无人机在林业伐区调查中的应用
2021-12-18叶晓鸿
叶晓鸿 周 勇 曹 谊
(广东省德庆林场,广东 肇庆 526000)
引言
对森林资源进行调查、设计、规划等,是林业部门重要的工作内容,通常分为内外业不同的工作项目,宗旨在于了解森林资源的规模、质量、分布状况以及变化情况等。无人机是最近几年我国兴起的最先进的遥感数据采集平台,以其独特的优势成为森林资源调查评估的核心手段。基于采伐区对森林蓄积量的调查要求,利用无人机遥感影像对小班采伐前后的两期进行拍摄,进行林分蓄积量的调查评估。对林区采伐前后的无人机点云匹配、点云预处理方式以及布料模拟滤波算法进行分析,并结合野外采集的树高以及单木材积实测数据构建随机森林模型,对伐区森林采伐蓄积量进行有效调查评估,估算精度可达96%。
1.无人机在林业调查中的应用概况
无人机作为无人驾驶的飞行设备,技术的核心利用无人系统操作作业,核心设备是无线电遥控或者是将小型计算机控制系统配置在无人机上。比较其他林业作业设备,在林业调查和预估工作中应用无人机技术,在降低了成本的同时,也能够代替一些载人飞机的功能,主要是人员和飞行器难以实现的工作目标,例如,代替人员进行高危场所的调查和勘察,以及进行灾区救助活动进行环境遥感监测等。
在林业调查尤其是伐区的林业资源调查中,无人机比起传统的调查技术,体现两个方面的优势:
第一是在一些意外事件发生时候,无人机的行动速度快,在地面上相关人员就能够控制空中的无人机,并可以及时获得现在的信息。
第二是无人机的机动性能良好,不需要人工驾驶,在设计上具备体积小的优势,在森林资源或者蓄积量的评估中,需要深入复杂艰险的林业环境,获取可靠的第一手数据。同时,无人机灵活方便,通常对飞行场地没有特殊或者高要求,可以适合绝大多数的林区调查任务。 尤其是在受灾的林区获取可靠的信息,把精准的空间位置信息提供给救援人员,以弥补大尺度航空技术领域的缺陷。
2.林区概况与数据来源
2.1 调查区概况
广东省德庆林场属公益一类事业单位,林场经营总面积13.1万亩,其中人工桉树纯林面积3.8万亩,杉木1.6万亩,马尾松2.5万亩,其他混交林5.2万亩。本研究选择选取广东省德庆林场2020年伐区,采伐树种为桉树,年龄10年,位于象牙山管护站大石峡工区00200、00400小班。
2.2 数据来源
本次调查的主要数据来源为林区小班采伐前和采伐后两期无人机遥感数据,在采伐前的无人机数据获取采用大疆精灵4无人机进行,相机配备1英寸CMOS,有效像素2000万,35mm等效焦距,无人机的影像拍摄时间为2019年12月27日上午,设置85%的无人机飞行航向重叠率,设定80%的旁向重叠率,高度500米,共获得115张有效影像,进行镶嵌和正射整理后获取影像覆盖面积大约为4800亩。
小班采伐后获取数据的无人机类型为大疆精灵4类型,无人机的影像拍摄时间为2021年2月7日上午,设置80%的无人机飞行航向重叠率,设定78%的旁向重叠率,高度500米,共获得45张有效影像,进行镶嵌和正射整理后获取影像覆盖面积大约为2300亩。利用两期无人机获取的影像能够清楚地捕捉到小班区域采伐前后的林冠和地形。
3.无人机在林业伐区调查中的应用分析
3.1 无人机数据处理
