基于改进TOPSIS法的过热汽温控制系统综合性能评价
2021-12-17郭建豪刘鑫屏
郭建豪, 刘鑫屏
(华北电力大学 控制与计算机工程学院,河北 保定 071003)
0 引 言
过热蒸汽温度的控制品质对火电机组运行安全以及经济指标有着重要意义。在深调峰及变负荷运行工况下会给过热汽温控制系统带来较大波动。此外,随着系统不断运行,环境的改变或系统老化都会降低系统的控制品质[1]。因此,为了保持当前系统最优的控制效果,需要合理的方法进行全面有效的评价控制系统的性能。
近年来针对控制系统性能评价的方法不断涌现,文献[2]以方差作为性能指标,求得串级回路输出最小方差的估计值,实现了对串级控制系统的性能评价。同样基于最小方差控制基准,文献[3]利用设计下的励磁控制系统与实际系统性能对比,依据最小方差下的性能指标,在线评估系统的控制性能。文献[4]以发动机怠速系统的PID控制器为研究对象,设计可测和不可测干扰两种情况,以线性二次高斯为基准对控制器性能进行评价分析,最终筛选出最优的PID控制器。文献[5]将参数整定的仿真数据作为基准数据,建立协方差的绩效评价指标体系,提出了火电机组负荷控制系统的性能评估方法。文献[6]针对最常用的串级控制系统,在设计未知扰动下利用最小熵准则,建立控制系统性能评估的通用有效指标。
以上的评价思路只是考虑了控制系统单向性能指标,结合系统多种性能的评价方法不断发展。文献[7]在设计不同扰动后,得到系统两种不同的性能指标,进而建立热工控制系统的综合性能评价方法。文献[8]依照火电机组评价指标建立的原则,采用层次分析法结合指标权重与量化结果构建了机组多层次的综合评价体系,最终实现火电厂实际运行状况的综合评价。文献[9]以火电厂主蒸汽温度控制系统为研究对象,建立了单值中智集的多属性评价模型,在分配系统各属性权重后依照相对贴近度函数值判断控制方案的优劣程度。
