深空探测器在轨推力器参数辨识方法
2021-12-21信思博赵训友郑艺裕李绿萍
信思博,赵训友,郑艺裕,李绿萍
上海卫星工程研究所,上海 200240
1 引言
中国火星探测器天问一号于2020年7月23日发射,随后进入地火转移轨道。不同于常规地球高轨卫星,天问一号探测器仅需不到一周时间完成变轨,在接下来的任务飞行中,需经历中途修正、近火制动捕获、环火轨道调整和保持、器器分离等变轨流程[1-2],涉及推进系统多次工作,其状态的稳定与健康与否直接决定任务的成败。此外,地面需根据推力大小、方向偏差、燃料比冲等参数制定轨控策略,其实际工作参数的稳定直接影响策略的制定和修正,因此通过在轨参数辨识,分析推力大小、推力方向、整器质心等参数尤为必要[3-6]。例如日本的隼鸟号小行星探测器利用飞轮转速变化识别出霍尔推力器故障,采取了相应的补救措施[7],避免了航天器完全失效。
通常在轨推进系统参数标定主要依靠测定轨结果反算推力器产生的冲量。该方法主要针对主发动机的参数标定,可以根据点火时长遥测标定出推力大小和推力方向。而姿控推力器由于推力过小,难以对轨道产生较大影响,因而无法标定。此外,地面还常常根据轨控期间管路压力变化,估算发动机推力,但该方法严重依赖发动机地面试车结果,当卫星在轨的管路温度、空间外热流等环境发生变化时,通常该方法无法准确反映发动机推力特性。文献[8-9]用递推最小二乘法对航天器质心参数进行标定,进而推算出推力器推力大小。缺点是需要建立在空间干扰力矩是伪随机的条件下,保证多组推力器的喷气时长尽可能接近,减少系统误差。文献[10]以连续小推力航天器为背景,提出了综合考虑星载加速度计和推力器在轨标定的自主导航方案,但需要长期的轨道变化数据做反演迭代。此外还需建立高精度的引力场模型,在深空环境下各天体的引力摄动极为微弱,太阳系内大天体的引力场建模难以达到迭代需求。文献[11]描述了嫦娥一号探测器的在轨标定方法,在任务中使用了控前和控后的精密轨道数据以及加速度遥测,对沉底、轨控过程的速度增量进行了测量,同时对加速度计的刻度因数等参数进行了标定。另外将测量数据迭代进下一次轨控策略计算中,以提高控制精度,取得了良好的效果。