交叉跑道进离场窗建立方法
2021-12-22王莉莉
王莉莉,阳 杰,钟 灵
(中国民航大学空中交通管理学院,天津,300300)
近年来,随着终端区内运行的航空器种类和数量飞速增长及管制技术和助航设备不断完善,国内机场对于多跑道构型的需求与日俱增。交叉跑道能够灵活应对侧风变化,且占地规模明显小于平行跑道,能够提升跑道利用率,国外机场已有较为成熟的交叉跑道设计和运行经验,而国内机场建设受限于相当有限的空域资源和高昂的土地造价,交叉跑道构型将成为未来国内机场建设的必然趋势。新跑道构型的建设对国内跑道运行模式研究提出了全新难题,故针对航空器在交叉跑道上的运行风险研究具有前瞻性意义。
目前,对跑道运行的碰撞风险研究大多以平行跑道为背景,交叉跑道运行下的研究还处于探索阶段。Guerreirol等[1]运用蒙特卡罗仿真方法,为不同间隔的平行跑道进近时的安全区进行计算;Eftekari等[2]建立模型分析了配对进近时尾流对飞行安全影响的敏感程度;Henry[3]运用蒙特卡罗方法分析不同环境因素下交叉跑道碰撞风险和间隔标准;Houck等[4]利用蒙特卡洛模拟方法对平行跑道同时仪表进近不可预测的飞行故障进行碰撞风险分析;Farrahi等[5]对配对方式进行了较为详细的研究。
在国内,韩松臣等[6]提出了一种航路交叉点处标称距离随时间变化的碰撞风险估计办法;孙宁[7]以成都新机场一期跑道为例,研究了含V型跑道的多跑道机场管制运行方法;徐超等[8]借鉴交叉航路冲突点的建模方法建立了基于冲突点的交叉跑道碰撞风险模型;熊慧敏[9]基于交叉跑道的构型及运行方式,对碰撞风险和跑道容量进行研究,探讨交叉跑道建设的可行性;王莉莉[10]等建立了近距平行跑道构型下进近复飞与离场航空器之间碰撞风险评估模型,给出了到达离场窗的划设方法。
以上碰撞风险研究多集中在不同构型的航路和平行跑道配对进近的场景,一起一降运行的碰撞风险研究较少,且对交叉跑道运行模式和风险控制手段的研究尚有空白。基于此,在文献[10]中近距平行跑道到达离场窗划设的基础上,针对交叉跑道道面直接汇聚或间接汇聚的特性,扩展原进离场窗构型,提出划设交叉跑道冲突全域以规避进离场飞机运行冲突。考虑进近航空器可能出现复飞,在进近发生前预先为离场航空器建立进离场前窗,保障同时复飞离场的安全间隔,将进离场冲突防范于未然;考虑复飞实际发生后直至何时可发布离场航空器的放行许可,增设交叉跑道进离场后窗来保持前机复飞后尾随起飞的航空器与前机的安全间隔。此外还研究跑道交叉角度对3个方向重叠概率及总碰撞风险的影响,通过实例仿真分析,验证模型在未来交叉跑道构型运行模式下对进离场管理的重要作用。
1 交叉跑道冲突全域构型
民航局2019年发布的《关于交叉汇聚跑道管制运行指导材料》的征求意见稿中对含有交叉构型的跑道进行了详细的分类定义,交叉(汇聚)跑道分为交叉跑道、穿越跑道、非交叉汇聚跑道和非交叉发散跑道4种构型[9]。非交叉汇聚跑道(开口V型跑道)的运行方式与交叉跑道类似,本文将直接汇聚交叉跑道和开口V型跑道视为交叉跑道的2种不同构型,统称为交叉跑道。
关于交叉跑道离场放行的规定可以参考美国联邦航空局FAA的AIP PART II-ENR1.1[11]文件,AIP文件中只提出根据进离场航空器机型不同组合需要保持2~3 min的雷达尾流间隔,如图1所示。而对于离场航空器的管制间隔文件中缺乏明确条款的规定。

