小型玻璃钢渔船自动控制系统设计
2021-12-20王乐张亚白世阳庞洪祯
王乐 张亚 白世阳 庞洪祯
摘 要:结合现有的监测技术,实现了小型玻璃钢渔船的自主作业。本文详细介绍渔船控制系统的设计和具体实施的手段。通过将渔船的控制系统分为船舶定位、推进、自动舵控制以及载荷收集系统,使各个分系统相互配合,从而达到渔船自动控制的目的。通過采用无线设备使管理人员能够在母船上控制多艘小型渔船,从而提高了渔船作业的效率。最后通过实船测试,论证了其渔船控制系统设计的可行性。
关键词:玻璃钢渔船;自动控制;运动监测
中图分类号:U661.73 文献标识码:A 文章编号:1006—7973(2021)11-0055-03
为了能够更好地利用玻璃钢渔船进行相应的作业,提高渔船的工作效率,本文设计了一套渔船自动控制系统[2-5],通过一艘母船上的设备能够无线控制多艘小型渔船进行相应的工作。
1 渔船自动控制系统
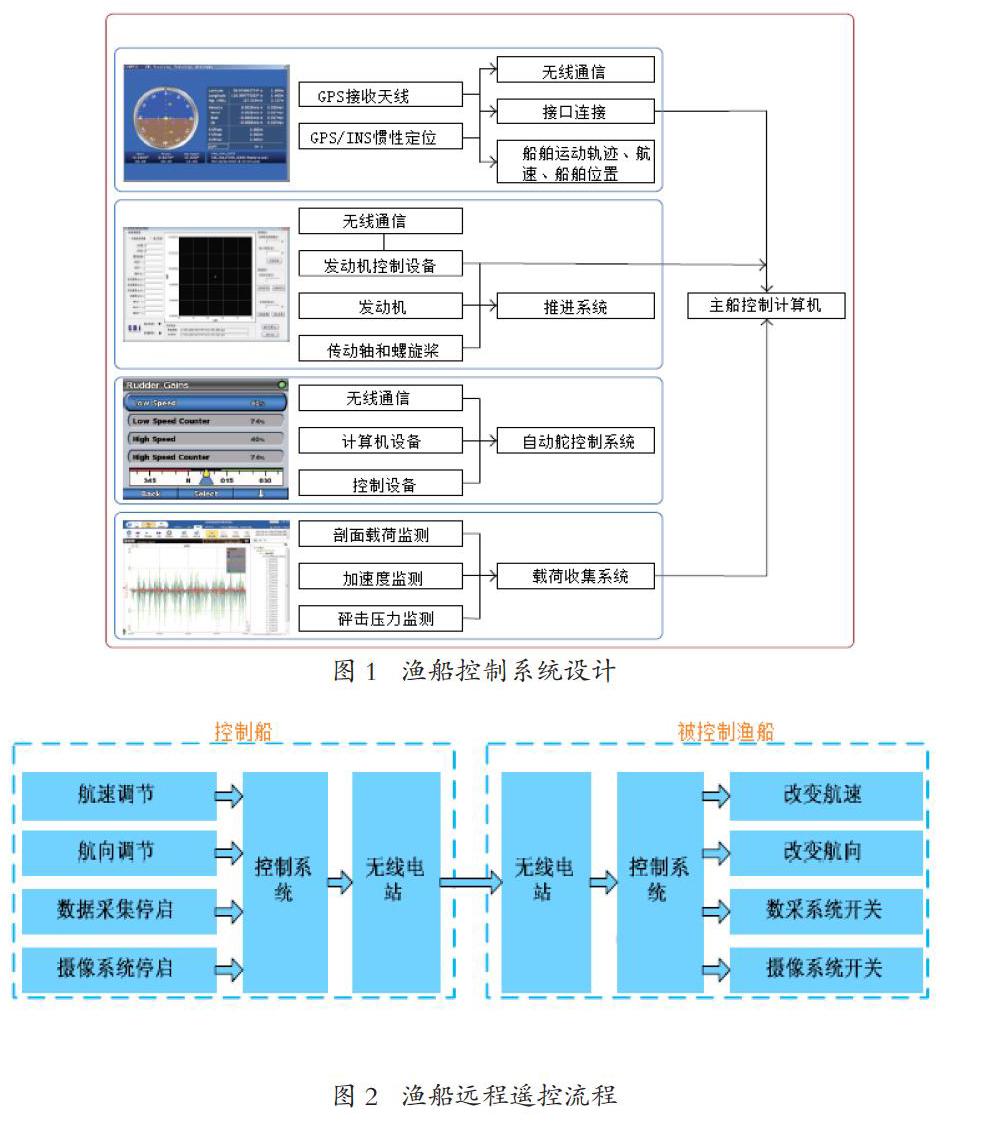
为了实现小型渔船的自动控制,对现有的小型玻璃钢渔船进行改装,在其艏、舯和艉处分别安装天线,使用无线设备进行传输,并通过不同系统之间的配合实现渔船自动控制。