该方法的缺陷是需要地面测定轨精度直接影响标定精度,在深空探测领域随着航天器飞行距离越来越远,测定轨精度逐步下降,发动机标定精度也随之变差。文献[12]针对一种海洋测高卫星质心测量的需求,提出了一种更符合工程实际情况的在轨估计卫星质心的改进算法,综合考虑了实际推力器推力误差及陀螺仪的测量误差,采用总体最小二乘法求解,克服了以往算法不能适应实际工程中存在推力误差的缺陷,具有一定的理论和工程实用价值。
针对深空任务的特殊性,探测器在飞行过程中通常需进行多次点火用于变轨、减速刹车等动作,在此过程中整器质心发生剧烈变化,发动机推力参数严重影响变轨精度。且深空探测器飞行距离远,轨道定位精度差,常规地球卫星依靠的测定轨的标定方法在此无法适用。深空环境下温度、光照处于时变状态,无法为探测器提供稳定的推进管路工作环境,因此也无法通过上一次的点火标定结果预测后续的推力器工作性能[13-15]。在深空环境下航天器的推进系统参数需依靠自身相关遥测进行辨识。
2 质心和推力矢量估计算法
火星探测器在地火转移阶段正常飞行时保持对日姿态,由于此时已远离地月系统,重力梯度和气动力矩微乎其微,空间环境中仅有光压力矩作用于航天器上。在对日姿态基准下探测器惯性姿态角一天仅变化不到0.2°,因此短期内可认为探测器保持惯性姿态,且空间干扰力矩为常值。探测器通过周期性的喷气卸载减少干扰力矩累积,每次卸载时满足姿态动力学方程[16]。
(1)
式中:Tp为喷气力矩;Te为空间干扰力矩;HB和Hw分别为整器和飞轮的角动量。火星探测器在卸载前后的稳定状态下,整器惯性姿态角速度变化极小,忽略不计,主要由飞轮对角动量进行吸收,由此可根据飞轮转速变化直接得到外力矩产生的角动量:
(2)
探测器保持对日固定姿态,空间干扰力矩短期内近似常值,可通过稳态时飞轮转速变化曲线进行拟合,斜率即为干扰力矩幅值。由此解出每次喷气卸载产生的角动量[17]。
喷气卸载力矩为:
Tp=(rp-r0)×Fp
(3)
式中:rp为推力器喉部坐标;r0为探测器在轨质心坐标;Fp为推力器推力矢量。推力器喉部坐标根据整器布局可事先确定,整器质心和推力矢量为求解目标参数。根据各组推力器工作时角动量的不同变化,组成方程组联合求解参数。
3 推力器布局