综上所述,本文首先采用马氏距离对传统TOPSIS法改进,然后基于多属性评价的思想,结合控制系统稳定性能、响应速度性能和抗干扰性能的多种评价指标,以博弈论理论结合主、客观法分配不同权重后,依照综合性能评价指标及相对贴近度评判各控制方案。从多个方面对系统的控制性能进行分析,得到的最终评价结果更加准确,能够全方面的对过热汽温控制系统进行性能评价。
1 过热蒸汽温度控制系统
对于过热蒸汽温度控制系统其温度的较大波动会直接影响汽轮机运行的安全,且一般要求保持在±5 ℃的范围内[10]。此外,作为一个存在大惯性等特性的复杂控制系统,对过热汽温的精确控制提出了较高的要求,其系统结构组成如图1所示,其中θ1为喷水减温器出口温度信号,θ2为惰性区过热器出口的蒸汽温度。

图1 火电机组过热蒸汽温度系统结构Fig. 1 Thermal power unit superheated steam temperature system structure
过热汽温控制系统针对温度的调节采用的是减温水量W。以减温器为中点,按照过热蒸汽的流通顺序,将减温器前称为汽温导前区,减温器后称为惰性区。过热汽温控制的难点在于影响温度变化的因素太多,例如锅炉负荷变化以及减温水量、减温水温度的变化等,且这些扰动大都是不可测的。
2 控制系统综合性能评价体系
控制系统综合性能评价体系以多属性决策思想为基础,采用马氏距离对传统TOPSIS法改进,并引入博弈论思想将主观和客观赋权法结合来确定指标权重。首先描述控制系统各性能指标,在规范化数据后结合权重利用TOPSIS法计算马氏距离以及相对贴近度,最终得到控制方案的评价结果,控制系统综合性能评价体系流程图见图2。
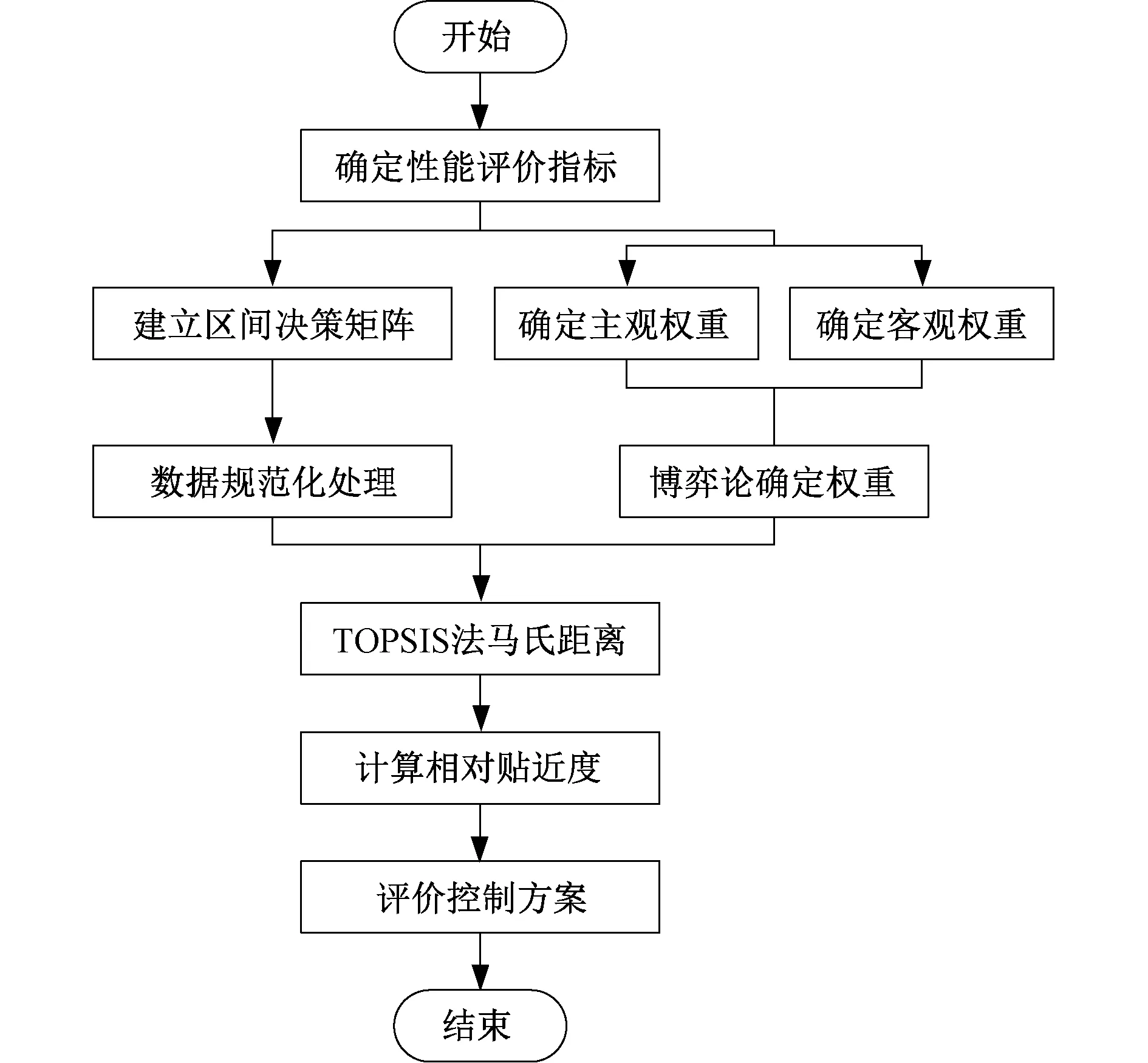
图2 控制系统综合性能评价体系流程图Fig. 2 Flow chart of comprehensive performance evaluation system of control system
2.1 控制系统性能评价指标
在选取控制系统性能评价指标时,基于多属性决策思想[11]考虑多种性能指标,再将各指标权重归一化后作为整个评价体系的基础。利用这一思想在考量多种属性的基础上建立火电机组控制系统综合性能评价体系。
