基于Fuzzy ART聚类的卫星在轨姿态监测系统设计
2021-12-22于千贺
郑 颖 ,张 伟,靳 新,于千贺
(1.沈阳工学院 信息与控制学院,辽宁 抚顺 113122; 2.沈阳工学院 人工智能研究所,辽宁 抚顺 113122; 3.东软医疗系统股份有限公司,沈阳 110021)
0 引言
长时间运行后,同步卫星的姿态相对于初始姿态会发生变化,而地面卫星的天线则指向初始预定的位置,从而造成通信中断[1]。大多数卫星天线是抛物形,与信号的频率和孔径成反比,孔径越大,工作频率越高,主瓣越窄,风能很容易地将直径较大的天线从卫星上移走[2]。另外,这种天线会偏离预定的方向,使天线的方向系数和效率的乘积大大降低,从而造成通信和信息传输中断,这就需要一套能够无人操纵的自动监测系统来监测这类卫星的轨道姿态[3]。以往使用基于大数据分析的卫星在轨姿态仿真监测系统,把模拟结果和卫星在轨数据结合起来,可以直接用于在轨控制系统的性能评估,为在轨故障诊断和应急预案演练提供方便。但因为卫星在境内运行时间短,要求仿真分析及时、可靠;使用全物理仿真监测系统,综合分析轨道环境、卫星结构参数和姿态确定算法,确定最佳的参数配置和系统方案,对于硬件接入情况,对系统性能进行了全面测试和技术评估。尽管该系统可靠、灵活、直观,操作性强,但在发生突发故障情况下,监测结果不准确。面对上述传统系统存在的问题,提出了基于FuzzyART聚类的卫星在轨姿态监测系统设计。结合FuzzyART自组织聚类算法,在面对突发故障情况下,通过将输入向量和网络双向连接后,达到精准监测的目的。
1 总体架构设计
卫星在轨姿态监测系统由仿真电脑和可选择的存取硬件组成,系统组成结构如图1所示。
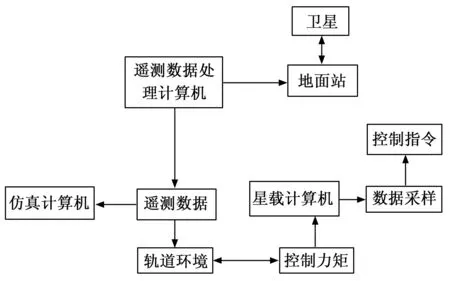
图1 总体架构框图
如图1所示,仿真计算机是整个系统的核心,其扩展接口支持对整个卫星姿态控制系统或轨道上卫星遥测数据进行访问,可根据需要扩展系统工作模式。卫星在轨姿态监测需要模拟计算机处理卫星遥测数据,就硬件而言,在轨卫星通过通信链路与仿真系统相连[4]。卫星遥测数据一般是由专门地面站接收,然后传送到测控站;将 UDP标准网络协议传输到仿真计算机,实现了对在轨姿态三维动态演示或同步仿真验证。在软件方面,使用FuzzyART聚类方法对人脑认知过程仿真,当聚类和分类大量复杂数据时,通过识别和比较网络输入矢量和双向连接权值,可以实现共振,完成自记忆,实现在轨卫星姿态的回收[5]。
