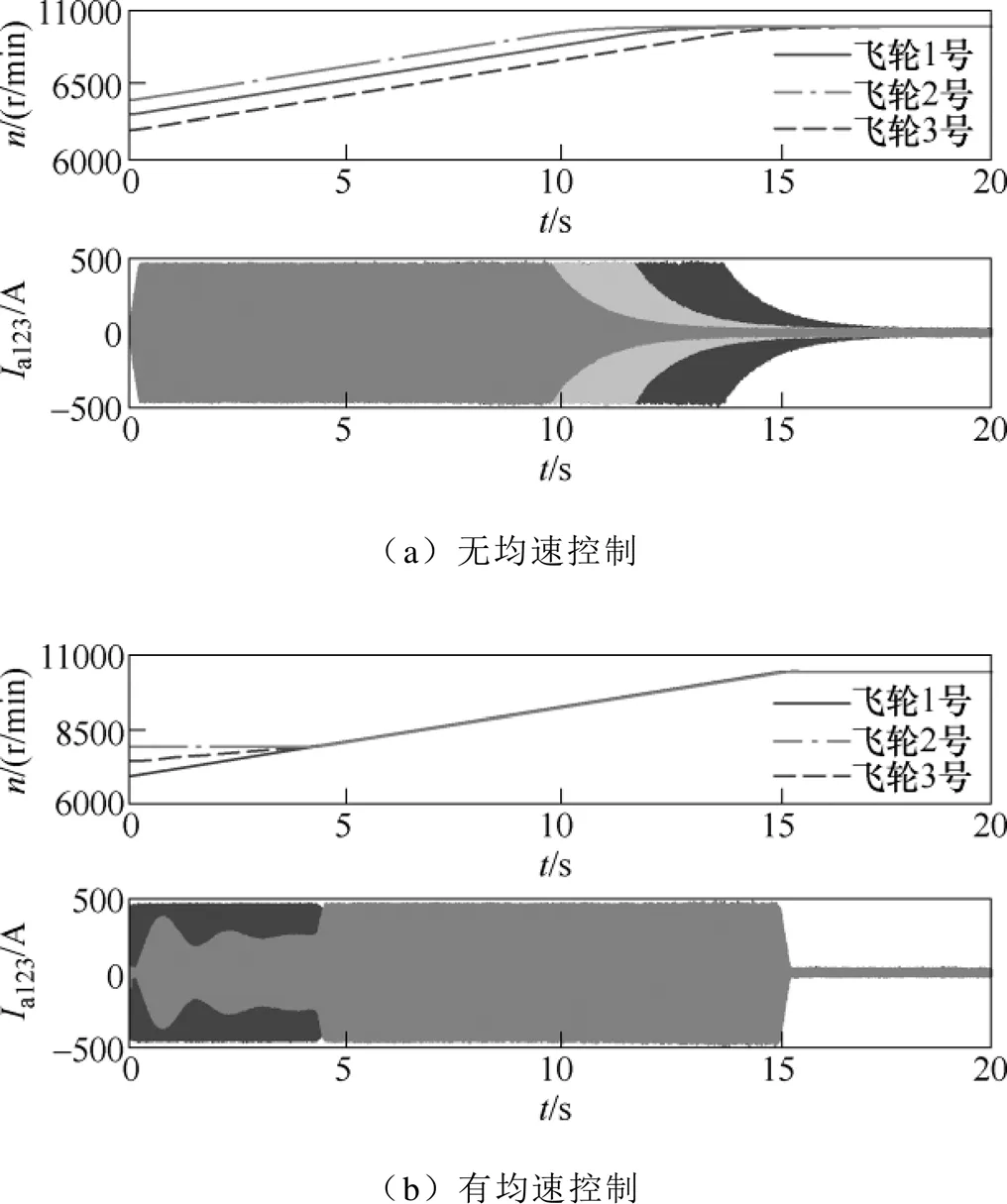
图20 飞轮储能阵列均速实验波形
5 结论
本文以利用飞轮储能系统回收城轨交通再生制动能量为出发点,分析了飞轮储能系统数学模型和运行特性,提出了单飞轮储能系统控制策略。针对单飞轮储能系统容量较小的缺陷,采用飞轮储能阵列的解决办法并提出了飞轮储能阵列控制策略,实现了飞轮储能阵列工作模式切换、飞轮单元转速均衡、SOC能量管理等功能。通过Simulink仿真和实验平台实验,验证了飞轮储能阵列控制策略的可行性。在后续的研究中,将在实际的地铁线路中对飞轮储能阵列的节能稳压及均速效果进行验证,还将对飞轮储能阵列的容量配置做进一步的研究。
[1] 刘爽, 王慧文, 兴妍, 等. 基于案例的城市轨道交通车站能耗定额标准研究[J]. 交通运输系统工程与信息, 2020, 20(4): 231-235.
