日地L1点探测任务设计与结果分析
2021-12-21邹乐洋高珊赵晨乔德治李晓光孟占峰
邹乐洋,高珊,赵晨,乔德治,李晓光,孟占峰
1. 北京空间飞行器总体设计部,北京 100094 2. 上海宇航系统工程研究所,上海 201109 3. 北京控制工程研究所,北京 100080
1 引言
日地L1点具有器-地-日相对位置关系较为固定、能源条件稳定、测控通信连续性好、轨道维持速度增量需求小等特点,是开展太阳观测任务的理想观测点。目前国际上已实施的日地L1点探测任务包括欧美合作的ISEE-3任务和SOHO任务、美国的Wind任务和Ace任务等[1],中国正在论证的“夸父”任务也选择日地L1点开展太阳观测任务。
日地L1点对于我国后续太阳观测任务具有重大意义。我国目前尚未实施过日地L1点探测任务,对日地L1点的轨道设计、测控链路环境、太阳辐照环境、三体动力学环境、空间辐射环境等方面的研究缺少在轨实际飞行数据的支撑,因此,开展一次日地L1点飞行验证任务,获得在轨实测结果,对于支撑我国后续太阳观测任务设计与实施具有重要意义。
在嫦娥五号任务的既定目标全部实现后,利用轨道器能力和剩余推进剂,在拓展任务阶段设计并实施了我国首次日地L1点探测,对日地L1点李萨茹轨道(Lissajous orbit)特性以及日地L1点的测控链路环境、太阳辐照环境等飞行环境进行了探测,对太阳翼挠性动力学参数设计、环境力扰动影响和工业级元器件在空间辐照环境下的工作性能进行了实际飞行验证,为我国未来太阳观测等深空探测任务的设计提供在轨实际飞行数据。
本文对日地L1点探测任务的设计与结果分析情况进行介绍,总结我国首次日地L1点探测任务的技术成果,为未来深空探测任务设计提供参考。
2 日地L1点探测实施过程
嫦娥五号轨道器在2020年12月17日与返回器分离后,通过规避机动和轨道入射机动进入了日地L1点转移轨道,开始实施拓展任务。轨道器经过约3个月的转移轨道飞行,期间执行了2次中途修正,于2021年3月15日到达日地L1点,进入环绕日地L1点运行的李萨茹轨道。轨道器在日地L1点环绕期间完成了日地L1点李萨茹轨道飞行试验、日地L1点飞行环境试验、太阳翼挠性在轨辨识试验、光学相机成像试验等试验项目,试验结果正常,获取了预期的试验数据。日地L1点探测实施过程的关键事件如表1所示。