为了能够准确且全面的评价控制系统的综合性能,选取与控制器稳定性、快速性和抗干扰能力相关的性能指标,包括超调量C1、绝对误差积分C2、穿越次数C3、上升时间C4、峰值时间C5、调节时间C6、扰动恢复时间C7和扰动峰值C8这8个指标。理论上当这些属性值能够控制在最小范围内时,系统性能达到最好的状态,但在实际运行中,PID控制器的多种性能不能同时达到最优控制效果。因此需要依据多属性决策的思想,综合考虑控制系统的多方面属性,分配不同权重能够解决单一属性评价的片面性问题,系统评价指标分类如图3所示。

图3 机组控制系统综合评价指标Fig. 3 Comprehensive evaluation index of unit control system
2.2 控制系统性能评价方法
2.2.1 组合权重的确定
在多属性决策中,对于指标权重的分配是非常重要的。当前,权重赋值的方法主要有主观赋权法、客观赋权法和组合赋权法[12]。在实际问题的求解过程中,单一的主观或客观赋权常常回因为忽略某一方面的信息造成赋权不准确,进而影响评估排序结果。所以采用博弈论思想[13],结合主观和客观赋权法来确定评估指标的综合权重,进一步提高权重计算结果的准确性。
(1) 作为主观赋权法确定权重的方法之一,层次分析法(AHP)[14]的详细计算步骤为
步骤1 建立判断矩阵,将n个元素之间相对重要性进行比较,得到相互之间的判断矩阵为
B=(bij)m×n
(1)
式中:bij表示指标bi对bj的重要程度,根据专家经验按照1~9比例对重要程度赋值。
步骤2 计算各指标权重,先对判断矩阵B中的行向量几何平均运算,在进行归一化处理,具体公式如下:
(2)
步骤3求解判断矩阵B特征根中的最大值,即
(3)
步骤4检验判断矩阵B的一致性,其一致性比例Cr计算公式为
(4)
式中:RI是一致性指标平均值,取值与评价指标个数n有关,当n=5时,RI=1.12。且当Cr<0.1时,判断矩阵B满足一致性标准要求。