2 系统硬件结构设计
卫星在轨姿态监测系统由姿态监测单元、电机驱动单元、主控制单元和监控单元四部分组成,如图2所示。
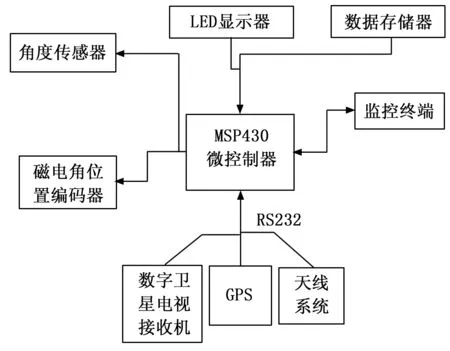
图2 系统硬件结构
由图2可知,当执行在轨姿态监测装置时,将采集的姿态信息传送到主控制装置。通过主控单元控制方位角和俯仰角,利用驱动装置发送控制命令,驱动步进电机运行,并实时记录方位角和俯仰角[6]。天线驱动单元根据在轨卫星的姿态信息,实现了天线姿态监测模块的扁平化,隔离了载波干扰,保证了天线与卫星的对准。监控装置负责实时监控卫星的姿态,并发出相应控制指令[7]。
2.1 MSP430微控制器
MSP430 (MCU)是以简化的指令集处理器为基础的16位微控制器,在晶片内设有模数转换器及模数转换器,使其既能接收与输出数字信号,又能接收与输出模拟信号[8]。
1)MCU的 CPU模块通过存储器地址总线、数据总线、程序存储模块、数据存储模块以及各种外部设备模块,统一使用CPU指令和寻址方式[9]。
2)由MSP430微控制器产生所需的各种时钟信号,它可以在多种时钟源的支持下工作,包括加入一个外部晶体的高频稳定时钟源,而不接入任何外部器件。采用自编程序控制时钟模块的工作状态和频率,使微控制器能够利用等待状态下的低频时钟信号,甚至关闭时钟电路,降低了系统能耗[10]。
3)对运行中高频时钟信号进行加速信号处理,MSP430微控制器每一组装配指令对应于一个逻辑电路模块,MSP430微控制器依靠运行程序完成工作。该控制器是由设计人员向单片机发出的一组指令,指令指示单片机在操作中调用逻辑电路模块,使指令以二进制代码形式存储在内存中。单片机每次从内存中读出一个指令码,并完成指令码相关指定操作[11]。
2.2 磁角位置编码器
磁角位置编码器是一种利用电磁原理将机械几何位移转换为电子信号(脉冲或数据信号)的机械与电子紧密结合的精密测量装置。该编码器采用磁电角编码器,具有抗震、抗腐蚀、抗污染、可靠性高、结构简单等优点。AS5145B是一种无触点的,高精度,高分辨率的磁旋转编码器,测量范围为0~360°。磁角位置编码器是一个集成了线性霍尔元件环形阵列,模拟前端,数字信号处理器的完整芯片系统[12]。