探测器的环绕器部分共安装了1台3 000 N发动机和6组标称推力25 N的姿控推力器,用于飞行过程中轨道调整以及角动量卸载等操作。在卫星底板-x面布置了4组姿控推力器,用于Y、Z轴控制,另外2组布置在环绕器+Z侧控制X轴,推力器布局和局部坐标系定义如图1所示。

图1 推力器布局示意Fig.1 Layout diagram of thrusters
每组推力器包含2个喷嘴,安装在同一个支架上,考虑到2个喷嘴距离较近且采用了共基准安装,空间外部热环境状态接近,可认为二者的推力方向产生相同方向的偏差。推力器坐标系到卫星本体系的标称安装矩阵用Cbp表示。由式(3)可知,推力器每次喷气可得3组等式,质心坐标为未知量,用3个参数表示坐标值。同样的方式,推力矢量在空间中用推力大小|F0|、推力横向角度偏差θ、推力纵向角度偏差φ三个参数表示。因此每个推力器喷气用含6个未知参数的3个等式表示:
(4)
由于在轨飞行过程中各推力器每次喷气受管路压力、温度、电磁阀阀芯运动特性等因素影响,推力大小存在一定波动,每次产生的喷气冲量不完全相同,上式中参数推力大小|F0|为喷气脉冲的平均推力。
显然单个推力器喷气得到的解算方程组,待求解参数数量大于线性方程数量,无法得到有效解析解。使用安装在同一个支架上的2个推力器喷气数据时,得到6个方程,待求解参数包括质心坐标(3个参数)、推力角度偏差(横向和纵向偏差2个参数)、推力大小(A和B推力器推力大小2个参数),共7个。以此类推,使用3组推力器数据时,可得到18个方程,而由于质心参数相同,待求解参数只有15个,因此可得到有效的解析数值。
第m个推力器喷气产生的姿态扰动动力学方程为:
(5)
当标称推力方向与坐标轴平行时,在该坐标轴方向上的质心坐标的解算方程易出现奇异,造成解析精度不高。为保证解析精度,选取的参与计算的3组推力器,至少有1组不与坐标轴重合。
4 在轨数据验证
采用中国首颗火星探测器天问一号在巡航段的喷气卸载数据进行分析。此时探测器距地球超过3×106km,并且尚未到达火星影响球,空间外力矩仅有光压力矩。姿态保持对日巡航姿态,姿态角速度变化极小,在数天的时间尺度内可以视作惯性姿态,是研究空间光压力矩的理想测试平台。