(2) 熵权法(EWM)确定权重的依据是评价方案本身的特点,通过信息熵Ej来确定评价对象属性的权重[15],具体思路如下:
步骤1 依据标准化矩阵X计算Ej:
(5)
(6)
式中:i=1,2,…,m;j=1,2,…,n。
步骤2 确定第j个评价指标的客观权重为
(7)
(3) 博弈论确定评价指标的综合权重,其基本思想是选取不同赋权方法求取各指标权重,在假设各权重向量相互独立的基础上,协调各类赋权法。对各指标权重进行优化重组,提高权重值的准确性。具体步骤如下:
步骤1 结合Z种方法计算权重,Z个向量线性组合:
(8)
式中:w为Z种方法的综合权重向量集,且权重集wz=(wz1,wz2,…,wzm),z=1,2,…,Z。
步骤2 对权重向量优化,求取w和wz的最小差值,即
(9)
步骤3 对上式一阶导数求导可得
(10)
步骤4 得到了θ进行归一化处理,即
(11)
步骤5 最终确定综合权重:
(12)
基于此,在控制系统性能评价体系中确定各指标的相对重要性,区别对待不同评价指标。综合权重值越大说明该指标对控制系统品质影响因素越大,反之越小。
2.2.2 改进的TOPSIS法
逼近理想解排序(Technique for Order Preference by Similarity to an Ideal Solution, TOPSIS)是一种简便的多目标决策分析法[16],又叫优劣解距离法,其中正负理想解能够清晰的反映评价对象与参照物之间的关系。
对于传统的TOPSIS法,其距离方式通过欧式距离公式计算所得,且要求所选择的指标之间无关联性。但在实际应用中,各系统中的决策对象之间会存在某些关联,数据之间的相关性使得欧氏距离公式下的结果不准确,且如果所选择的指标数据之间存在较大的相关性,那么对结果的影响越大,最终的决策结果将不再准确。为了消除这一不利因素,利用马氏距离取代欧式距离,进而改进传统的TOPSIS法[17]。其中所采用的马氏距离能够有效表示出两个对象之间的相似度。采用马氏距离改进后的TOPSIS法的具体步骤如下:
步骤1 建立评价方案决策矩阵X=(xij)m×n
式中:xij为第i个样本第j个指标的原始数据,其中i=1,2,…,m;j=1,2,…,n。
步骤2 数据规范化处理,由于属性间存在量纲相异的问题,因此需要先对样本的原始数据进行规范化处理。将各属性指标分为效益型和成本型两种指标,其中效益型指标值越大越好,相反成本型指标值越小越好,不同类型则对应不同的规范化方法。
当xij为效益型数据时,数据规范化方法为
(13)
当xij为成本型数据时,数据规范化方法为
(14)
式中:rij为第i个样本第j个指标的规范化数据。
步骤3 利用博弈论思想确定各指标的权重后,再求得第i个样本第j个指标的加权规范化数据,即
vij=rij×wj
(15)
步骤4 确定正、负理想解。正理想解为所有决策对象中属性值最优者,相反负理想解为所有决策对象中属性值最劣者,即
(16)
(17)
步骤5 计算各方案到正、负理想解的马氏距离,则各方案到正理想解的距离为
(18)
各方案到负理想解的距离为
(19)
其中正定矩阵用来表示马氏距离和欧氏距离两者的关系,是n个属性变量矩阵的逆矩阵,正定矩阵为
(1) 当正定矩阵为单位矩阵时,说明指标间无明显差异,马氏距离不再具有明显优势,将退化成欧氏距离。

步骤6 计算相对贴近度,相对贴进度的数值反映了待评价控制系统与正、负理想解之间的接近程度,其第i个方案控制系统综合性能的相对贴进度为
(20)
式中:Fi的取值范围为(0,1),并根据Fi值的大小对各方案控制系统性能品质排序,及Fi值越大,表明该控制方案越接近正理想解,控制系统性能越优;反之Fi值越小,表明该控制方案越接近负理想解,控制系统性能越差。
3 系统仿真验证
3.1 机组评价指标选取
以文献[18]中某超临界机组600 MW直流锅炉为研究对象,包括50%、70%、100%3个工况,由于机组在较低负荷下运行时,其PID控制效果相对较差。在评价控制系统性能好坏的前提下,选取典型的50%工况下过热蒸汽温度控制系统进行综合性能评价,该工况下的控制系统综合性能评价体系成立,则对其他负荷下控制系统的评价同样适用。在过热汽温串级控制系统中,导前区和惰性区的传递函数分别为