无人机数据处理可以利用pix4D软件完成:第一步是三角测量计算在空中自动完成,恢复并校正真实的影像数据,形成效果的精度报告;第二步是加密点云,产生的点云数据后缀为+AS;第三步,自动拼接获取的数据,输出正射影像、数字表面模型输出。由此获取的真色彩的正射影像色彩十分自然而协调,没有明显接线 。
3.2 点云匹配
小班区域地势陡峭坡为28度 ,如果直接用于采伐,提取树高可以利用两期无人机拍摄的DSM数据,那就难以确保每株树对应实际位置,形成很大提取树高的误差。本调查研究利用的是点云配置措施,就是采伐前林冠点云必须符合采伐后的地形点云,最大限度地减小地形坡度影响树高提取的程度。无人机的点云配准通常利用RISCANPRO软件 ,准时匹配选择的六个同位点,配准精度为0.1m,保证调查区域每株树木的点云位置控制在0.1米范围内的误差。
从图1中不难看出,将采伐前小班林冠点与采伐后的小班地形区域进行准确匹配,可以一定程度上避免树高提取受陡峭地形的影响。

图1 采伐前无人机点云(a)、采伐后的无人机点云(b)和两期点云匹配后效果(c)。
3.3 布料模拟滤波算法
本调查研究的最关键的步骤是将匹配后的无人机点云数据进行有效分离。本研究利用布料模拟滤波算法进行,计算过程通过三维网格表达“布料”,仿真布料可用弹力和张力的作用完成,也就是说倒置地形后的地形点的模拟利用“布料”模型进行,将匹配后的地面点和非地面点进行分离。
一般情况下,传统的点云滤波算法必须具备很多为经验值的参数,并且要反复不断地试验方可得到不错的滤波效果。而CSF算法的滤波只是选择点云的密度和地形起伏的程度,即能产生不错的滤波效果。
大量实践证明,CSF算法能够更精确地分离地形点和林冠点云。但因为成熟林占据主要的情况,具备很高的郁闭度,并且基于不规则的多边形采伐边界,为了能够保持小班采伐完整的边界,务必要裁剪点云的范围稍大于采伐区,这样就极易导致CSF算法不能对采伐区外的地形进行模拟,致使分离后的地形点云周围依然有部分林冠点云残留;因此,将林冠点云与地形点云相减,可以减轻林冠点对调查结果的影响。
3.4 DEM、DSM的获取及DEM验证
本调查研究利用自然领域插值法,采用无人机获取的林冠点云数据构建网格单元为0.0065 x0.065m的模型。该方式的样本点采用最邻近的,样本权重的插值要根据区域的大小并按照比例进行,比起常规的方式,可以很好地还原地表的局部特征,可以利用相同的插值法进行无人机地面点云数据模型的构建,这些数据均来源于滤波获取。DSM数据与格网单元大小相同,如图2所示。
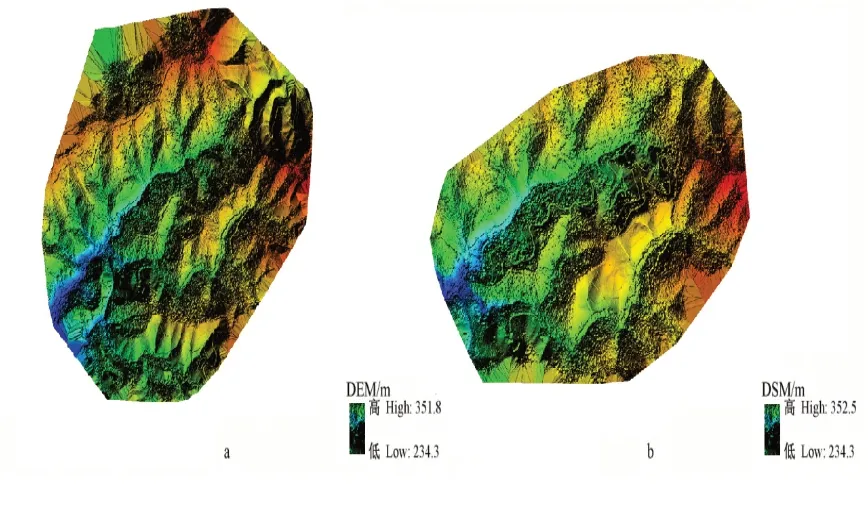
图2 地形点云数据生成的DEM(a)和林冠点云生成的DSM( b)
DEM数据是经过滤波点云数据后获得,其精准的程度会对后期树高的估算精度有很大影响,所以,有必要组织DEM数据验证精度。本调查研究DEM的精度的验证利用检点法,计算出相应的误差。
3.5 地面调查数据获取
2019年12 月28日对研究样地进行实地调查,伐区小班面积578亩,有林面积490亩。采用角规调查方法,利用无人机伐前影响进行分析,根据林相情况,将伐区分为“好”“中”“差”,按照各自占的面积比例进行角规点布设。 其中“好”面积120亩布设角规点3个;“中”面积250亩布设角规点6个;“差”面积120亩布设角规点3个。