图1 交叉跑道离场尾流间隔要求
从实际运行发现,目前交叉跑道运行冲突主要集中于相关运行模式下进场航空器出现复飞时与离场航空器的冲突,而现有规章的空缺使得交叉跑道运行大多依靠管制经验以保安全,飞机的安全间隔是否满足运行要求缺乏一定的理论研究和实践验证。据此,以位置误差概率模型聚焦交叉跑道进离场窗的划设,将进离场窗分为前窗和后窗,前窗划设在进近跑道前端,指在进近发生前认为航空器存在复飞的可能性,一旦进近的飞机进入前窗,则不允许管制员发布另一条跑道飞机离场的许可,避免出现起飞航空器已得到离场许可而进近航空器目视参考建立失败必须执行复飞,两架航空器之间由于起始速度的差异很有可能会出现的追赶超越。进离场后窗划设于跑道交叉点后,是指未能成功进近而实际发生复飞时,还未离开进离场后窗之前,要求另一条跑道离场飞机继续等待,意义在于复飞实际发生的前提下,复飞飞机与另一条跑道上起飞飞机保持安全间隔。交叉跑道冲突全域即为前窗与后窗的结合,两种交叉跑道构型的冲突全域如图2所示。
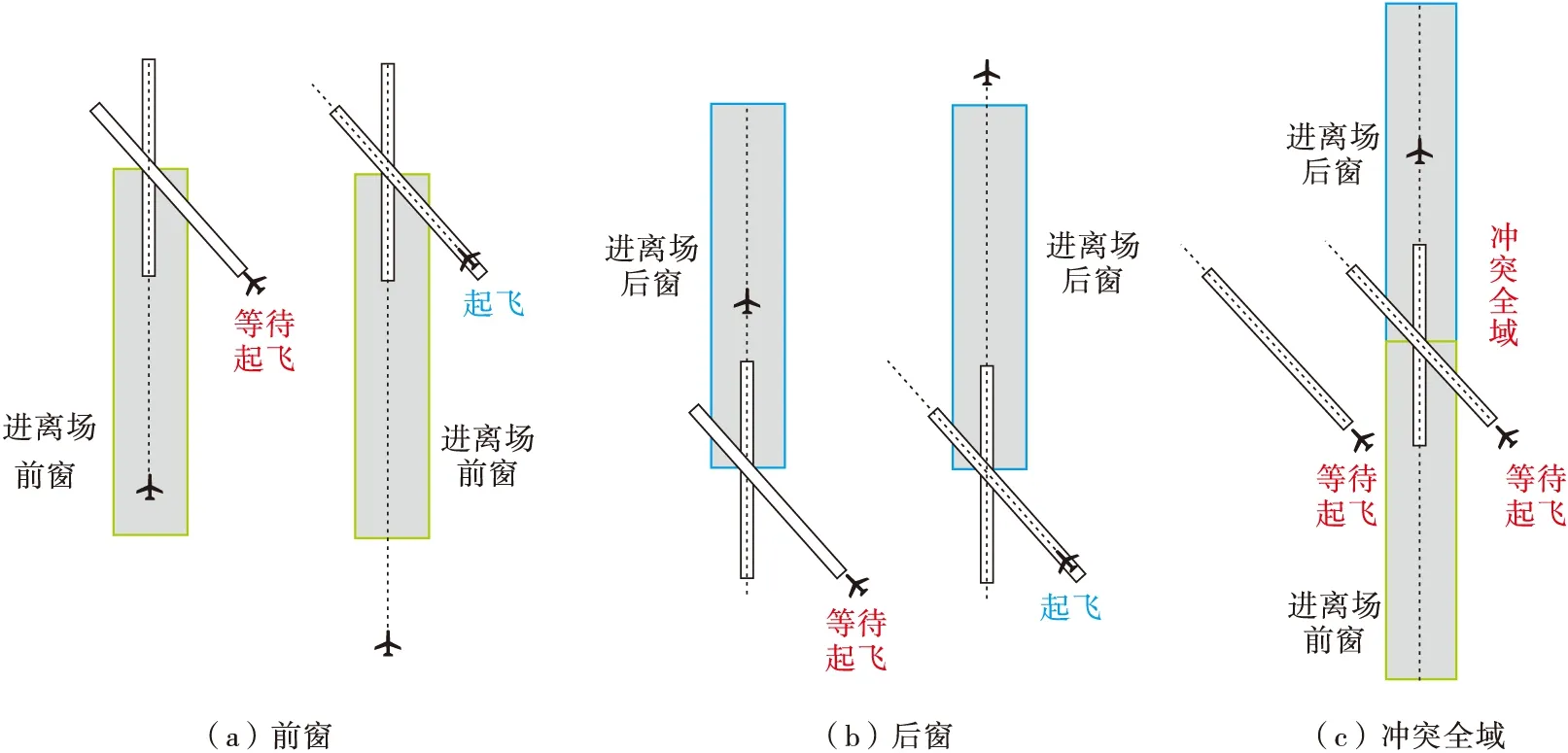
图2 交叉跑道进离场冲突全域
2 交叉跑道进离场窗计算模型
2.1 位置误差碰撞风险评估模型
航空器碰撞风险大小主要是由航空器之间实际的距离决定,由于跑道运行可以直观推测航空器大致运动趋势,为了分析不同时刻碰撞风险的动态变化过程,采用能够直观展示两机之间相对位置关系的位置误差概率评估方法,分析同时进离场的碰撞风险,判断两机碰撞风险是否满足最低安全目标水平的要求。
碰撞风险模型一般从侧向、纵向和垂直3个方向研究。根据飞行程序设计中坐标系的规定,取进近方向为x轴即侧向,垂直进近方向为y轴即纵向,垂直地面为z轴即垂直方向。
对于侧向碰撞风险,2架飞机侧向位置误差服从正态分布,对两机之间动态相对距离的概率密度函数积分,可得不同时刻下飞机之间碰撞发生概率,两机在t时刻侧向、纵向和垂直方向碰撞概率Px(t)、Py(t)、Pz(t)计算公式参考现有的位置误差概率模型[12]。

