基于传递路径分析的车门下位玻璃异常振动预测与试验验证
2021-12-20高云凯陈佳举
刘 哲,高云凯,徐 翔,马 超,陈佳举
(同济大学 汽车学院,上海 201804)
随着汽车产业消费的不断升级,消费者对乘用车的NVH(noise,vibration,harshness)问题日益重视,消费者在购买汽车时留下第一印象的就是车门NVH,因此成为各整车厂面临的难题[1-5]。车门是汽车车身不可缺少的总成,是乘员舱内功能附件和隔音的关键支撑部件。车门性能不佳会导致密封性差、异响等功能问题。关门时的振动测试一般需要整车制造完成后才能进行。因此,如何获取关门时的瞬态冲击载荷和提前预测车门的振动显得尤为重要。因此车门的NVH问题已经称为汽车工程领域关注的焦点之一。
传递路径分析(transfer path analysis,TPA)方法采用的是“源-路径-目标”的模型,该方法得到了快速的发展,TPA因其精度高、方法成熟的优点,仍被学者们广泛采用[6-7]。侯锁军等[8]针对某国产样车存在怠速时方向盘抖动问题,采用传递路径分析方法,寻找出方向盘抖动的原因,采用改变发动机悬置固有频率的方法有效解决了响应问题。杨洋等[9]采用阻抗矩阵法分析了车内共鸣声的传递路径,识别出两种工况下车内共鸣声产生的原因为激励力大和路径灵敏度高。王万英等[10]进行了关于轮胎噪声结构传递路径试验,找到了对车内噪声起主导作用的传递路径。高云凯等[11]以工作变形分析为基础,提出了一种基于工作变形模态分解的关门异响振动噪声识别的方法;以及应用适用于瞬态问题的时频偏向干算法研究了车门系统各部件对关门振动噪声的贡献。
上述的TPA研究中均存在明显的传递路径激励点,便于传递路径的划分,在进行TPA分析中直接以物理边界点为路径激励点即可,因此上述方法只能求取模型中存在明显物理边界点处的载荷,不能应用到模型中无明显边界点的载荷求取中,如本文车门关闭时的瞬态冲击载荷,并且上述方法均没有用于车门NVH问题的预测研究中。本文对车门关闭时的瞬态冲击载荷进行了离散化设计,并利用TPA中的逆矩阵(inverse matrix,IM)方法求取离散化瞬态冲击载荷,最后将其作为有限元模型的输入量,对车门关闭时的瞬态振动进行预测研究并取得了一致性较好的结果。因此,本文验证了通过离散化车门关闭的瞬态冲击载荷对预测振动响应的可行性,并且为后续批次车门的设计制造提供了重要指导。
1 TPA基本理论
在时域TPA理论中,对线性时不变系统,目标点响应是由结构声和空气声线性叠加得到
(1)
式中:Pl(t)为第l个目标点的总贡献量响应;t为时域数据;Pli(t)为第i条路径的结构载荷对目标点l的贡献量;Plj(t)为第j条路径的空气载荷对目标点l的贡献量;n和m分别为结构载荷和声学载荷的传递路径数量。
系统中每一个目标点响应由作用在该激励点上的激励载荷乘以该条路径的单位脉冲响应函数的卷积得到,则式(1)可写为
(2)

结构载荷和声学载荷对目标点响应的计算过程类似,为了文章的简洁性,本文以结构响应为例进行分析。在机械系统激励点附近设置2倍的参考点用于求解激励载荷,得到参考点的响应和激励点至参考点的单位脉冲响应函数,利用逆矩阵法得到激励点载荷。