Liu Shuang, Wang Huiwen, Xing Yan, et al. Research on energy consumption quota standard of urban rail transit station based on cases[J]. Transportation System Engineering and Information, 2020, 20(4): 231-235.
[2] 喻奇. 飞轮储能技术在城市轨道交通的应用[J]. 电气化铁道, 2020, 31(2): 53-57.
Yu Qi. Application of flywheel energy storage tech- nology in urban rail transit[J]. Electrified Railway, 2020, 31(2): 53-57.
[3] Ratniyomchai T, Hillmansen S, Tricoli P. Recent developments and applications of energy storage devices in electrified railways[J]. IET Electrical Systems in Transportation, 2014, 4(1): 9-20.
[4] 杨俭, 李发扬, 宋瑞刚, 等. 城市轨道交通车辆制动能量回收技术现状及研究进展[J]. 铁道学报, 2011, 33(2): 26-33.
Yang Jian, Li Fayang, Song Ruigang, et al. Status and research progress of braking energy recovery technology for urban rail transit vehicles[J]. Journal of the China Railway Society, 2011, 33(2): 26-33.
[5] Vazquez S, Lukic S M, Galvan E, et al. Energy storage systems for transport and grid applications[J]. IEEE Transactions on Industrial Electronics, 2010, 57(12): 3881-3895.
[6] Konishi T, Morimoto H, Aihara T, et al. Fixed energy storage technology applied for DC electrified rail- way[J]. IEEE Transactions on Electrical and Elec- tronic Engineering, 2010, 5(3): 270-277.
[7] 秦强强, 郭婷婷, 林飞, 等. 基于能量转移的城轨交通电池储能系统能量管理和容量配置优化[J]. 电工技术学报, 2019, 34(增刊1): 414-423.
Qin Qiangqiang, Guo Tingting, Lin Fei, et al. Energy management and capacity configuration optimization of urban rail transit battery energy storage system based on energy transfer[J]. Transactions of China Electrotechnical Society, 2019, 34(S1): 414-423.
[8] 诸斐琴, 杨中平, 林飞, 等. 城轨交通牵引供电系统参数与储能系统容量配置综合优化[J]. 电工技术学报, 2019, 34(3): 579-588.
Zhu Feiqin, Yang Zhongping, Lin Fei, et al. Com- prehensive optimization of urban rail transit traction power supply system parameters and energy storage system capacity configuration[J]. Transactions of China Electrotechnical Society, 2019, 34(3): 579-588.
[9] 沈小军, 曹戈. 城轨交通制动能量回收超级电容储能阵列配置方法对比分析[J]. 电工技术学报, 2020, 35(23): 4988-4997.
Shen Xiaojun, Cao Ge. Comparative analysis of configuration methods of super capacitor energy storage array for braking energy recovery in urban rail transit[J]. Transactions of China Electrotechnical Society, 2020, 35(23): 4988-4997.
[10] Richardson M B. Flywheel energy storage system for traction applications[C]//Institution of Engineering and Technology, Bath, United Kingdom, 2002: 275- 279.
[11] 王大杰, 孙振海, 陈鹰, 等. 1MW阵列式飞轮储能系统在城市轨道交通中的应用[J]. 储能科学与技术, 2018, 7(5): 841-846.
Wang Dajie, Sun Zhenhai, Chen Ying, et al. Appli- cation of 1MW array flywheel energy storage system in urban rail transit[J]. Energy Storage Science and Technology, 2018,7(5): 841-846.