渔船的自动控制系统分为:定位系统、推进系统、自动舵控制系统以及载荷收集系统。当各分系统相互配合共同工作时,可通过位于母船上的管理人员有效控制,能够实现渔船的自动作业。
渔船的定位系统采用GPS/INS惯性定位系统测量其运动轨迹、航速、航向和运动姿态。GPS/INS的作用是用来进行船舶运动参数的测量,而GPS则用于进行船舶航行定位。GPS/INS模块安装在渔船的重量中心位置来测量渔船的摇荡姿态,其纵摇和横摇的测量精度分别为0.02°和0.05°[1],X、Y、Z三个方向的速度测量精度为0.02m/s;两个GPS接收天线则分别安装在艏艉甲板中线处。受控渔船和母船之间通过无线电传输信号,GPS/INS实时采集的信息可直接在母船上的控制电脑上查看。经实船测试验证得到:信号最大传输距离可达10km;而采样信号的频率不宜设置过高,一般为10Hz左右。
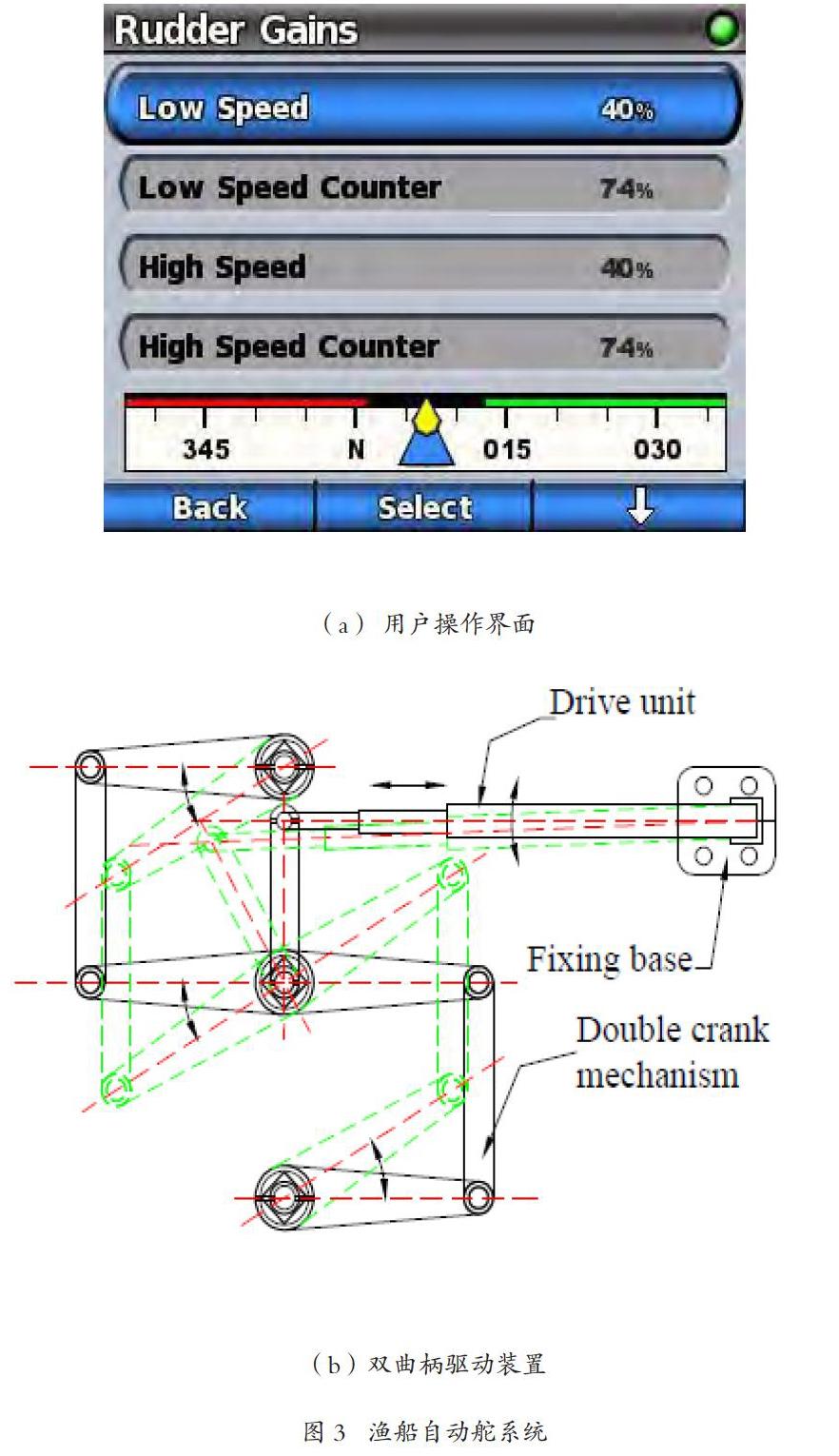
受控渔船的航速和航向由自动舵和推进系统共同控制,而母船上的管理人员则可根据对受控渔船航行状态需求发射远程控制指令,其操控系统的流程图如图2所示。在此过程中,管理人员可通过母船上的控制计算机输入指令,然后由无线电台将航速和航向调节指令传输给受控渔船上的接收器,从而实现对其航行状态的远程遥控。