表1 日地L1点探测实施过程关键事件
3 日地L1点探测设计
嫦娥五号拓展任务的主要目的是获取在轨飞行试验数据,为未来深空探测任务和产品的设计提供参考。在拓展任务设计中,避免与嫦娥二号、嫦娥五号飞行试验器等拓展任务目标发生重复[2-5],获得更多全新的探测结果。因此,选择了我国之前从未开展过探测活动的日地L1点作为嫦娥五号拓展任务的探测目标。嫦娥五号拓展任务的具体内容包括:
1)验证日地L1点(距离地球约1.5×106km)转移轨道的设计与控制技术;
2)在日地L1点附近开展环绕飞行任务,验证L1点环绕轨道设计与控制技术;
3)对日地L1点附近测控链路、太阳辐照、三体动力学、空间辐射等飞行环境进行监测,获取实际在轨飞行数据。
3.1 日地L1点李萨茹轨道飞行试验
日地L1点李萨茹轨道飞行试验的目的是通过设计并实施日地L1点转移和环绕飞行,验证轨道设计和轨道控制策略的正确性、可行性。具体飞行过程可划分为以下两个阶段:
1)地球-日地L1点转移段。此阶段从轨道器规避机动后开始,至达到日地L1点附近过日地L1点旋转坐标系XOZ面为止。规避机动后2 h实施一次转移轨道入射机动,目的是通过一次变轨使轨道器进入飞往日地L1点的转移轨道,进入飞往日地L1点的稳定流形,轨道器飞行约90 d到达日地L1点附近(第一次过日地L1点旋转坐标系XOZ面),直接进入环绕L1点的李萨茹轨道。
2)日地L1点环绕飞行段。轨道器第一次过日地L1点旋转坐标系XOZ面后即进入环绕日地L1点的李萨茹轨道运行,一圈周期约为180 d,每半圈(约3个月)安排一次轨道维持,轨道器在该轨道上运行并开展相关的验证试验任务。
(1)日地L1点转移轨道设计
从地球出发的日地平动点转移轨道设计主要考虑地球、月球、太阳的引力以及其它大天体的三体引力,此外还应考虑太阳光压的影响。转移轨道的设计采用数值方法[3],根据嫦娥五号轨道器规避机动完成后的轨道参数,通过一次变轨控制调整出发速度来满足轨道器到达平动点时的速度需求。
定义初始状态为轨道器的出发速度矢量v0:
p=v0
(1)
将终端状态矩阵定义为:
q=v1x
(2)
式中:v1x为轨道器第一次到达日地L1点旋转坐标系XOZ面时刻相对旋转坐标系X方向的速度大小,目标值为0。日地L1旋转坐标系的定义为:原点在日地L1点,X轴始终沿太阳指向地球方向,Z轴沿地球公转平面法线方向,Y轴和Z轴、X轴构成右手螺旋坐标系。
根据初始状态与终端状态间的关系q=q(p),两者的误差关系可线性化表达为:
(3)
利用上述关系,通过若干次迭代即可获得满足第一次过XOZ面时刻速度需求的轨道器初始出发速度。再以该初始出发状态作为下一步迭代的初值,采用相同方法求解满足轨道器第二次到达日地L1点旋转坐标系XOZ面时刻,相对旋转坐标系X方向的速度大小v1x=0的初始状态,以此类推,计算至第五次过旋转坐标系XOZ面时刻停止[3]。
利用上述方法计算获得轨道器入射进入转移轨道所需的速度增量。轨道器在完成规避机动后2 h,通过补充实施一次转移轨道入射机动,即可进入飞往日地L1点的稳定流形。轨道器飞行约90 d到达日地L1点附近(第一次过日地L1点旋转坐标系XOZ面),进入环绕L1点的李萨茹轨道。在转移轨道飞行过程中安排了三次中途修正,第一次安排在规避后约10 h,用于修正规避控制残差;第二次安排在规避机动后约40 d,用于消除前一次修正的残差;第三次安排在第一次过日地L1点旋转坐标系XOZ面时,用于消除前一次修正的残差,保证进入李萨茹轨道后的稳定性[6-8]。
中途修正策略均为通过调整轨控速度增量的三方向分量瞄准控后第五次过日地L1点旋转坐标系XOZ面时的X向速度为零。
(2)日地L1点李萨茹轨道设计
在圆限制性三体问题下,共线平动点附近的轨道运行一般表达为:
(4)
式中:x、y和z分别为探测器在旋转坐标系下的三方向位置分量;Ax和Az分别表示平动点轨道在旋转坐标系下x向和z向的轨道振幅;λ为x向振动频率;ν为z向振动频率;Φ和φ为振动的初始相位。
考虑到进入Halo轨道相比李萨茹轨道需要消耗更多的推进剂,同时拓展任务轨道本身没有特定的构形要求,因此在轨道设计中选择了经过稳定流形到达后自然形成的李萨茹轨道作为使命轨道。
轨道器第一次过日地L1点旋转坐标系XOZ面后即进入环绕日地L1点的李萨茹轨道运行,一圈周期约为180 d,每半圈(约3个月)安排一次轨道维持,维持策略为通过调整轨控速度增量的三方向分量瞄准控后第五次过日地L1点旋转坐标系XOZ面时的X向速度为零。轨道器可在该轨道上运行一圈或数圈,开展相关的探测任务[9]。
日地L1点探测的飞行轨迹如图1所示,李萨茹轨道各向振幅如图2所示。李萨茹轨道X方向振幅约4.5×105km、Y方向振幅约1.4×106km、Z方向振幅约1.5×105km。