表1给出了探测器6组推力器喉部的坐标以及标称推力矢量,即式(4)(5)中的参数rp。

表1 推力器布局参数
根据布局关系,Y轴、Z轴推力器装在底面,标称安装矩阵Cbp为单位阵。X轴推力器装在侧面,根据布局关系可知正负两组推力器安装矩阵为:
选取2020年8月的6次不同推力器的喷气卸载数据,喷气前后三轴飞轮转速的变化情况如图2~图7所示。
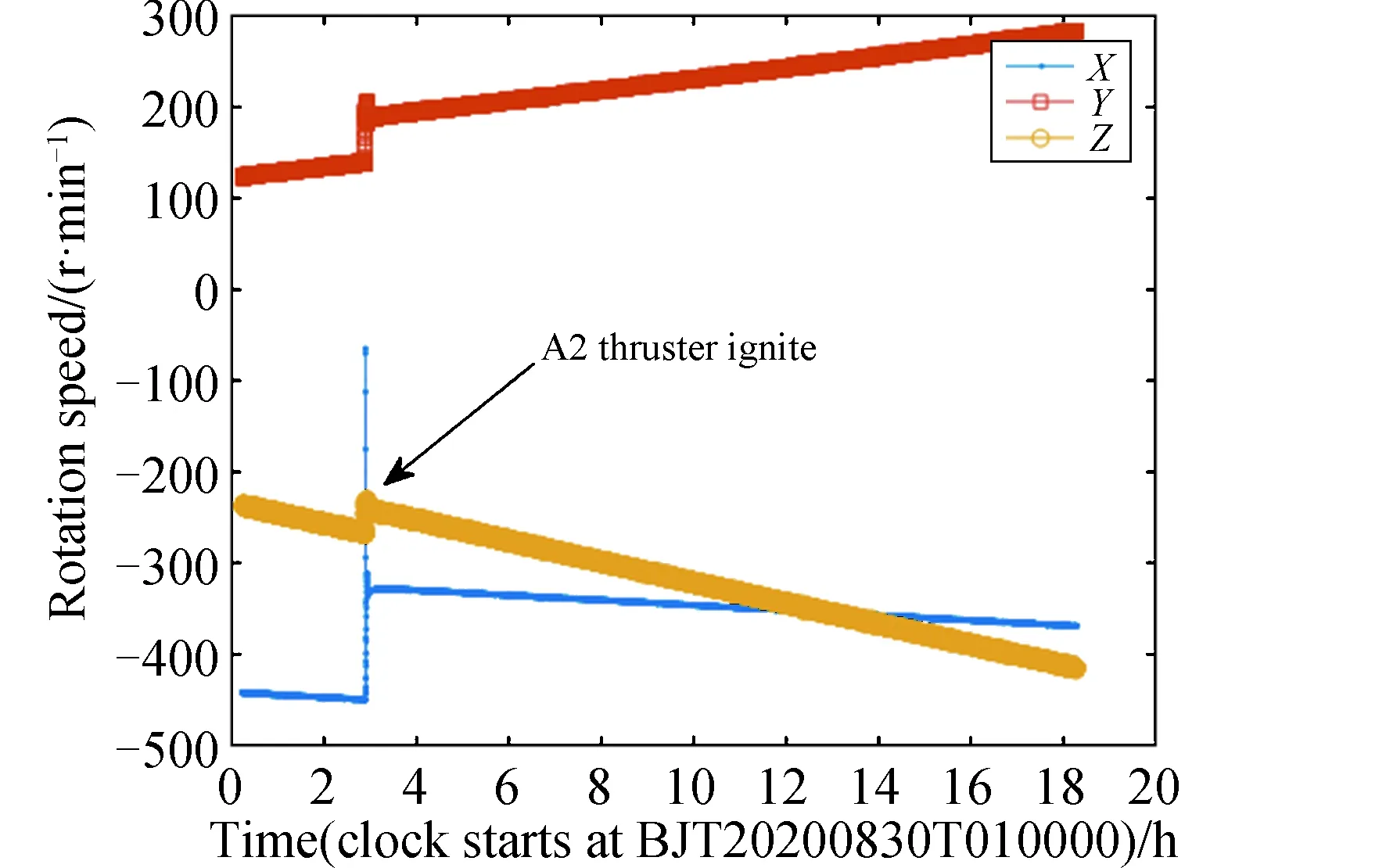
图2 X轴(A2推力器)喷气前后飞轮转速变化Fig.2 Flywheel rotation changes of X axial before and after ignition (A2 thruster)

图3 X轴(B2推力器)喷气前后飞轮转速变化Fig.3 Flywheel rotation changes of X axial before and after ignition (B2 thruster)
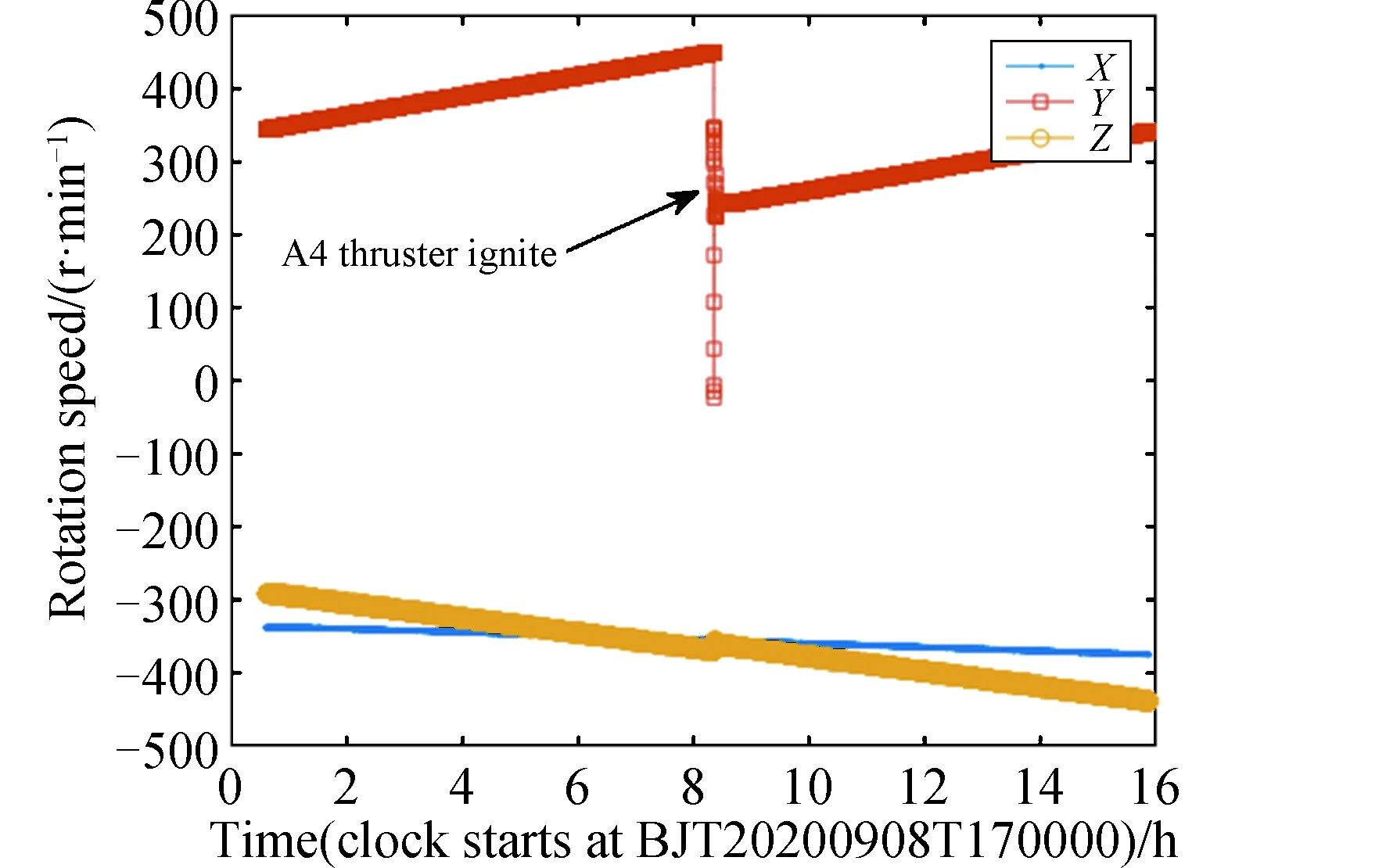
图4 Y轴(A4推力器)喷气前后飞轮转速变化Fig.4 Flywheel rotation changes of Y axial before and after ignition (A4 thruster)

图5 Y轴(B4推力器)喷气前后飞轮转速变化Fig.5 Flywheel rotation changes of Y axial before and after ignition (B4 thruster)
根据每次推力器喷气前后的飞轮转速变化,利用式(2)计算喷气产生的角动量,同时需扣除空间干扰力矩的影响。由于火星探测器在巡航段仅受光压力矩这一种空间力矩影响,在数天时间内光压力矩可认为是常值,因此可用一段时间的飞轮转速曲线线性拟合得到,即式(2)中的Te,结果见表2中空间力矩这一项。

图6 Z轴(A10推力器)喷气前后飞轮转速变化Fig.6 Flywheel rotation changes of Z axial before and after ignition (A10 thruster)