(3)
式中:I(t)为参考点的振动响应;f(τ)为激励点激励载荷构成的n行列向量;h(t-τ)为各激励点载荷至参考点振动响应的单位脉冲响应函数。
利用反卷积即可从式(3)中求取激励点载荷f(t)。假设反卷积的单位脉冲响应函数为r(τ′),则参考点加速度响应I(t)通过反卷积系统时为
(4)
显然式(4)成立的前提是式(5)成立

diag[δ1(t-τ),δ2(t-τ),…,δn(t-τ)]
(5)
式中:δ1(t-τ),δ2(t-τ),…,δn(t-τ),为δ函数。对式(5)做傅里叶变换得到
R(ω)H(ω)=E
(6)
式中:R(ω)和H(ω)分别为r(t)和h(t)的傅里叶变换;E为单位矩阵。
由式(6)可得R(ω)和H(ω)互为逆矩阵,因此首先测量得到各激励点至参考点的频响函数矩阵H(ω),通过求其逆矩阵得到反卷积系统的频响函数矩阵R(ω),利用频率采样法将其构造成有限脉冲响应数字滤波器矩阵,将参考点时域振动响应通过滤波便可得到激励点处的时域载荷。同样可以获得激励点至目标点的滤波器。
本文采用奇异值分解正则化处理矩阵载荷识别中遇到的矩阵病态问题。频率响应函数矩阵进行奇异值分解之后。最大的奇异值与最小的奇异值之比为条件数,反应了矩阵病态良态特性。当条件数越小表示矩阵越健康,输出数据的精度越高,但强行降低条件数可能会损失重要信息。因此本文选择的条件数为小于100[12]。
最终得到激励载荷的表达式为
(7)
式中:rn2n(t)为激励载荷fn(t)对参考点响应I(t)的单位脉冲响应函数;“⊗”为卷积计算。
由于一般时域信号较长,应用基于分段准线性原理的离散形式对其进行离散。这种离散形式将时域信号分解为足够小的时间步长,然后对每一个步长进行卷积计算。离散形式的方程为
(8)
式中,tj为第j个时间步长。
对于多目标的振动系统,式(9)可以扩展为以下形式

(9)

(10)

(11)
式中,xl(tj)为第l个目标点在第j个时间步长的响应。
将式(7)求得的激励点载荷代入式(8),就可以得到目标点处离散时域的响应结果。将每个时间步长依次排序,代入式(9)便可以得到完整的时域响应结果。
综上,时域TPA在车门关闭瞬态振动工况分析流程如下:
步骤1确定车门关闭工况中时域TPA模型。如激励点、参考点、目标点。其中需对密封条的冲击载荷进行合理的离散化设计。
步骤2测得试验数据。包括参考点和目标点的振动响应,离散激励点至参考点和离散激励点至目标点的频率响应函数。
步骤3求解滤波器。将离散激励点至参考点的频率响应函数做正则化处理并求其广义逆进而构造广义逆的反卷积滤波器。同理得到离散激励点至目标点的卷积滤波器。
步骤4求解离散激励点冲击载荷和目标点响应。将参考点振动响应通过反卷积滤波器得到离散激励点冲击载荷,进一步通过离散激励点至目标点的卷积滤波器,最终得到目标点的振动响应。
步骤5有限元求解。将求得的离散激励点冲击载荷作为有限元的输入条件,获得目标点处的振动响应,对比目标点的实测值与仿真值,验证通过离散化车门关闭的瞬态冲击载荷对预测振动响应的可行性。
2 车门TPA模型
文本的研究对象为某乘用车左前车门玻璃下位工况,开启方式为顺开式车门,关门速度为1.5 m/s。车门在关闭瞬时主要受到锁机(A1)和密封条(A2~A9)处的冲击载荷,因此对密封条处的冲击载荷进行合理的离散化处理成为建立车门TPA模型的重点。为了便于后续分析研究,将密封条处的冲击载荷离散为8个集中载荷[13]。因此离散化后的冲击载荷所在位置,如图1所示。利用传递路径求取激励点载荷时,需要设置参考点,且参考点的数量为激励点的2倍或以上。因此参考点所在的位置,如图2所示。通过前期的振动水平摸底试验可知,引起关门异常振动是由下位玻璃的异常振动所导致的,因此传递路径的目标点选择为下位玻璃上的测点,如图3所示。由于密封条(A2~A9)处的冲击载荷仅为Y向,锁机(A1)处的冲击载荷为XYZ三向[14],因此离散化后的瞬态冲击载荷的自由度为3×1+1×8=11。参考点的自由度为3×16=48,因此满足TPA分析中参考点自由度为激励点自由度的2倍或以上的要求。且参考点的位置距离激励点的位置应适中,20~40 cm是合适的做法。