设N为每小时跑道容量,则总碰撞风险Rc(x)为:
Rc(x)=2NPx(t)Py(t)Pz(t)
(1)
因此需求解两机之间随时间变化的动态相对距离Lx(t)、Ly(t)、Lz(t)来计算碰撞风险。
2.2 冲突全域前窗碰撞风险评估模型
依据AIP文件中交叉跑道复飞必须保持航向爬升到指定点或指定高度的要求,建立交叉跑道2种构型冲突全域前窗的进近复飞与离场风险评估模型,如图3所示。

图3 交叉跑道冲突全域前窗风险评估模型
模型假设:
1)进近航空器经过五边调速后拥有近似相同的着陆基准速度;
2)复飞点MAPt点的起始高度为决断高度;
3)离场航空器起飞后保持航向至安全离场。
模型相关参数如下:跑道交叉角度α,以进近跑道为参考,沿进近方向两条跑道入口处侧向间距Sx、垂直于进近方向纵向间距Sy,进离场窗前端航空器速度vx,进近航空器结束五边调速时着陆基准速度vREF,着陆基准段长度M,五边加速度a11,五边下降梯度tanθ,复飞爬升点SOC,到达SOC点处速度为vA,复飞航空器加速度a12,到达指定点或指定高处速度VM,复飞爬升梯度tanZ,起飞航空器滑跑段加速度a21,起飞航空器离地速度vlof,起飞爬升段加速度为a22,最后起飞速度为vFTO,起飞爬升梯度tanω。
交叉跑道相关运行模式下同时进近离场的全部运动过程,是指从进场航空器在五边进近调速阶段某处开始进近,此时离场航空器在另一跑道端准备起飞,直至进场航空器执行复飞程序后到达指定点或起飞航空器拉升至指定高度或指定点完成安全离场。由于交叉跑道道面直接汇聚或非交叉汇聚对两机实际位置的影响在于纵向相对位置的不同,因此分别建立两种构型下的纵向理论距离方程,若跑道构型为直接汇聚交叉,则取Ly1,反之取Ly2。由于进离场窗起始位置未知,航空器运动阶段需进行如下分类讨论:

(2)

(3)
此后两者相对位置关系相同,可根据运动阶段划分如下:
(4)

2.3 冲突全域后窗碰撞风险评估模型
交叉跑道相关运行模式下同时复飞离场的全部运动过程,是指从进近航空器从跑道端开始复飞,离场航空器得到放行许可开始在跑道上滑行开始,直至进场航空器到达复飞指定点或起飞航空器安全离场。考虑极端情况,即进近飞机直至跑道端头才执行复飞程序,这种情况下要保证起飞航空器安全离场必须等到复飞航空器飞到足够远才能避免两者的互相影响。建立交叉跑道冲突全域后窗风险评估模型,如图4所示。

图4 交叉跑道冲突全域后窗风险评估模型
后窗终点位置速度设为vD,其他模型参数意义同2.2节中相关参数,由于进离场后窗终止位置不确定,划定后窗的关键手法即为确定vD的大小,对此建立随时间t变化的位置预测方程。
当离场飞机开始在跑道上滑行,可以推断复飞航空器一定已经进入加速爬升段,据此可建立两者侧向、纵向及垂直方向上相对位置关系如下:
(5)

2.4 进离场窗范围的计算方法
根据AIP文件中“起飞航空器必须在进近航空器过交叉点之后才可发布放行许可”的规定,将直接交叉汇聚和非交叉汇聚跑道前后窗分界点分别取在跑道交叉点和跑道中点处;由于进场航空器一般都能获得方向引导,进离场窗的宽度选取航向台10 km处的波束宽度约为1.8 km。
以前窗为例,由于进离场前窗范围主要取决于起始位置,为求解进离场前窗起始位置设计了递进式评估算法,如图5所示。
具体步骤如下:
1)沿跑道中线延长线取足够远处任一风险可接受位置作为初始可行位置。
2)以该位置作为可行区间起始位置,取跑道交叉点作为终止位置,最终前窗范围一定是可行区间的子集。
3)二分初始可行区间,以可行区间中点位置为试验点,计算从中点位置进离场航空器同时进近起飞的碰撞风险Rc(x)是否满足最低安全目标水平Rc=5×10-9。
4)如若风险值满足要求,则前窗起始位置依然处于中点值至跑道交叉点区间内;如若不满足,则可以确定区间中点至跑道交叉点是无效区间,需进一步扩大可行区间,取无效区间中点为新可行区间起点。
5)定义差值Δ=Rc-Rc(x),经过步骤3)和步骤4)的迭代计算后,跑道中线延长线上某点处最终满足lim Δ=0+,则进离场窗起始位置最终划定。
6)输出进离场前窗长度与同时进近复飞离场的碰撞风险总风险值。
3 算例仿真
由于国内目前没有投入使用的直接交叉汇聚跑道,因此选取国内成都天府机场的开口V型跑道和国外典型的多跑道构型机场美国威奇托机场进行仿真分析。天府机场20号跑道与11号跑道可视为非交叉汇聚跑道,其中11号侧向跑道运行只允许东向离场,威奇托机场14号与19R号跑道是道面直接交汇的交叉跑道构型。结合上文建立的碰撞风险模型,对天府机场相关运行模式下20号与11号跑道和威奇托机场相关运行模式下14号与19R号跑道建立进离场冲突全域。
两机场交叉跑道的基本数据和波音737-800的各项性能参数如表1所示,模型中各阶段速度及加速度由全空域仿真系统TAAM获得,XSOC由飞行程序设计计算所得,其中Sx1和Sy1、Sx2和Sy2、α1和α2、HDA1和HDA2分别为威奇托机场和天府机场两条跑道入口处侧向间距、纵向间距、交叉角度和决断高度。