通过使用由线霍尔元件组成的环形阵列来检测晶片外场,线霍尔元件在环A阵列上可以感觉到放置在晶片上的磁体场强,并且可以为每块磁体施加电压,从而改变每块磁体的磁场。正向曲线电压落在环形线性霍尔单元阵上,由模拟前端放大,数据串或脉冲信号经数字信号处理器处理后输出[13]。
2.3 在轨姿态模块电磁罗盘电路
内存处理器HMC6352具有用户校准功能,用户可以通过相关命令进入校准模式。使用标定装置时,要求使用者至少转动罗盘一次,以确保罗盘在各个方向都能采集数据。为了提高航向数据的重复性,在罗经上需要进行平滑旋转。最好在20 s内连续转两圈,使校准更加精确。在没有外界磁场干扰的情况下,电子罗盘水平、垂直与重力方向的精度最高[14]。
使用双轴磁传感器HMC6352,供电电压为2.5~5.0 V,可测磁场范围为0.1~0.7高斯,定向精度为2.0°。使用HMC6352航向模式时,该罗盘电路通过I2C总线输出数据,并且两个字节是二进制格式。HMC6352供电电压为3.0 V,罗盘HMC6352外围电路如图3所示。

图3 罗盘HMC6352外围电路
由图3可知,当磁场感应线穿过霍尔元件时,产生的电动势加载在I2C上,并且脚6电位高于脚5和脚7,通过改变霍尔元件与地平面的倾斜角,就可通过该电路找出卫星在轨姿态大致方向[15]。
2.4 传感器
角传感器是用于检测轴线的,与轴线配合。角传感器在与 RCX连接时,计数轴是1/16。沿着某一方向旋转可增加计数,但如果改变旋转方向,则计数将减少。计数与角传感器的初始位置有关,罗盘下面安装有霍尔传感器,负责控制转向角。下位机模块为ESP电子控制单元,为系统提供罗盘转动方向、角度、速度等信号;由传感器测得的方位角是从中心点的北线顺时针向目标线的水平角,属于双面角;俯仰角是子午圆面和经过该物体的水平圆面之间夹角。用顺时针方向测量子午圆的方位角,也可以用来测量俯仰角[16]。
3 系统软件部分设计
3.1 监控终端串行发送与接收流程
监控终端串行的发送流程,如图4所示。

图4 监控终端串行发送流程
