无人机空中回收释放装置
2021-12-17李博炀周毅飞刘伯墉
李博炀,岳 源,李 昊,周毅飞,刘伯墉
(中国民用航空飞行学院,四川 德阳 618307)
0 引言
无人机空中回收释放是指有人机在携带无人机的情况下使无人机在空中脱开机械连接自由执行任务并且可以在任务完成后在空中与其重新连接起来的技术。现阶段无人机回收释放技术只能针对于地面多架无人机或空中单架无人机的回收并且很多方案局限在旋翼机的回收与释放层面上。相比于旋翼无人机,固定翼无人机具有速度快、载重大、航程长等特点,在执行任务方面具有明显的优势[1],故本方案拟采用的投放机型为固定翼无人机。
本方案旨在设计一款可以携带多架固定翼无人机并进行空中回收释放功能的机构,实现有人机与无人机的优势互补,其关键在于无人机的回收方式。回收方式能否机动灵活、准确性和可靠性的高低、及设备操作难度等已成为评价无人机性能好坏的重要指标[2]。如表1[3]中所示,目前已知的回收方式有滑跑降落回收、伞降回收、撞网回收、横式撞线回收与绳钩回收。但这些方案不适用于空中多架次无人机的回收与释放。因此要设计一款连接在无人机与运输机之间的收放装置,并使用电路传感器联动模式,实现无人机的集群投放与回收。
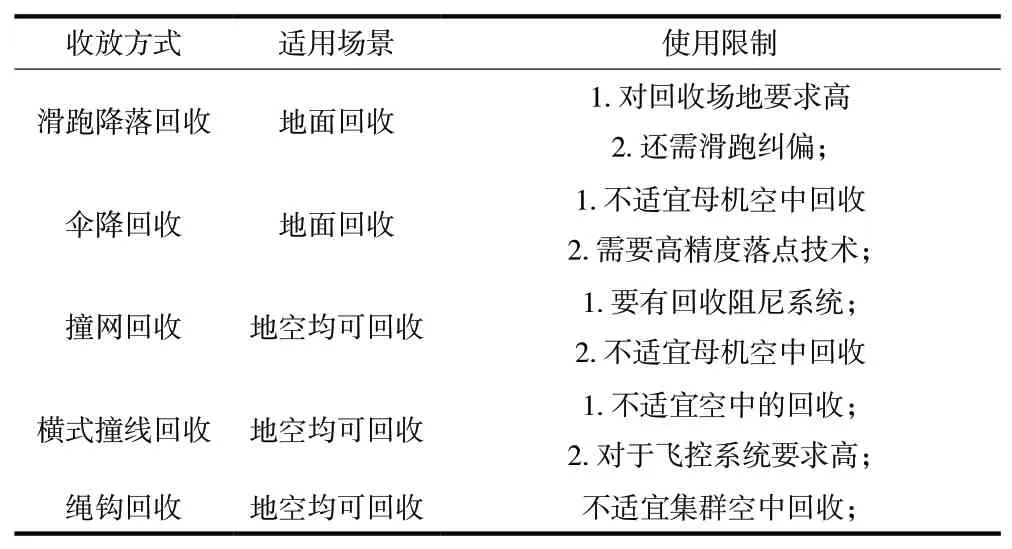
表 1 各类无人机回收模式对比表
1 回收释放机构工作原理
回收释放机构按工作状态分为回收与投放两个工作模式。
1.1 回收模式原理
根据图1部分工作流程,无人机飞抵目标运输机底部并保持相同的速度,待底部机舱打开后,露出引导槽,无人机进入导轨并刹车减速,飞控系统能够控制飞机的姿态和速度都保持在预定范围内[4]。此时相应的限位器闭合准备对接,其余限位器打开让出通道,当无人机与对应的限位器对接完成后,在动力滑块上的电动机地牵引下,到达限位处。此时,燕尾槽导轨两侧的热量检测传感器检测到飞机,表明飞机已到达限位处,热传感器会向控制机构输出高电平信号,止动锁弹出,防止无人机滑动。在止动锁完全弹出后,会触发相应的弹出指示开关,并且会将弹出完成的信号反馈给驾驶舱与控制系统。此为一架无人机回收的完整流程,而后重复该流程依次回收剩余无人机。