图1 日地L1点探测飞行轨迹Fig.1 Flight trajectory of Sun-Earth L1 point exploration
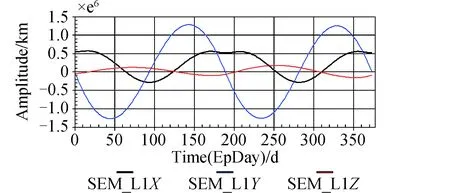
图2 日地L1点李萨茹轨道各向振幅Fig.2 The orbit amplitude on each direction of the Lissajous orbit around the Sun-Earth L1 point
3.2 日地L1点飞行环境探测
日地L1点飞行环境探测的主要目的是通过日地L1点环绕飞行,对日地L1点附近的测控链路环境、太阳辐照环境等飞行环境进行探测与验证。
在测控链路环境探测与验证方面,主要通过日地L1点飞行期间的长期测控跟踪,验证日地L1点飞行环境条件下的测控链路性能,通过低SEP角(即太阳-地球-探测器夹角,一般认为SEP角低于5°时会发生日凌现象,太阳噪声影响地面接收下行信号)条件下的测控跟踪以及择机开展高码速率模式下行试验,验证测控链路对日地L1点飞行环境的适应性。
在太阳辐照环境探测与验证方面,主要使用太阳翼输出电流作为太阳辐照强度的表征,将日地L1点环绕飞行期间实际太阳翼输出电流的变化情况与基于日地距离变化的日地因子模型的预示结果进行比对,验证日地因子模型的正确性。
3.3 三体动力学环境探测
日地L1点是太阳-地球的引力平动点,绕日地L1点的飞行环境是典型的三体动力学环境。在日地L1点探测期间,设计了太阳翼挠性在轨辨识试验,并通过动量轮角动量累积情况对太阳光压等环境力产生的姿态扰动情况进行了探测。
轨道器以三轴稳定控制模式在轨运行,巡航期间主要使用动量轮实现高精度姿态维持,而周期性的动量轮控制会激发太阳翼挠性振动,成为影响姿态维持精度的主要因素之一。由于地面试验时存在重力影响,难以真实模拟在轨力学环境,因此很难通过地面试验获得真实的太阳翼挠性振动数据,一般采用仿真分析的方式获得相关参数,用于控制系统参数设计[10-11]。利用日地L1点三体动力学环境的失重、天体引力场作用稳定、引力梯度影响小等特点,设计了太阳翼挠性在轨辨识试验,通过修改动量轮控制参数主动激发轨道器太阳翼挠性振动,根据轨道器整器姿态角速度变化情况反演0°、315°、270°等不同太阳翼转角下的太阳翼挠性振动情况,实现太阳翼的动力学阻尼特性在轨辨识。
另一方面,在三轴稳定控制条件下,太阳光压等环境力产生的姿态扰动力矩是通过动量轮加速转动产生的控制力矩进行抵消的,因此姿态扰动力矩的作用可以由动量轮角动量累积情况进行表征。通过对动量轮角动量累积情况进行分析,可以对环境力产生的姿态扰动情况进行探测。
3.4 日地L1点辐射环境对工业元器件影响试验
轨道器配备的2台光学相机(分别为宽视场监视摄像机和监视传感器B)为实现轻小型化设计使用了部分工业级元器件。为验证工业级元器件在日地L1点辐射环境下的工作性能[12-13],设计了日地L1点辐射环境对工业元器件影响试验,使用2台光学相机实施地月合影拍摄、太阳拍摄和太阳翼状态图像监视[14]。
4 日地L1点探测结果分析
4.1 日地L1点李萨茹轨道飞行试验
日地L1点李萨茹轨道飞行试验期间共实施了1次轨道入射机动、2次转移轨道中途修正(设计中的第3次中途修正因速度增量极小而取消)和1次李萨茹轨道维持,各次轨控的控制参数如表2所示。