由图4可知,监控终端的发送方式以终端发送为主,先与计算机完成第一次数据传输,此时单片串口通讯完成初始化后,将接触信号传送到上位机;监控终端与计算机完成第二次数据传输,保证了数据传输可靠性。在交换信息之后,以中断情况下发送的数据为判断依据,根据上述判断结果,确认数据,并判断 PC执行过程是否有误。如果发生错误,则必须按要求重新发送[17]。
监控终端的串行接收程序具有几种不同功能的标志位,00H表示接收到的触点信号标志位;01H表示接收的字节数目标志位;02H表示接收到的数据标志位;03H表示接收端的标志位。监控终端可以直接接收数据,电脑所传送的指令资料可依此操作,在数据传输完成之后,接收字节数,并确认数据,使用该方法能够保护数据。一旦数据传输出现错误,那么该错误就会返回给PC主机,并按规定重新传输数据[18]。
3.2 基于FuzzyART聚类监测流程设计
结合Fuzzy ART聚类特点及输出层特性,监测卫星在轨姿态,其流程如下所示:
step1:对时序数据进行模糊聚类分析,聚类系统正常状态下特征向量,并将正常模式向量用网络输出节点的数目表示出来。
对卫星在轨姿态监测数据进行聚类分析,得到对应的等价矩阵,获取唯一确定种类。当聚类结果在一定范围内变化时,可得到聚类论域,根据卫星动态运行环境确定聚类中心,如下所示:
(1)
式(1)中,c表示卫星在轨姿态分类数;n表示卫星在轨姿态样本数;yi表示卫星在轨姿态样本平均值;y0表示全体样本平均值。
step2:在监测过程中,通过FuzzyART聚类判定卫星在轨姿态向量与正常向量匹配度。
令D表示聚类论域中的数目,α表示卫星在轨姿态分类数c中的数目,则近似度可表示为:
(2)
根据近似度,即警戒参数,构建测试标准,判断卫星在轨姿态向量与正常向量匹配度是否满足警戒参数,设警戒层为χ,警戒测试可表示为:
Sim>χ,警戒测试通过
Sim≤χ,警戒测试失败
(3)
step3:若任意输出节点的状态向量与正常模式向量相匹配,则表明系统处于正常工作状态;如果不完全匹配,则表明系统工作状态异常。系统能够根据警戒测试结果,自动打开网络中的新节点,存储异常状态矢量的特征数据,并给出报警信息。
4 系统调试
系统调试目的主要是验证基于FuzzyART聚类的卫星在轨姿态监测系统设计合理性。