(21)
(22)
在过热蒸汽温度串级控制系统中,副回路的主要任务是消除减温水流量自身的扰动,能够对汽温起到一种粗调的效果,因此副调节器一般选择比例调节器。而主回路调节器能够使过热蒸汽温度保持在设定值附近,故常采用比例积分微分调节,GPID(s)=KP+TI/s+TDs。设置副调节器比例系数KP=5后,由于文献[19]中针对主蒸汽压力-给煤量串级控制系统中内外回路各PID参数有不同的整定方法,如Z-N整定法、PSO算法和SA-PSO融合算法整定。因此选取其中最常用的Z-N整定法对同样为串级回路的过热蒸汽温度控制系统中的主调节器PID进行参数整定。
选取主回路中多种PID控制器方案下的火电机组过热蒸汽温度控制系统动态响应曲线如图4所示,运行500 s时在主回路中加入幅值为1的阶跃响应(烟气温度扰动),其中控制器参数及输出属性值见表1。

表1 控制器参数及输出属性值Tab.1 Controller parameters and output attribute values
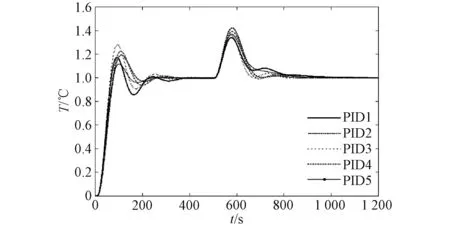
图4 过热汽温控制系统动态响应曲线Fig. 4 Dynamic response curve of superheated steam temperature control system
3.2 评价体系实施步骤
(1) 数据规范化处理
先对控制系统各性能指标的原始数据进行规范化处理。由于选用的控制系统评价指标都属于成本型指标,因此按照式(14)进行规范化处理,结果如表2所示。
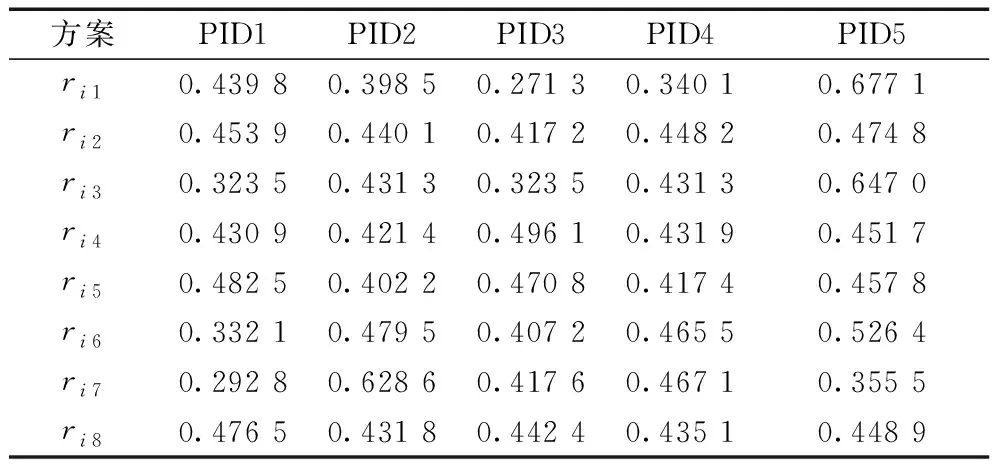
表2 规范化数据Tab.2 Normalized data
(2) 确定指标的权重
对数据进行规范化处理之后分别按照AHP、EWM和博弈论确定各指标权重,结果见表4。其中AHP按照1~9比例对各指标之间重要程度赋值,建立相应的判断矩阵B如表3,且按照公式(3)和(4)计算矩阵B的Cr=0.084 1,Cr<0.1,通过一致性检验。