表2 日地L1点李萨茹轨道飞行试验轨道控制参数
根据实际飞行获得的定轨数据,对日地L1点的飞行情况进行了外推分析,李萨茹轨道的各向位置振幅偏差结果见图3~图5,图中的历元时刻为轨道器到达日地L1点时刻。
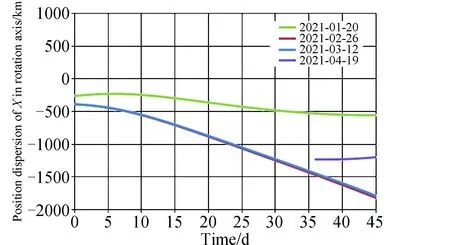
图3 旋转坐标系X向位置偏差Fig.3 Position deviation in the X direction of rotating coordinate system
由图3~图5可以看出,在日地L1点环绕飞行期间,与李萨茹轨道X方向设计振幅约4.5×105km,Y方向设计振幅约1.4×106km,Z方向设计振幅约1.5×105km相比,实际飞行的李萨茹轨道在日地旋转坐标系X向和Y向的位置偏差均不超过2 000 km,Z向偏差不超过200 km,各向位置的相对偏差不到0.5%,与设计的一致性良好,天体引力、太阳光压等环境力的作用符合预期。

图4 旋转坐标系Y向位置偏差Fig.4 Position deviation in the Y direction of rotating coordinate system

图5 旋转坐标系Z向位置偏差Fig.5 Position deviation in the Z direction of rotating coordinate system
4.2 日地L1点飞行环境探测
(1)测控链路环境探测与验证
嫦娥五号轨道器上测控系统总接收功率由式(5)给出:
EIRP|g+LTP+LSP|u+La+LP+
(5)

式(5)中,除EIRP|g和LSP|u两项外,其它项均不受轨道器运行位置的影响。轨道器运行于月球轨道和日地L1点两处的接收功率不同,是由于EIRP|g和LSP|u两项造成的。其中:
LSP|u=20lgR+20lgfup+32.44
(6)
式中:R为轨道器和地面天线之间的距离(km);fup为上行载波频率(MHz)[15]。经计算,器地距离为4.0×105km和1.5×106km时,LSP|u分别为221.7 dB和233.2 dB,即轨道器运行至日地L1点时,空间损失较月球轨道增加了11.5 dB。作为补偿,地面站提高了上行功率,日地L1点探测期间的有效发射功率EIRP|g比环月期间增加了18 dB。综合考虑EIRP|g和LSP|u两项,由上述公式计算得到的轨道器运行于日地L1点处的接收功率应比月球轨道高6.5 dB。实际飞行数据分析结果表明,轨道器环月飞行阶段的应答机接收通道信号强度约为-104~-108 dBm,日地L1点探测期间应答机接收通道信号强度约为-100 dBm,比环月飞行阶段高出4~8 dB,实际飞行结果与理论计算结果基本相符,存在误差是由于器上接收天线增益随方位角不同有一定波动。
日地L1点飞行期间SEP角变化情况如图6所示,在一圈环绕轨道飞行过程中,SEP角变化范围为0°~50°。日地L1点飞行期间,地面站对轨道器进行了测控跟踪。轨道器接收地面站上行信号正常,应答机接收通道信号强度高于-108 dBm,高于解调门限-128 dBm,地面站对轨道器上行跟踪锁定正常。地面站接收轨道器下行信号正常,在低SEP角(低于5°)条件下下行信号接收正常。日地L1点飞行期间开展了高码速率模式下行试验,地面站能够正常接收轨道器下行数据,表明测控链路性能能够支持日地L1点飞行环境下的测控通信,为我国未来日地L1点探测任务测控链路设计提供了在轨实际飞行数据。