图1 离散化后的冲击载荷所在位置Fig.1 Location of impact load after discretization

图2 冲击载荷对应的参考点Fig.2 Reference point corresponding to impact load

图3 目标点Fig.3 Target point
车门在关闭瞬时,振动能量通过锁机(A1)和密封条(A2~A9)传递至车门内板,车门内板的振动能量再经由导轨接附点传递至下位玻璃目标点(C1),从而引起下位玻璃的异常振动。车门的TPA模型,如图4所示。

图4 车门TPA模型Fig.4 TPA model of the door
3 试验数据
为了求取车门关闭时的瞬态冲击载荷,本文设计了整车和台架试验分别获得车门关闭工况数据和频率响应函数。
3.1 整车试验数据采集
本次试验是在某主机厂的半消声室中完成。在图2中的冲击载荷对应的参考点和图3中的目标点处粘贴三向加速度传感器,如图5所示。三向加速度传感器的型号为PCB 356A16,信号采集系统为120通道LMS数据采集系统,型号为LMS SC316-UTP。

图5 整车试验Fig.5 Vehicle test
为了精确控制车门关闭速度为常用关门速度(1.5 m/s),本次试验增加了车门关闭速度控制装置,橡皮绳一端固定在车身内侧,另一端固定在车门侧,橡皮绳在其弹性阶段,其产生的弹力和伸长量成正比,因此可以通过控制车门的开合角度控制橡皮绳对车门产生的拉力,从而使得车门可以产生不同的关门速度。在车身侧粘贴门速仪,记录车门关闭的瞬时速度。因此通过橡皮绳和门速仪的配合完成采集车门的常用关门速度。关门速度控制装置,如图6所示。

图6 关门速度控制装置Fig.6 Door closing speed control device
通过多次尝试车门开合角度,确定将车门开合到某一角度后,橡皮绳对车门施加拉力使得车门向车身侧转动,使得车门在关闭瞬时速度为1.5 m/s。三向加速度传感器采集车门在关闭时参考点和目标点处的瞬态振动响应。可获得式(7)~式(9)中的[I1I2…I2n]T和[X1X2…Xl]T,即为参考点和目标点的加速度响应。
3.2 台架试验数据采集
台架试验数据采集中三向加速度传感器粘贴的位置、传感器型号和采集系统型号均与3.1节所述一致。利用结构胶将2 cm×2 cm×2 cm的金属块粘贴于锁机(A1)处,利用力锤依次敲击锁机(A1)的XYZ三向和密封条(A2~A9)的Y向,并且每次敲击5次进行平均,在参考点和目标点处拾取响应获得激励点至参考点、激励点至目标点的频率响应函数,即为式(7)和式(8)中的rn2n和h′。台架试验,如图7所示。

图7 台架试验Fig.7 Bench test
4 有限元分析
对该车型的左前车门结构进行瞬态有限元分析。
4.1 车门参数
该车型的左前车门有限元模型,如图8所示。车门的主要部件有15个,如图9所示,主要部件的名称、编号,如表1所示。