在整个控制系统中,共涉及到4对无线电台,全部安装在母船作业甲板上的相应位置:一对用来传输GPS/INS反馈的渔船航行状态信息;一对用来传输控制发动机转速设备的脉冲电压;其余两对用来传输舵的状态信息。
推进系统主要是采用无线电站来控制发动机监控设备的电压从而达到控制渔船螺旋桨转速的目的。通过调节发动机的旋转速度从而控制渔船的航行速度。
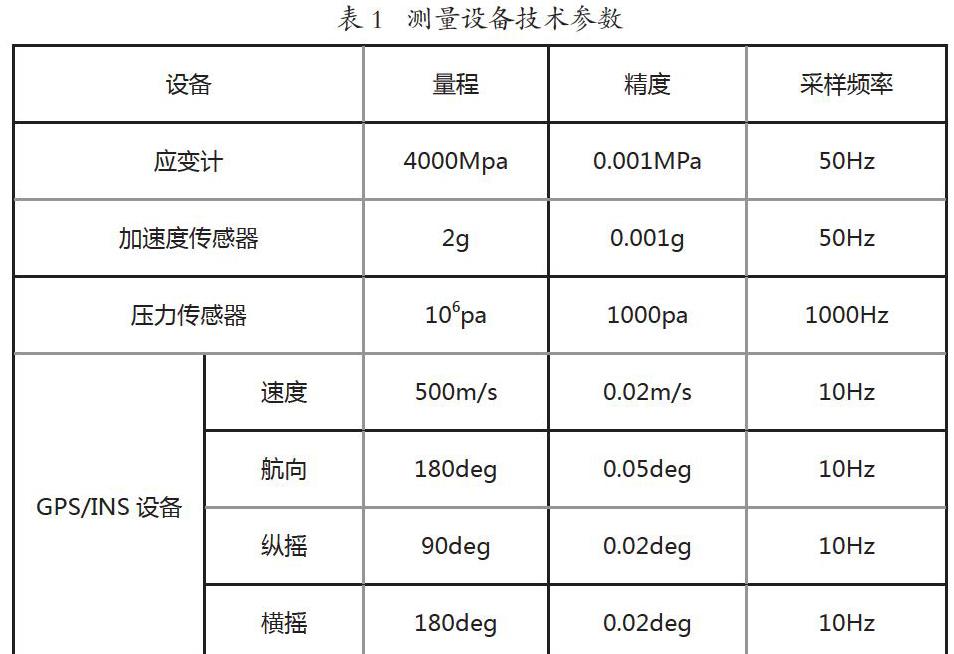
在控制渔船中安装自动舵,从而可实现沿固定方向直线行驶自动,舵系统用户操作界面如图3(a)所示。该系统包含航向陀螺单元(CCU)、电力控制单元(ECU)以及驱动液压杆三个部分。其中,航向陀螺单元(CCU)是自动舵系统的核心,判断被控制渔船的实时航向;电力控制单元(ECU)基于PID 逻辑算法,根据航向陀螺单元所提供的信息对驱动液压杆进行舵角调节,从而保证渔船保持期望的航行方向;驱动液压杆通过一套双曲柄传动结构实现同时控制双舵舵角,传动装置如图3(b)所示。母船上的试验人员通过操作界面对渔船的航向角进行控制,通过无线信号将操控信息传输给渔船,最终实现控制渔船航行。