利用杆式角规,在远离林缘事先设定的角规点选取一个中心点,绕测一周并计数,与角规视线相割的计数1株;相切的计数0.5株;相离的计数0株。研究样地的蓄积量根据《广东省森林资源调查常用数表》,查找桉树类林分形高表(角规断面积公顷蓄积表),查找对应角规点公顷蓄积量。计算公顷蓄积量的公式如下:
式中:每公顷断面积蓄积设定为G;平均树高设定为H;绕测数量设定为Z。

单位:亩、cm、m、株、m3林相类型 面积 角规点 平均胸径 平均树高 绕测数量 公顷蓄积好 1201 15.6 19.4 16 152.72 15.4 19.0 17 159.53 15.4 19.5 15 143.7 中 2501 14.9 17.5 13 114.02 15.0 17.4 11 96.13 14.9 17.4 13 113.54 15.0 17.3 12 104.35 15.1 17.5 13 114.06 14.8 17.5 12 105.3 差 1201 14.9 17.6 10 88.12 14.7 17.7 10 88.53 14.8 17.6 11 96.9
3.6 冠层高度模型的获取
归一化数字模型( nDSM )的型场实际上就是DSM高程减去DEM 高程的结果。在林区里,冠层高度模型可以等同于nDSM,树木的实际高度与得到的林冠高程相等,可以直接获得树高的信息,例如本研究区域桉树整体度在0~30m之间,而且小班边界外处于很低的高度,足以显示将林冠点云高程与地形点云高程相减,完全能够去除小班边界周围残留林冠点云对树高提取的影响。
3.7 林冠顶点提取
对于林冠顶点的提取方式,应用最多的是局域最大值算法,一般分为动态窗口和固定窗口。机载激光雷达点云数据和遥感影像是主要的数据源。基于固定窗口的最大局域值算法,在进行林冠顶点的探测中时常发生漏提或者多提现象,加之异常复杂的遥感影像光谱信息,会有诸多林冠光谱最大值出现,所以,研究数据的适合行和局域最大数值的准确性是十分关键的因素,必须进行筛选和调整。本调查选择的是生成的冠层高度模型 (CHM), 探测林冠点位置利用动态窗口。
首先,探测林冠顶点位置利用某个很小的固定窗口进行,然后采取的顶点是通过自适应动态窗口判断获取的,当前顶点是相应窗口区域的最大值,否则动态窗口大小是通过计算潜在顶点8个截面方向的半方差变化值自适应确定的,其计算公式如下:
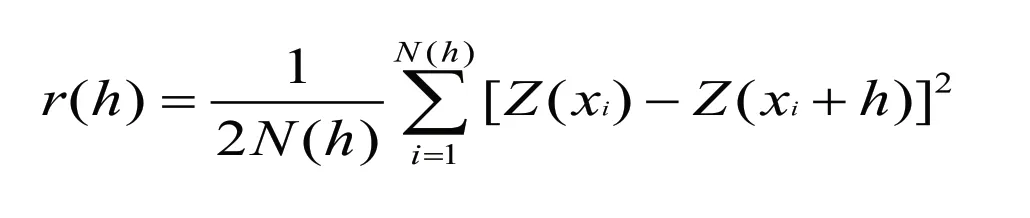
式中: ()rh为经验半方差;设定影像元位置为x1;设定为2个像元的空间分割距离;Z(x)为对应影像x1处的像元值;N为在一定分隔距离下像元对的对数。
4.结束语
综上所述,无人机是实现林业现代化的有力保障,是降低基层工作强度的有效手段,无人机技术加快了林业自动化、高效化、信息化的进程,而且必将成为未来林业工作的不可或缺的现代化工具,成为现代林业、精准林业和智慧林业建设目标实现的强劲动力。
本研究获取的数据源真实可靠,均为两期无人机在自采伐前后拍摄的遥感影像数据,然后进行准确的点云匹配,最终精准地构建出冠层高度模型,利用动态窗口的局域最大值完成林冠顶点的提取,并且尝试构建适合广东森林伐区的胸径、树高模型估算单木胸径,精准地算出伐区小班森林采伐蓄积量。