图8 车门有限元模型Fig.8 Finite element model of the door

图9 车门结构主要部件Fig.9 Main components of the door structure
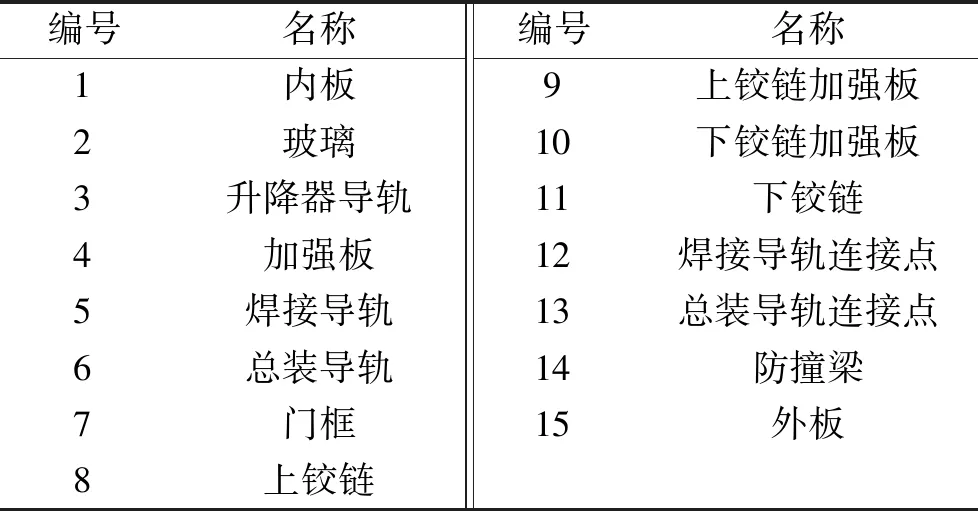
表1 车门主要部件编号及名称Tab.1 Number and name of the main parts of the door
车门系统有限元模型中,钣金件均使用Pshell 2D壳单元,铰链使用Psolid 3D实体单元进行模拟;车门内板和外板为包边处理使用共节点单元进行模型;车门外板和防撞梁为胶粘处理使用Area(adhesives)单元进行模拟;车门内板与加强板为点焊处理使用Acm(equivalenced-(T1+T2)/2)单元进行模拟;铰链和内板为转动轴连接使用Cbeam 1D单元进行模拟。
车门结构材料与主要参数,如表2所示。
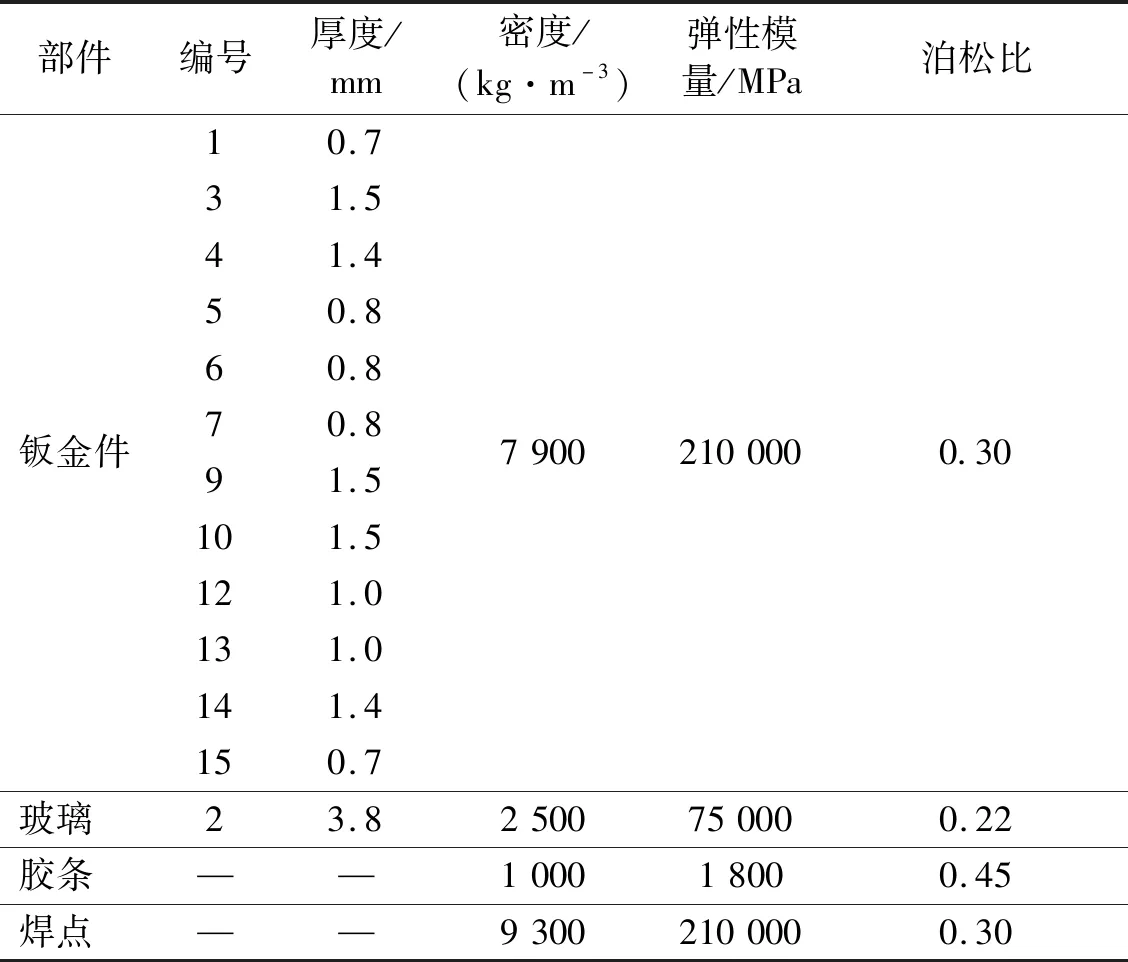
表2 材料属性Tab.2 Material properties
4.2 参数瞬态有限元仿真
根据3.1节测出参考点和目标点的工况响应,3.2节测出的激励点至参考点和激励点至目标点的频响函数,利用式(7)的逆矩阵法可求出激励点的瞬态冲击载荷,如图10所示。