表1 模型计算参数取值
3.1 前窗重叠概率结果分析
根据上文位置误差重叠概率模型及递进式评估算法,反复缩小可行区间,直至某位置处碰撞风险概率逼近最低安全目标水平,最终确定天府机场冲突全域前窗起始位置位于20号跑道入口前11.89 km处,终止位置为跑道中点处,威奇托机场进离场前窗起始位置位于14号跑道入口前10.93 km处,终止位置为两跑道交叉点处。侧向、纵向和垂直重叠概率及总碰撞风险仿真结果如图5所示。


图5 冲突全域前窗临界位置碰撞风险概率
天府机场20号跑道南向进近复飞与11号跑道东向离场和威奇托机场14号跑道进近复飞与19R跑道离场过程均可大致推测为:进近航空器逐渐降低高度接近跑道入口处随后直线拉起复飞,同时离场航空器加速滑跑离场。此过程中两机侧向相对距离先减小后增大,故两机场侧向重叠概率逐渐增大分别在130 s和110 s前后出现峰值,随后减小。由于天府机场前窗距离较威奇托机场大,故天府机场侧向重叠概率峰值出现时间较威奇托机场晚。纵向上,由于天府机场两跑道未直接交叉,两机相对距离一直增大故纵向重叠概率逐渐降低,而威奇托机场两跑到直接汇聚交叉,纵向上两机相对距离先减小后一直增大,故纵向重叠概率先增大后逐渐就减小。垂直方向上两机在两机场起始相对运动时均有一定的高度差,进离场过程使高度差值先减小随后增大,因此垂直方向重叠概率均先增大后减小,与侧向重叠概率相同,天府机场纵向重叠概率峰值出现时间较威奇托机场晚。两架航空器在两机场的进近复飞与离场整个过程中总体碰撞风险经过3个方向的重叠概率叠加后均呈现先增大后减小的趋势,天府机场总碰撞风险峰值为4.983 9×10-9次/飞行小时,威奇托机场总碰撞风险概率峰值为4.831 9×10-9次/飞行小时。
为了研究碰撞风险值与跑道交叉角度的关系,可以从不同角度下两机各个方向的相对距离Lx(t)、Ly(t)、Lz(t)的动态变化进而推断碰撞风险的演变过程。以天府机场开口V型跑道组交叉角度为90°时20号跑道南向运行的11.89 km的安全间隔为衡量依据,取跑道交叉角度20°~90°,每5°为步长,判断进离场两机在3个方向的相对距离随交叉角度变化的关系,仿真计算结果如图6所示。

图6 天府机场开口V型跑道进离场飞机3个方向相对距离与跑道交叉角度对应关系
由图6可以推断,天府机场离场安全间隔取为固定的11.89 km时,跑道交叉角度的变化对于3个方向相对距离的影响各不相同,最显而易见的是垂直方向的两机相对距离Lz(t)并不受跑道交叉角度的影响。当跑道交叉角度由90°逐渐减小时,意味着纵向两跑道逐渐靠近,因而两机纵向距离Ly(t)随着交叉角度的减小而减小。而两机侧向距离Lx(t)的变化趋势受交叉角度的影响最大,当进离场飞机对初始保持11.89 km的距离时,在90°~80°范围内两机侧向距离减小至0随后增大,意味着两机侧向上出现追赶,而两机侧向距离随着交叉角度的减小出现了显著的变化,交叉角度为45°时两机之间几乎始终保持着接近6 km的距离不出现追赶,这一距离随着交叉角度的减小逐渐增大,这意味着交叉角度的减小对于两机侧向相对位置关系有正面的影响。
总碰撞风险与跑道交叉汇聚角度关系如图7所示,需要强调的是由于11号跑道只支持东向离场,跑道交叉角度与进离场同时运行的风险峰值成正比关系,这是由于交叉角度对于侧向距离增大影响的程度远超过纵向距离的减小量,因此该结论在两条跑道东南方向运行时成立。