4.1 系统调试环境
调用STK中三维可视化场景,直观演示卫星在轨运行情况,演示结果如图5所示。
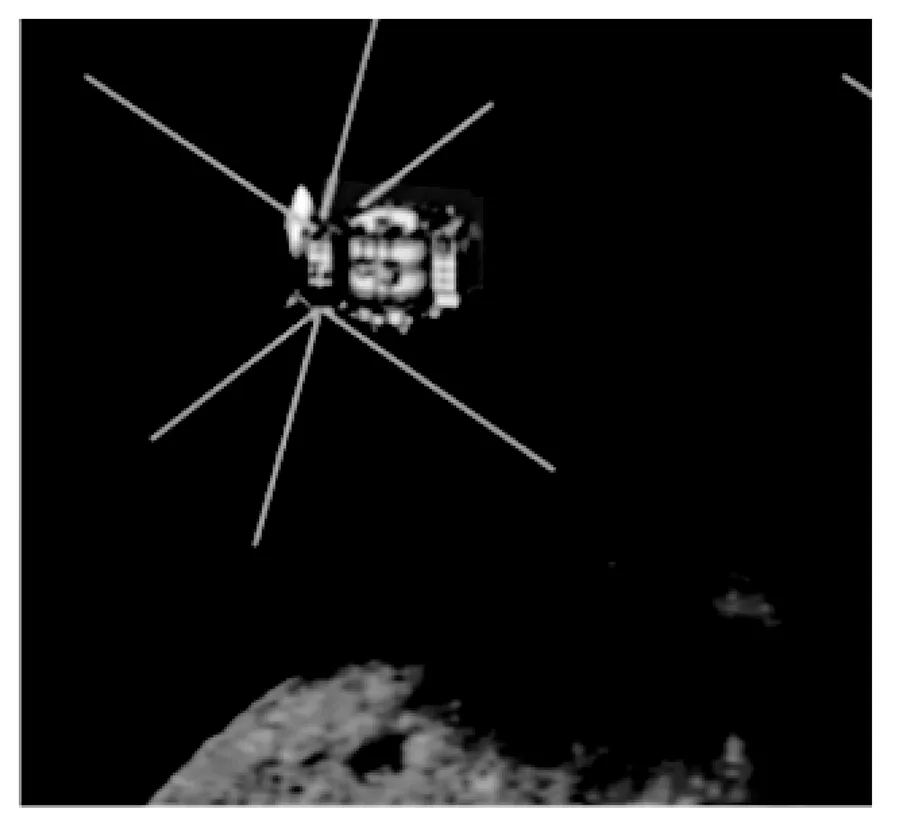
图5 卫星在轨状态运行演示结果
4.2 速率阻尼仿真分析
卫星在初始角速度为[1,1,1]°/s条件下,用时2.0轨完成初始卫星在轨姿态消旋,角速度稳定在±0.3°/s内。卫星在轨的俯仰角和方位角三维角度显示结果如图6所示。
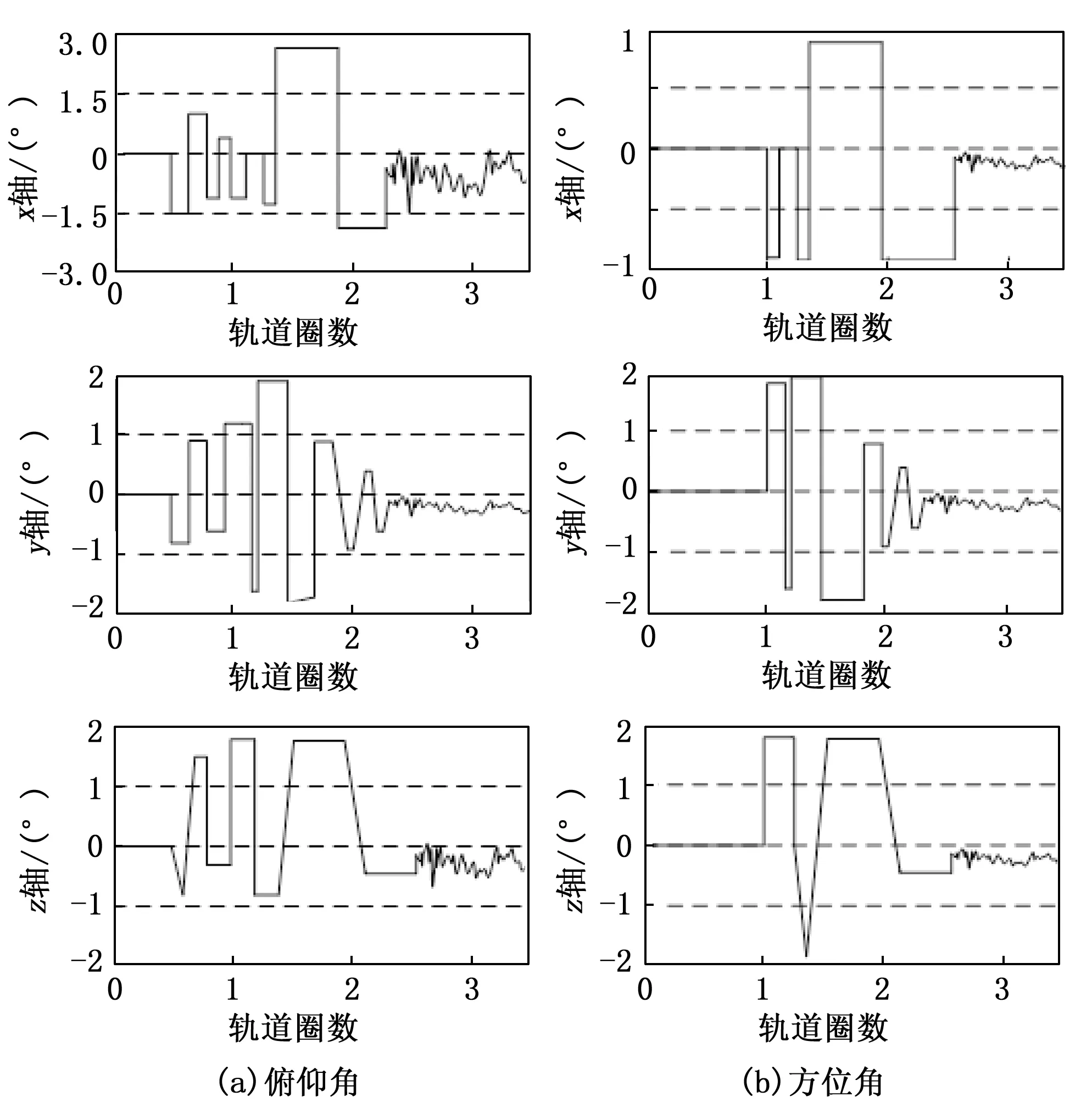
图6 卫星在轨的三维角度显示结果
由图6可知,采用磁矩控制,三轴控制磁矩在阻尼过程中均以最大值输出,施加控制力矩,能够迅速使姿态达到稳定。当角速率稳定后,切换至反作用轮组,由该轮组施加控制力矩。实验结果表明所设计系统能够较好地控制卫星速率阻尼,在动量轮参与控制下姿态捕获速度更快,初态控制时间更少,监测效率较好。
4.3 系统调试结果
分别使用基于大数据分析的监测系统、全物理仿真监测系统和基于FuzzyART聚类监测系统监测卫星在轨俯仰角和方位角,监测结果如图7所示。

图7 不同系统俯仰角和方位角监测结果对比分析
由图7可知,使用基于大数据分析的监测系统、全物理仿真监测系统俯仰角和方位角与卫星在轨的三维角度显示结果差别较大,而使用基于FuzzyART聚类监测系统俯仰角和方位角与卫星在轨的三维角度显示结果基本一致,仅在轨道圈数为2圈时,z轴方向的俯仰角与实际三维角度显示结果存在一定偏差,导致整体角度偏大1°。通过上述分析结果可知,该系统对仰角和方位角的监测误差较小,监测结果更加精准,能够对卫星在轨姿态做出准确监测。
5 结束语
设计的基于FuzzyART聚类的卫星在轨姿态监测系统,成本低、操作简单。可以实时监测在轨姿态,为卫星运行提供帮助。结合FuzzyART聚类监测原理,设计监测流程。通过STK仿真调试,支持三维动态演示,且由实验结果可知,该系统监测到的卫星在轨俯仰角和方位角与实际运行姿态一致,具有精准监测效果。
由于研究条件有限,所设计的卫星姿态控制方面还有待进一步深入探索,为了方便应急预案的实施,应建立应急预案分析系统,增加自动生成预案案例的功能,形成完整的卫星地面协同模拟控制回路。