图6 日地L1点飞行期间SEP角变化情况Fig.6 Variation of SEP angle during the flight around the Sun-Earth L1 point
(2)太阳辐照环境探测与验证
嫦娥五号轨道器太阳翼输出电流采用式(7)计算:
I=I0×Xs×Ns×[βp×(T-25℃)+1]×S
(7)
其中,I0为标准条件下测试电流值,Xs为太阳季节性变化因子,Ns为电池片并联数,βp为温度系数,T为温度,S为单片电池片有效面积。式(7)中,除Xs外,其余参数为能源系统自身的设计值,I0为按照地球附近平均太阳常数对地面测试结果进行修正后获得的基准电流值。在地月系统实施探测任务的探测器的能源系统设计中,太阳常数一般取平均值,即1 353 W/m2,由于地月距离相比日地距离为小量,因此一般不考虑Xs受探测器与太阳之间的距离变化的影响。对于日地L1点探测任务,器地距离约为1.5×106km,距离变化对Xs造成的影响不可忽略,同时,由于日地距离的季节性变化,Xs也相应季节性变化,在能源系统设计中需要加以考虑[16-17]。
根据Xs与日地距离之间的反比关系建立了日地因子模型,如式(8)所示,其中XsL1为日地L1点处的太阳季节性变化因子,L0为太阳与地球的平均距离,LL1为日地L1点探测期间太阳与探测器之间的距离。根据模型修正后的太阳季节性变化因子对太阳翼输出电流进行了理论计算,并将太阳翼输出电流的预示值与实际在轨飞行的实测值进行了比较,如图7所示。模型预示值与实测值之间的最大偏差约为2.5%,表明日地因子模型对于日地L1点的太阳辐照环境具有良好的预示作用,能够应用于未来日地L1点探测任务的能源系统设计。
XsL1=Xs×L0/LL1

图7 太阳翼输出电流预示值与实测值比较Fig.7 Comparison between the predictive value and the measured value of solar array output current
4.3 三体动力学环境探测
(1)太阳翼挠性在轨辨识试验
在太阳翼挠性在轨辨识试验中,注入高带宽动量轮控制参数后,轨道器偏航方向姿态角速度震荡幅值从小于0.000 3(°)/s增加至最大0.012(°)/s,说明太阳翼内弯模态被动量轮控制激发。观察20 min后将太阳翼转至315°转角位置,观察到滚动和偏航姿态角速度均出现小于0.01(°)/s幅值的震荡,说明太阳翼内弯模态同时对滚动方向和偏航方向的姿态造成耦合影响。再观察20 min后,将太阳翼转至270°转角位置,观察到滚动姿态角速度出现震荡,说明太阳翼内弯模态对滚动方向姿态造成影响。再过20 min后,将太阳翼转回0°转角位置,并恢复低带宽动量轮控制参数,观察到偏航姿态角速度震荡幅值逐渐减小趋于收敛,整器姿态角速度恢复至小于0.000 3(°)/s,说明太阳翼内弯模态振动趋于收敛。试验过程中的本体角速度震荡情况如图8所示。
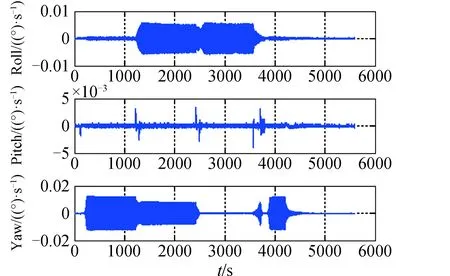
图8 试验过程中轨道器三轴姿态角速度震荡情况Fig.8 The vibration of angular velocity in three axis on the orbiter during the test
通过对注入低带宽参数后的系统响应进行分析,对太阳翼振动的真实阻尼比进行了评估。结果表明,太阳翼阻尼比介于0.002~0.005之间,且与太阳翼振幅正相关。
(2)环境力姿态扰动情况探测
嫦娥五号轨道器在日地L1点飞行期间,受到的环境力主要包括大天体引力和太阳光压,环境力作用对轨道器产生姿态扰动力矩,由动量轮加速转动产生的控制力矩抵消。日地L1点是太阳和地球之间的引力平动点,引力场稳定,引力梯度造成的姿态扰动较小,可以忽略,主要的扰动力是太阳光压。
太阳光压主要作用在太阳翼上,压心可近似为太阳翼的几何中心。由于轨道器自身存在质心偏移,因此会产生姿态干扰力矩,可以通过轨道器动量轮角动量累积情况进行表征。轨道器配备了4台动量轮,其中包括3台与轨道器坐标系方向相同的正交动量轮和1台斜装动量轮。如图9所示,实际在轨飞行数据表明,角动量累积主要发生在轨道器-Y方向,角动量累计周期约为2周,与预期结果一致。