图7 跑道交叉汇聚角度与总碰撞风险
各跑道汇聚角度与总碰撞风险峰值的对应关系如表2所示。

表2 跑道交叉汇聚角度与总风险峰值对应关系
3.2 后窗重叠概率结果分析
交叉跑道冲突全域后窗的算法与前窗类似,故不再赘述计算过程。两机场从前窗终止处复飞航空器与离场航空器同时运行的侧向、纵向和垂直重叠概率及总碰撞风险仿真结果如图8所示。


图8 冲突全域后窗临界位置碰撞风险概率
侧向上,复飞航空器离开前窗时已具有相当的速度且拉开了一定的距离,此后两机侧向距离不断增大,因此侧向重叠概率均呈现从峰值逐渐递减的规律;纵向上,由于天府机场两条跑道未直接交叉,复飞航空器与起飞航空器之间纵向距离逐渐增大,纵向重叠概率逐渐减小,而威奇托机场19R跑道上起飞航空器会不断接近交叉点然后逐渐远离,因此两机纵向相对距离先减小至零随后增加,纵向重叠概率呈现先增加后减小的趋势;垂直方向上,两机场离场航空器在跑道上有滑跑段而复飞航空器离开后窗后有一定高度差且保持爬升,故垂直相对距离先增大,虽然起飞爬升梯度大于复飞爬升梯度,但垂直方向上并没有出现追赶只出现增长趋势变缓,相应的垂直重叠概率降低的坡度也随后变缓。2架航空器在两机场同时复飞与离场整个过程中总体碰撞风险概率均呈现从峰值逐渐递减的趋势,此时天府机场进离场后窗的范围在20号跑道入口后6.44 km,总碰撞风险概率峰值为4.989 3×10-9次/飞行小时,威奇托机场进离场后窗的范围在14号跑道入口后6.85 km,总碰撞风险概率峰值为4.481 8×10-9次/飞行小时。
因此成都天府机场20号跑道南向进近复飞与11号跑道东向离场运行以及威奇托机场14号跑道进近复飞与19R跑道离场运行划设的冲突全域的范围据此划定,即天府机场前窗起始位置位于离20号跑道入口前11.89 km处,终止于跑道中点处,后窗起始位置于20号跑道中点处,终止于跑道中线延长线方向上6.44 km处,威奇托机场前窗起始位置位于离14号跑道入口前10.93 km处,终止于两跑道交叉点处,后窗起始位置于19R号跑道交叉处,终止于跑道中线延长线方向上6.85 km处。需要另外分析的是,第1节提到交叉跑道对于进离场的尾流间隔约束中时间间隔,本文提出的进离场前后窗为距离间隔的概念,因而建议将进离窗前窗取为距离较大的11.89 km和10.93 km,后窗由于距离较短可以取为尾流间隔的2 min。综上,根据本文提出的碰撞风险模型可以构成完整的成都天府机场20号跑道进近复飞与11号跑道离场以及威奇托机场14号跑道进近复飞19R号跑道离场相关运行模式的交叉跑道冲突全域。
4 结语
对交叉跑道进离场窗进行了扩展,考虑了复飞实际发生后直至何时可发布离场航空器的放行许可,设置了交叉跑道进离场窗来保持复飞航空器与后机离场航空器的安全间隔,由前后窗共同组成交叉跑道冲突全域,使起飞航空器无论在进近发生前或是复飞发生后都能够摆脱相关运行下间隔冲突问题。
以成都天府机场和美国威奇托机场为例进行仿真分析,结果表明天府机场冲突全域的范围为进近跑道入口前11.89 km至入口后6.44 km,威奇托机场冲突全域的范围为进近跑道入口前10.93 km至入口后6.85 km。证明了模型在未来交叉跑道程序设计时提高运行效率的重要作用。
分析了跑道交叉角度对于进离场碰撞风险的影响,由于天府机场11号跑道只允许东向离场,未来如若运行上增加了西向离场,跑道交叉角度可以作为进离场窗范围影响因素之一进行后续研究。