图1 工作流程总框图
当位于尾部的四号限位锁弹出后,经控制系统确定所有的机位的止动锁均处于弹出状态并且所在位置的热传感器都检测到无人机,表明所有无人机均到达指定位置,舱门关闭,回收完成。
1.2 投放模式原理
当到达预投放空域后,开始执行投放程序。飞机向上以一定的迎角爬升,以保证无人机离开机舱时有一定的适合的迎角,运输机底部机舱开启(若飞机以平飞的姿态开启机舱则要使飞机的飞行速度要保持在一定的标准上,否则可能导致无人机投放以后失速)。控制系统将相应通道的运动滑块两侧限位锁打开,相关电路控制机构再次感应到信号的变化(工作逻辑与回收模式相反),通过将电磁铁收回,释放止动锁并使动力滑块向后推出配合,使无人机滑出机舱,无人机经过短暂的自由落体后开始执行任务,当全部预投放无人机全部离开舱体,运输机底部舱门关闭,投放模式完成。
2 回收对接机构示意图
2.1 系统总图
各部件的名称与具体外观如图2所示,经过相关调研,翼展1.8 m的无人机携带相关设备后的重量约为18 kg,对接机构主要使用的材料为6061型铝合金。梁主要使用碳纤维材料材质的复合材料,由腈纶和粘胶纤维做原料,经过高温氧化碳处理而成,拉伸强度为2.5 GPa,模量为270 G,密度小,在冲击韧性方面表现优异[5]。
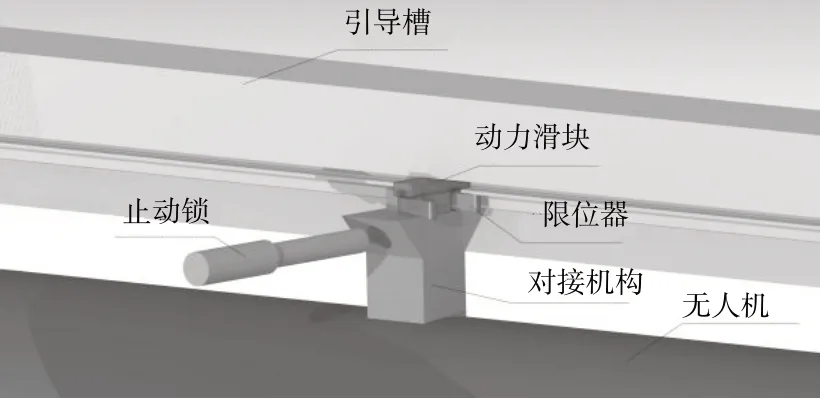
图2 对接机构总体示意图
各子系统的功能及设计尺寸具体如下:
2.2 动力滑块
动力滑块为无人机与机构完成对接后主要提供动力的构件,负责将无人机带到其相应的停放位置,并在此过程中控制其运行速度,其总体外观如图3所示。由于其中的控制杆在无人机进入会承受冲击载荷作用故对其进行力学校核。m
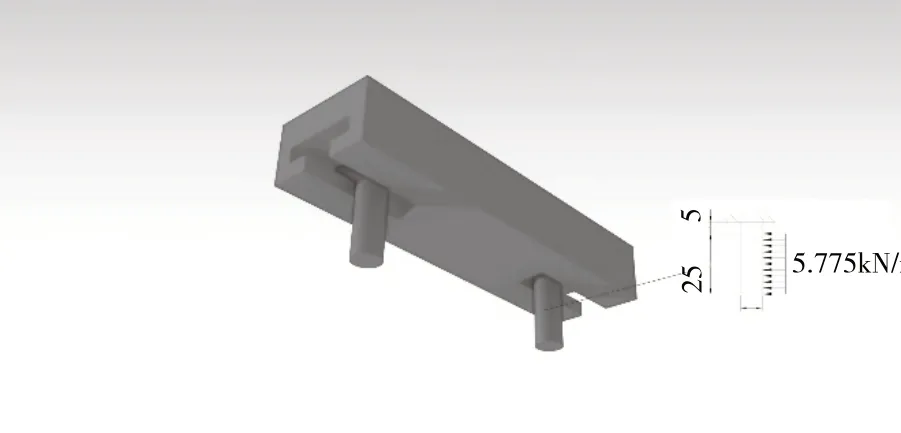
图3 动力滑块上的限位器控制杆
控制杆主要用于控制通道的大小,以保证飞机进入时最前方的限位器闭合准备卡位,后方的通道打开让开通道方便无人机通过。
在飞机进入燕尾槽导轨后,卡扣会被无人机推开,并在通过以后闭合,并且启动动力滑块,推着飞机向前运动。由于飞机进入时会对传动机构的开口控制杆产生冲击载荷,现对此进行校核。
限位器控制杆冲击载荷的校核:
预计飞机进场速度V1=2 m/s,冲撞结束以后的速度为V2=1 m/s,冲撞时间为0.2 s,设置安全系数ns=1.5。
冲击物的动能转化为杆的弹性应变能:

计算得冲击瞬间均布载荷为:q=5.775 kN/m
故最大弯矩为Mmax=2.526 N·m.
计算得固定端(危险截面)的最大拉压应力与最大切应力为
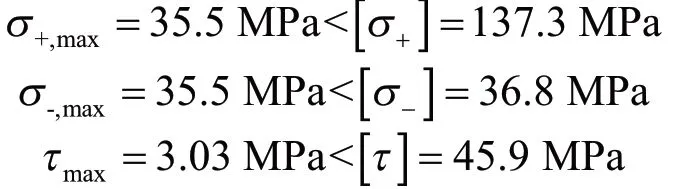
强度符合。
2.3 对接机构
对接机构为无人机与回收装置进行对接的主要构件并在连接后承受无人机自身的载荷故对图4中引出线所指示的截面进行拉应力校核:
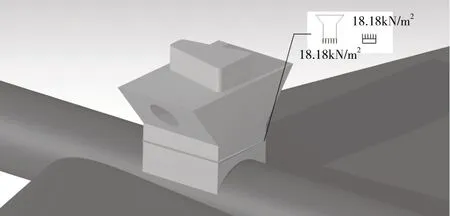
图4 无人机上的对接机构及其受力示意图
根据材料力学公式拉应力公式为:

考虑安全系数ns=5,则许用拉应力为:
计算得对接件收拉表面积:

实际受力面积为9.9×10-3m2,强度符合。
2.4 止动锁
如图5所示当飞机到达指定位置前止动锁收缩,当飞机到达指定位置后止动锁弹出。

图5 止动锁弹出状态示意图
飞机停止时的冲击载荷计算:
由于设计飞机于对接机构对接后的速度为1m/s,最后到达停止点时在动力滑块的阻尼力下减速到0.3 m/s,插销弹出制动的停止时间约为0.1 s。
根据动量定理得:
飞机冲击力F=54 N
由挤压应力公式得:

由剪切应力公式得:

强度符合。
2.5 燕尾槽导轨
燕尾槽导轨为本设计方案的核心部件。其上固定其他构件,起限制飞机飞行方向与减少对接抖动的作用,上端固定有止动锁,两边固定有光电门以检测无人机是否到达指定位置。因其为主要的承重机构,故需对燕尾槽和上方的承重梁进行校核。基本受力情况与总体外观如图6所示。

图6 燕尾槽导轨及其受力图
燕尾槽导轨[6]的校核:
由于燕尾槽上部用于放置传动原件,所以飞机施加给机构的载荷只存在于燕尾槽导轨部分。
抗剪疲劳强度校核:
由受力分析得,燕尾槽导轨两斜边受到的压力为140.583 6 N。
故X与Y方向上的分力为:

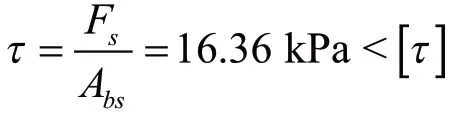
由受力分析可知a-a面受到的剪力:Fs=Fy
计算受到的剪切应力:
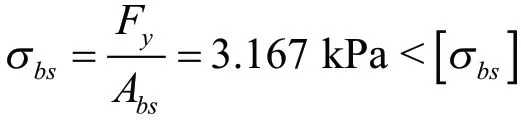
抗挤压疲劳强度[3]校核:
由于挤压力只存在于b-b截面
计算b-b面上的挤压应力σbs:
主承重梁的校核:
由于飞机于传动设备重量约为25 kg且仅分布于燕尾槽区域,如图7所示,受力模型可简化为:

图7 梁的受力分析图
梁的受力分析图:
做出剪力图与弯矩图为:
如图8图9受力图所示,梁的危险截面的弯矩远小于结构的许用弯矩(5.27×106 kN·m),强度符合(此处材料为碳纤维)。
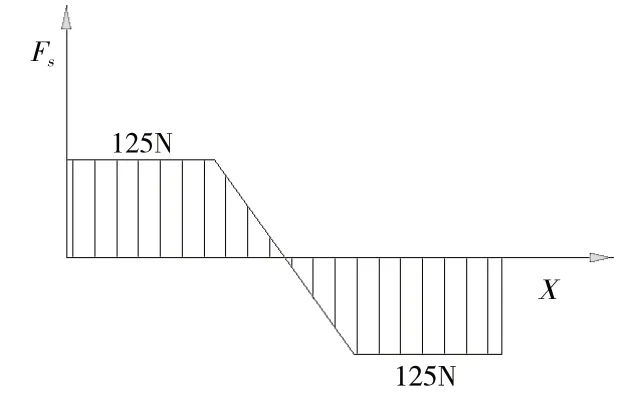
图8 剪力图
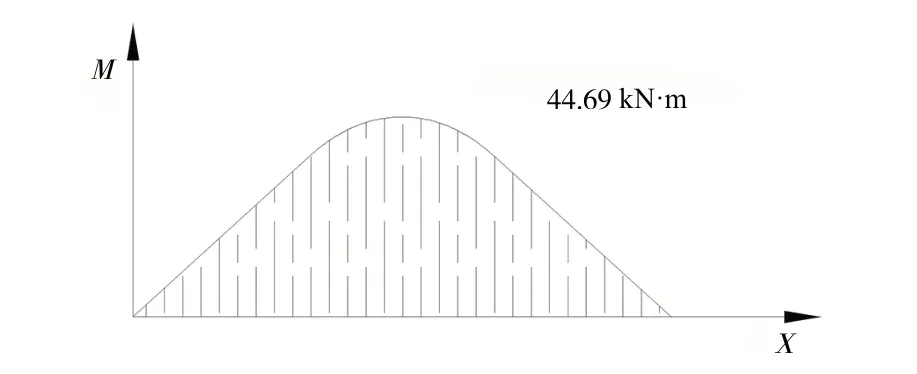
图9 弯矩图
2.6 限位器
限位器主要作用是卡住飞机上方的对接机构,以启动电动机,将飞机带到指定停止位置。设计思想类似于枪的弹夹卡位机构。总体外观如图10所示,无人机上放的机构呈现梯形,当飞机通过卡位机构时可以推开卡位部件,当飞机通过卡位机构后,部件收紧通道,卡住无人机对接机构的后方,并启动电动机推动无人机向前运动。
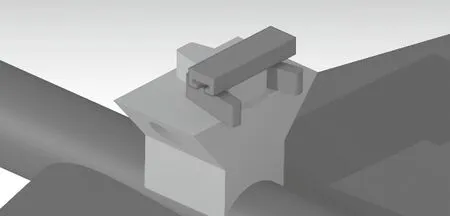
图10 限位器总图
3 结论
本文针对无人机回收释放系统进行了分析设计,并在此基础上进行了详尽的力学和电路计算,贴合多架无人机合理搭载的实际需求,得到如下结论:
(1)设计的回收释放机构分为机械承力和电路结构,承力结构与电路自动控制系统配合,可保证无人机回收过程可靠性与安全性[7]。
(2)采用热释红外传感器检测飞机,到达指定位置附近距离前置传感器的距离长短作为触发信号[8]。若距离到达设定标准及其误差范围内时,可使传感器传送信号给电路的转换部分,转换部分输出高或低电平,并送入到驱动部分,驱动电磁铁工作。
笔者拟在后续的工作中通过仿真验证和实验验证的方式对该方案的可行性进行检验。仿真检验主要是基于CAE软件对于该方案的结构可靠性进行分析以验证其可行性;实验验证计划分为两个阶段,第一阶段是在室内微小干扰的情况下无人机与静态机构的对接实验,以检验无人机飞控系统的可靠性;第二阶段拟在室外复杂条件下无人机与动态机构的对接实验,以检验该系统实际使用过程中的可靠性。