[12] Jandura P, Richter A, Ferkova Z. Flywheel energy storage system for city railway[C]//International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Capri, Italy, 2016: 1155-1159.
[13] Khodaparastan M, Dutta O, Mohamed A. Wayside energy storage system for peak demand reduction in electric rail systems[C]//IEEE Industry Applications Society Annual Meeting (IAS), Portland, 2018: 1-5.
[14] Ren Rongjie, Li Yunyu, Yang Yejian, et al. Study on magnetic flywheel energy storage system in urban rail transit[M]. Harbin: IEEE Asia-Pacific Transportation Electrification Conference and Exposition, Harbin, China, 2017.
[15] Zhang Xiang, Yang Jiaqiang. A DC-link voltage fast control strategy for high-speed PMSM/G in flywheel energy storage system[C]//IEEE International Electric Machines and Drives Conference, 2017: 1671-1679.
[16] 赵思锋, 唐英伟, 王赛, 等. 基于飞轮储能技术的城市轨道交通再生能回收控制策略研究[J]. 储能科学与技术, 2018, 7(3): 524-529.
Zhao Sifeng, Tang Yingwei, Wang Sai, et al. Research on control strategy of urban rail transit renewable energy recovery based on flywheel energy storage technology[J]. Energy Storage Science and Technology, 2018, 7(3): 524-529.
[17] 张维煜, 朱熀秋. 飞轮储能关键技术及其发展现状[J]. 电工技术学报, 2011, 26(7): 141-146.
Zhang Weiyu, Zhu Huangqiu. The key technology of flywheel energy storage and its development status[J]. Transactions of the Chinese Society of Electrical Engineering, 2011, 26(7): 141-146.
[18] Shi Changli, Wei Tongzhen, Tang Xisheng, et al. Charging-discharging control strategy for a flywheel array energy storage system based on the equal incremental principle[J]. Energies, 2019, 12(15): 1-6.
[19] Zhou Long, Tang Xisheng, Qi Zhiping. Control method for flywheel array energy storage system in energy harvesting from electric railway[C]//IEEE Transportation Electrification Conference and Exposium, Beijing, China, 2014: 1-5.
[20] Jin Chenhui, Jiang Xinjian, Zhong Guobin, et al. Research on coordinated control strategy of flywheel energy storage array for island microgrid[C]//IEEE Conference on Energy Internet and Energy System Integration, Beijing, China, 2017: 1-6
Control Strategy of Flywheel Energy Storage Array for Urban Rail Transit
1112
(1. School of Electrical Engineering Beijing Jiaotong University Beijing 100044 China 2. Standards and Metrology Institute China Academy of Railway Sciences Group Co. Ltd Beijing 100081 China)
The introduction of a flywheel energy storage system in the urban rail transit power supply system can effectively recover the regenerative braking energy of the train and stabilize the DC catenary voltage. However, the single flywheel energy storage system has a small capacity, and it is difficult to meet the demand for train regenerative braking energy utilization. Flywheel energy storage array is an effective means to solve this problem, however, there are few researches on its control strategy. This paper first analyzed the mathematical model and operating characteristics of the flywheel energy storage system. Then, considering the requirements for voltage stabilization, energy saving and field weakening, a control strategy for a single flywheel energy storage system based on multiple voltage thresholds was given. Subsequently, aiming at the core issues of flywheel array speed-balance control and SOC management, two flywheel energy storage array control strategies based on speed-error regulation control and based on “voltage-speed-current” three closed-loop control were proposed. Finally, the simulation and experiment verify that the proposed control strategy can be arrayed.
Urban rail transit, flywheel energy storage, flywheel energy storage array, regenerative braking
10.19595/j.cnki.1000-6753.tces.210419
TK02
中央高校基本科研业务费专项资金资助项目(2018JBZ004)。
2021-04-19
2021-05-17
李 进 男,1997年生,硕士,研究方向为城市轨道交通飞轮储能技术。E-mail: 19126123@bjtu.edu.cn
张 钢 男,1982年生,副教授,博士生导师,研究方向为轨道交通牵引供电技术、新能源并网与储能技术等。E-mail: gzhang@bjtu.edu.cn(通信作者)
(编辑 陈 诚)