(a)A1点X向
可知锁机处激励点A1Z向的冲击载荷最大,这是由于车门在装配时存在装配误差,导致车门在Z向产生了下垂错位。
将求取出的激励点瞬态冲击载荷施加在车门系统的有限元模型中,为了近似模拟车门系统的真实工况,在车门上下两个铰链处施加X、Y、Z三向的平动和绕X、Y、Z三向的转动约束自由度,如图11所示。

图11 载荷和边界条件Fig.11 Loads and boundary conditions
得到车门系统在3.8 s时的加速度振动响应云图,如图12所示。可知车门在门框7处的振动幅值最大,与试验测的结果一致。提取车门系统中目标点C1处随时间历程变化的加速度振动响应曲线和整车试验测得的目标点响应曲线,如图13所示。
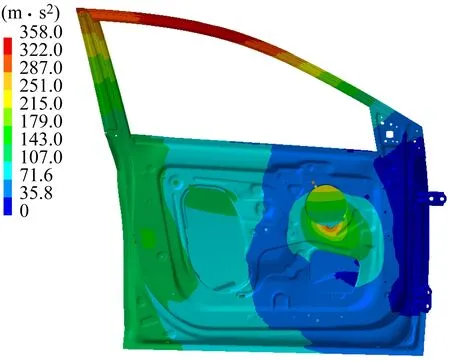
图12 车门系统振动响应云图Fig.12 Vibration response of the door system

图13 目标点实测值与仿真值Fig.13 Measured value and simulation value of target point
为了比较目标点的实测值和利用有限元得到的仿真值的吻合程度,本文采用均方根误差(root mean square error,RMSE)作为比较准则进行误差分析,其公式为[15]
(10)
式中:yreal为实测数据;ypred为仿真数据。
RMSE数值越小,表明仿真数据ypred和实测数据yreal的误差越小。目标点C1处的实测值振动响应和仿真值振动响应的RMSE数值为0.806。说明两者在趋势上重合度较好,因此本文提出的离散化传递路径分析模型适用于车门关闭工况。
5 结 论
针对某车型左前车门玻璃下位关门过程中玻璃存在异常振动的现状,首先以车门关闭的瞬态冲击载荷为研究对象,对其进行了离散化研究。提出了利用TPA中IM方法对离散化瞬态冲击载荷进行计算的方法,并将计算得到的瞬态冲击载荷施加到有限元模型中对其进行瞬态振动求解,比较了目标点处的实测振动响应与仿真响应,并得到了良好的一致性结果。本文所做工作及取得的主要结论如下:
(1)本文对时域TPA方法进行了应用性创新,提出了适用于本文车门玻璃下位异常振动的离散化传递路径分析模型,本文验证了通过离散化车门关闭的瞬态冲击载荷对预测振动响应的可行性,表明该方法适用于本文的研究对象。
(2)分析结果表明,锁机激励点Z向的冲击载荷最大,表明该车型的车门在装配时存在装配误差,导致车门在Z向产生了下垂错位。
(3)分析结果表明,在车门还处于未制造出样件的设计阶段时,可通过瞬态有限元求解的方法,提前对车门的振动情况进行预估,并指导车门的改进工作,可以节省大量的人力物力,对产品的开发流程起到了促进的作用。