表3 判断矩阵BTab.3 Judgment matrix B

表4 各指标权重Tab.4 Weight of each indicator
(3) 确定正、负理想解
先按照式(15)计算得到各指标的加权规范化数据如表5所示。然后根据式(16)、(17)以及表中的加权规范化数据得到各指标数据的正、负理想解分别为

表5 加权规范化数据Tab.5 Weighted normalized data
S+=(0.167 7,0.017 6,0.140 5,0.024 3,0.029 7,
0.069 8,0.141 6,0.014 1);
S-=(0.067 2,0.015 5,0.070 2,0.020 6,
0.024 8,0.044 0,0.066 0,0.012 8)
(4) 计算各方案到正、负理想解的距离
按照式(18)和(19)得到各方案到正、负理想解的距离,结果如表6所示。
(5) 计算各方案与正理想解的贴近度
按照式(20)得到相对贴近度,结果如表6所示。
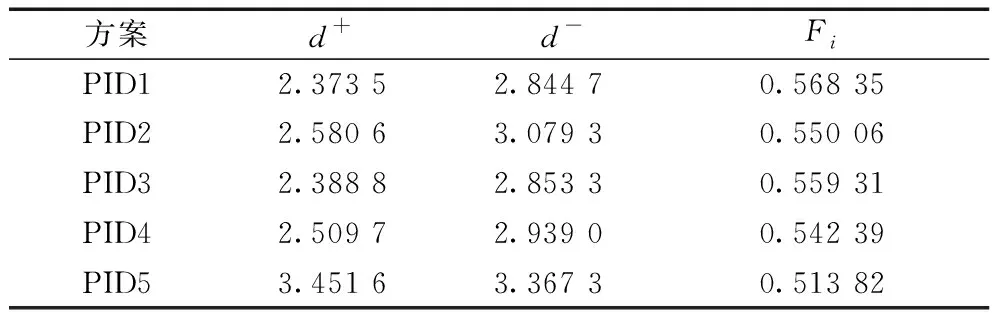
表6 正负理想解距离和相对贴近度
通过表6可知仿真下的过热汽温控制系统中,比较5种PID控制方案的相对贴近度数值,PID1的综合控制效果最好,PID5的控制效果相对较差,其系统的动态响应曲线波动较大。各方案的综合性能排序为:PID1>PID3>PID2> PID4>PID5。
由于文献[20]中所采用的传统TOPSIS法中有详细的计算步骤,并针对火电厂控制系统信息安全风险进行了成功的评价分析。因此,为了验证改进的TOPSIS方法的有效性,采用其中的传统TOPSIS法同样得到过热汽温控制系统各方案PID控制下性能指标数据的相对贴近度,与文中改进方法得到的数据对比如图5所示。
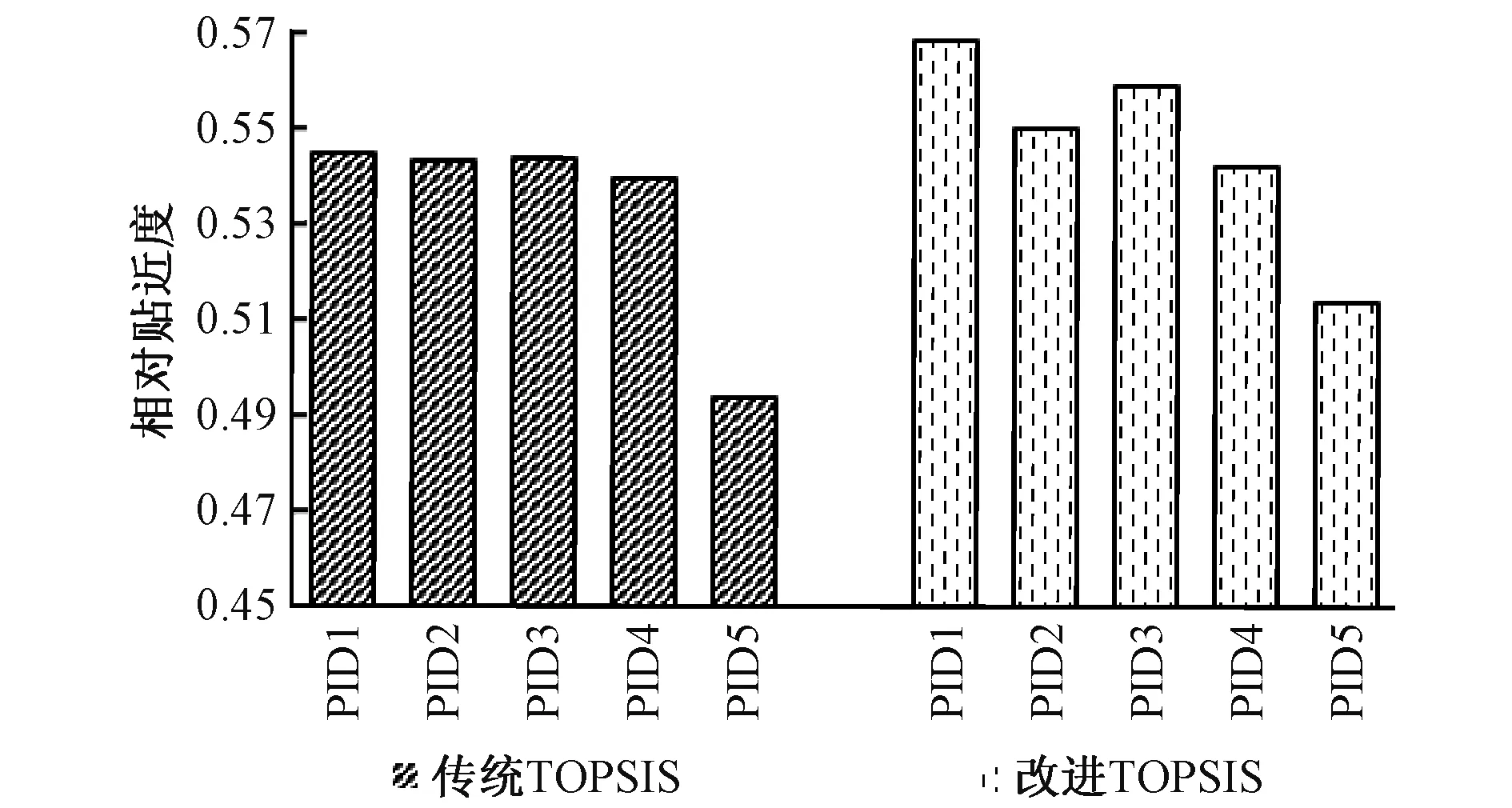