数据采集系统可采用DH5902动态信号采集仪对作用在渔船上的载荷情况进行数据记录。该仪器可同时对不同类型的载荷信号频率进行采样,并将数据结果临时存储至其内置硬盘上。将动态信号采集仪安装于渔船上,通过信号线方式对部分数据进行传输与记录。同时,该采集仪的启停通过控制母船上的计算机发射无线脉冲信号来实现。数据采集内容包括:
(1)应力:将全桥应变计安装于渔船底部龙骨用以测量垂向和水平弯曲正应力。对所测得应力信号结合船体的结构参数可转化为船体所受的实时弯矩。
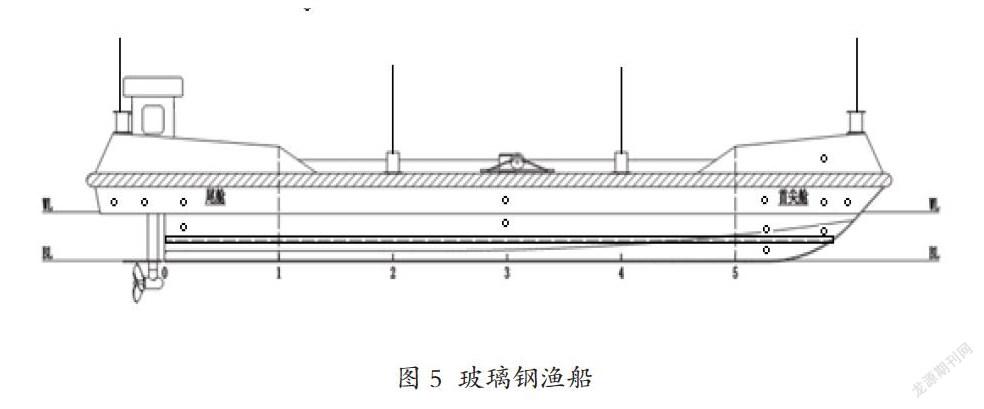
(2)压力:分别在渔船艏、舯以及艉部布置共计13个抨击压力测量点用以测量艏部外飘抨击压力。各测量点的具体位置如图5所示。
(3)加速度:分别在渔船艏、舯以及艉部的甲板上布置加速度传感器用以测量船体所受的波浪垂向加速度。
通过固定在渔船重心位置的GPS/INS 模块可测量得到船舶的纵向、水平以及垂向速度,航行经度、纬度以及高度位移,纵摇、横摇以及航向角。此外,在渔船上安装两个摄像机对其航行画面进行记录。测量设备及信号的基本参数情况如表1所示。
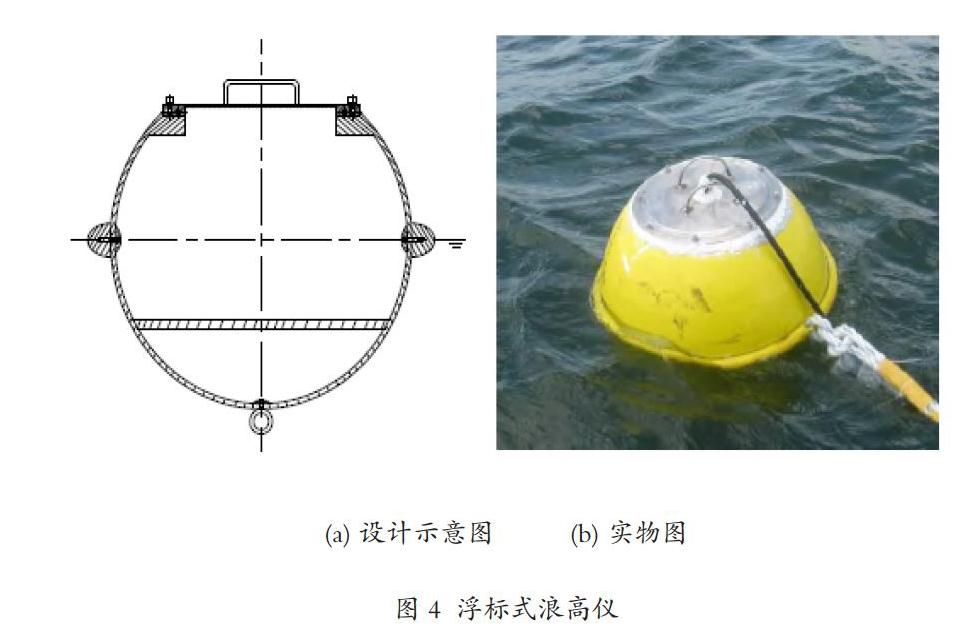