图7 Z轴(B10推力器)喷气前后飞轮转速变化Fig.7 Flywheel rotation changes of Z axial before and after ignition (B10 thruster)
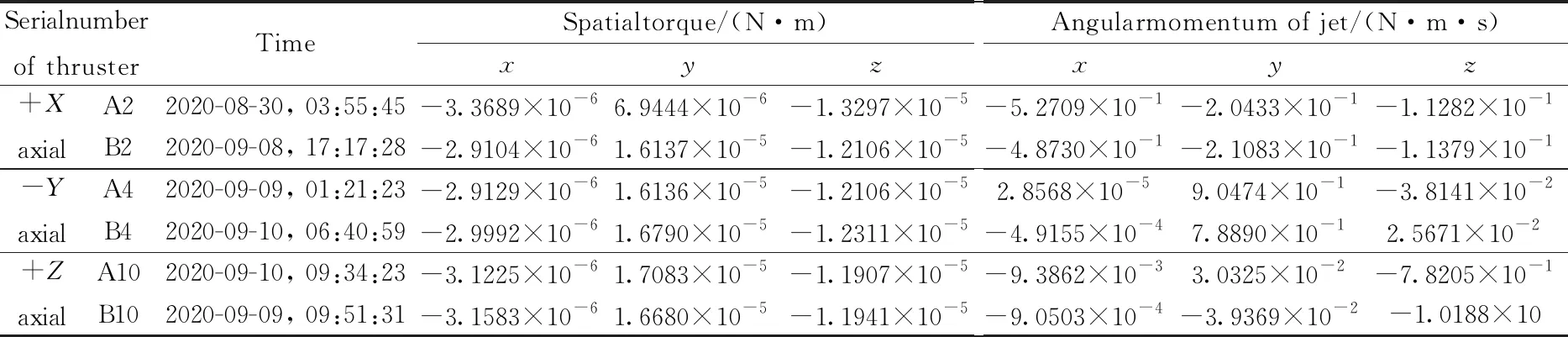
表2 喷气卸载前后干扰力矩计算结果
从上表看出,不同时段空间力矩有一定差异。在排除空间力矩影响后,每次喷气卸载引起的整器角动量变化也有较大不同,即使同一组推力器的两个分支,由于推力作用点,产生的角动量方向有一定区别。
根据式(5),仅有质心r0和推力矢量Fp未知(包括推力大小|F0|、推力横向角度偏差θ、推力纵向角度偏差φ三个参数),利用6次喷气卸载数据得到18个等式,而由于质心参数相同,待求解参数只有15个,最小二乘违逆求解推力器和质心偏差方向,结果如表3、表4所示。
对比任务指标,各推力器偏斜量均小于0.6°的任务指标,满足指标需求。
和理论质心位置相比,由于燃料装填量因素不可控,以及器上电缆等附件质量难以精确计算,质心在X轴上有一定偏差,其余两轴质心得到较好的控制。

表3 推力器偏斜量计算结果
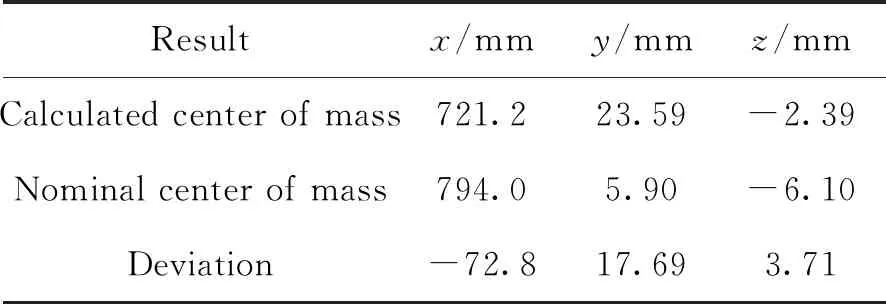
表4 质心偏差计算结果
5 结论
1)本文针对深空探测器飞行距离远、无法通过测定轨精确标定推力器参数的难点,利用探测器飞行过程中空间干扰力矩稳定的特点,提出了一种利用喷气卸载前后飞轮转速变化辨识整器质心和卸载推力器推力矢量的方案。和已有方法相比,脱离了额外的器上单机、地面测定轨的约束,任务面影响小。
2)在使用天问一号火星探测器的遥测数据进行推进系统参数辨识的过程中,由于A4、B4、A10、B10推力器方向与X轴平行,质心解析产生一定耦合,YZ轴质心具有较高的辨识精度,X轴质心辨识精度稍差。若要进一步提高精度,需在各轴上均进行喷气,在6个姿态维度上进行解析。
3)质心估计和推力器方向偏斜辨识可为后续轨控任务的点火方向制定、燃料预算提供输入依据,提高轨控精度,降低轨控风险。
4)后续主要针对推力轴与质心测量轴耦合问题、复杂空间干扰力矩影响问题开发解耦的辨识方法,进一步扩展本方法在航天器推进系统辨识上的应用。