图9 动量轮角动量累积情况Fig.9 The angular momentum accumulation of the momentum wheels
4.4 日地L1点辐射环境对工业元器件影响试验
2021年4月15日,使用宽视场监视摄像机和监视传感器B完成了地月合影拍摄、太阳拍摄和太阳翼挠性在轨辨识试验过程中的太阳翼状态监视。
试验获得的图像数据质量良好,图像显示清晰,表明使用了工业级元器件的光学相机在日地L1点辐射环境下工作状态正常。试验过程图像如图10~图12所示。

图10 宽视场监视摄像机拍摄的地月合影图像Fig.10 Group photo of the Earth and the Moon taken by wide-field camera
图11 宽视场监视摄像机拍摄的太阳图像Fig.11 Photo of the Sun taken by wide-field camera

图12 监视传感器B拍摄的太阳翼图像Fig.12 Photo of the solar array taken by monitoring camera B
5 结论
充分利用嫦娥五号轨道器平台能力和剩余推进剂,设计并实施了中国首次日地L1点探测任务,完成了日地L1点李萨茹轨道飞行试验、日地L1点飞行环境探测、三体动力学环境探测以及日地L1点辐射环境对工业元器件影响试验等项目,获取了大量技术成果,进一步丰富了嫦娥五号任务的成果产出,对于中国未来深空探测任务的设计具有重要参考价值。通过日地L1点探测的设计与实施,主要获得了以下技术成果:
1)实现了中国首次日地L1点环绕探测,验证了日地L1点转移轨道、环绕轨道设计与控制技术,获得了日地L1点轨道演化特性数据,环绕轨道实际飞行振幅与设计值相比偏差不超过0.5%,与设计的一致性良好,天体引力、太阳光压等环境力的作用符合预期,可以作为未来日地L1点探测任务的参考。
2)实现了对日地L1点测控链路环境、太阳辐照环境等飞行环境的就位探测,获取了在轨实测数据,测控系统实际接收增益与理论计算值基本一致,太阳翼输出电流实测值与模型预测值之间偏差不超过2.5%,为中国未来日地L1点探测任务的测控系统、能源系统设计提供了重要参考。
3)实现了三体动力学环境探测,完成了太阳翼挠性动力学参数在轨辨识和环境力姿态扰动情况探测,试验结果与仿真分析结果基本匹配一致,在未来深空探测器动力学分析与建模、控制系统参数设计中具有较高的参考价值。
4)实现了工业级元器件在日地L1点辐射环境下的成功应用,验证了工业级图像传感器等元器件在日地L1点空间辐射环境下的工作性能,对未来深空探测器的设备轻小型、长寿命设计以及低成本空间产品开发有重要借鉴意义。