为了进一步确保渔船的航行安全,在渔船的航行海域进行海浪监测。其具体的做法为:采用浮标式浪高仪对渔船所作业的海域海浪信息进行测量,如图4中所示。该仪器外形为球形,工作状态时其下半部分浸入水中;底端通过悬挂铁链来降低重心,从而保证浪高仪在波浪起伏运动中保持直立状态;其水线面处安装有压浪板,从而避免产生仪器的水平方向摇摆。浪高仪与波面的起伏运动同步,因此波高的变化速度可以由安装在浪高仪中心位置处的加速度传感器进行测量,设定采样频率为50Hz。
2 玻璃钢渔船的监测点设计
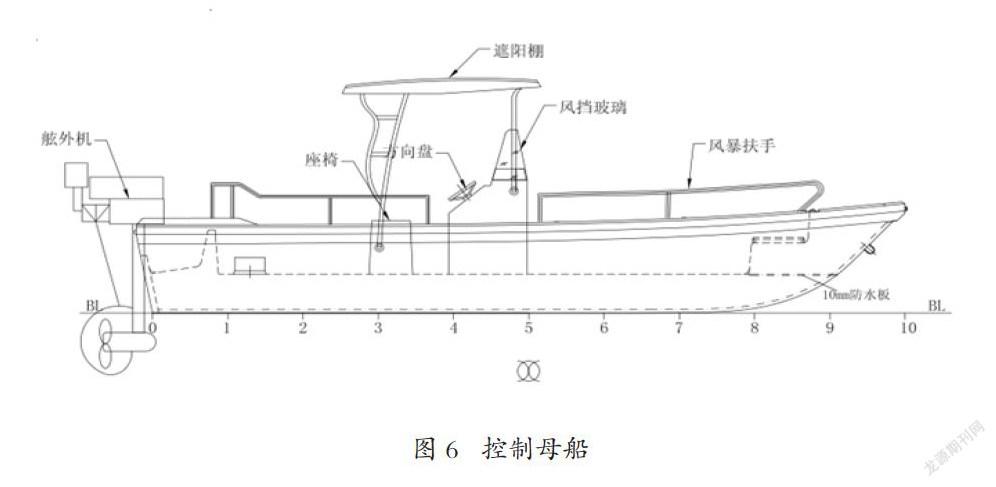
对于自动控制下的玻璃钢渔船和母船的监测点设计如图5和图6所示。
如图5所示,在被控制渔船的外壳上布置了13个抨击压力监测位置,其中艏部有7个监测点。其监测位置分布在三个横剖面上。船舯处有两个监测点,分布在设计水线的附近。而艉部有4个监测点,其分布在艉部推进器周围。在船底部有一个贯穿全船的龙骨梁,通过在龙骨梁上安装压力若干个应变计监测船体的整体形变。同时,4对无线电台的具体位置也在图中标明。图6给出了控制母船的设计。其与一般的渔船类似,监测控制计算机安放在此船上。管理人员通过在此处上可以监测并控制多艘小型渔船的作业。
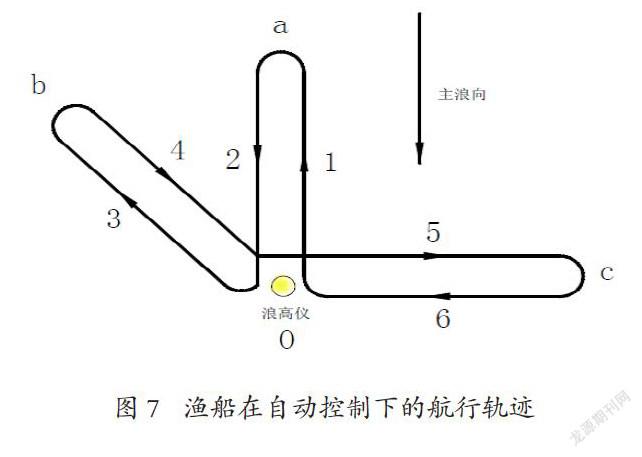
在黄海海域进行了此项控制渔船自动作业的试验并取得成功,试验论证了玻璃钢渔船控制设计的可行性,具体的航行轨迹如图7所示。
3 结论
本文通过结合现有的监测技术,实现了小型玻璃钢渔船的自主作业。并详细介绍了渔船控制系统的设计和具体实施的手段,从而使渔船在母船的控制下实现自主作业成为可能。最后通过实船测试,论证了渔船控制系统设计的可行性。
参考文献:
[1] 焦甲龙. 实际海浪环境中舰船大尺度模型运动与载荷响应试验研究[D].哈尔滨工程大学,2016.
[2] 张维英,纪明月,侯垚森,董震鹏.我国船舶制造数字化及信息化浅谈[J].中国设备工程,2017(12):177-178.
[3] 郑立大.环保清淤船自动控制及精确定位系统[J].电气时代,2013(08):90-92.
[4] 陈源华,郭晓浩,王辰辰.铺排船自动控制系统设计[J].船海工程,2009,38(06):157-159.
[5] 丁福光,王宏健,施小成,边信黔.潜器母船动力定位自动控制系统[J].船舶工程,2001(03):39-41+3.