图5 相对贴近度对比Fig. 5 Comparison of relative closeness
由图5可知,两种方法所求得各控制方案的相对贴近度整体趋势是一致的,但是改进的TOPSIS法能够明显的找出相对最优控制方案和最差控制方案。而且改进的TOPSIS法能明显区别PID1、PID2和PID3方案的控制效果,因此能够更加准确的对控制系统进行综合性能评价。
此外,基于本文建立的综合性能评价体系是否可应用于各类控制系统,即该评价方法的普遍适用性。选取应用广泛且经典的模糊控制,结合各PID控制方案,组成过热汽温模糊PID控制系统。采用文献[21]中的模糊控制器设计思路,包括模糊化模块、解模糊化模块、模糊规则库(ΔKP、ΔTI、ΔTD的模糊控制规则表)以及模糊推理模块。然后搭建过热汽温模糊PID控制系统仿真模型,副回路依然采用比例调节器,而主回路在原PID控制器的基础上(除去相对性能最差的PID5)增加了模糊控制器。
为了方便评价体系的计算,同时对比模糊PID与传统PID控制,在过热汽温模糊控制系统中,PID控制器初始值设置不变。在输入阶跃信号后系统动态响应曲线如图6所示,同样500 s时在主回路中加入阶跃干扰。其次过热汽温控制系统的PID控制方案与F-PID控制方案的动态响应对比曲线如图7。
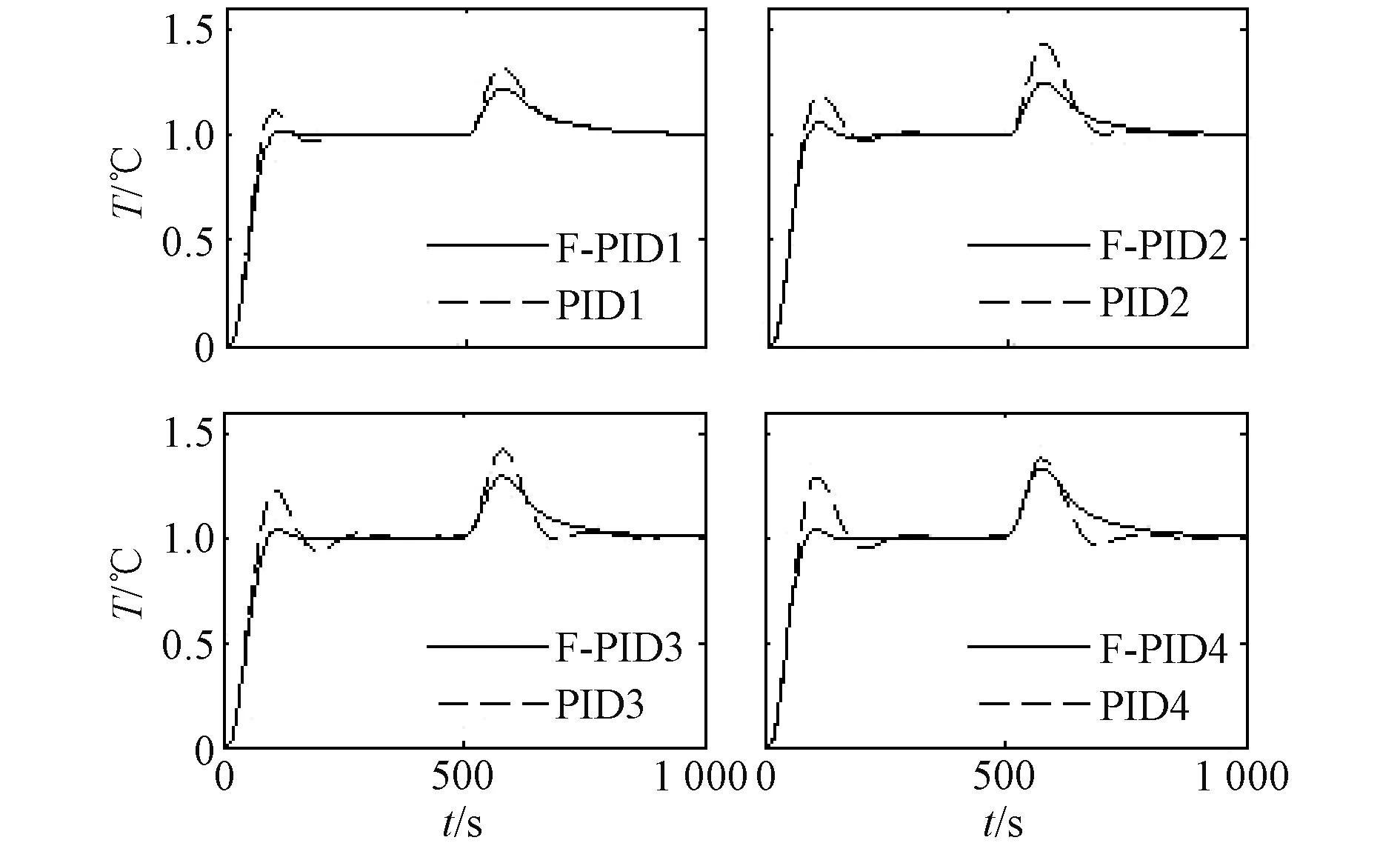
图6 过热汽温模糊控制系统动态响应曲线Fig. 6 Dynamic response curve of fuzzy control system for superheated steam temperature
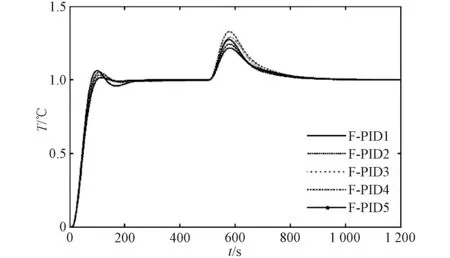
图7 两种控制方法下系统响应曲线对比Fig. 7 Comparison of system response curves under two control methods
利用本文建立的控制系统综合性能评价体系,得到最终的4种模糊PID控制方案的相对贴近度如表7所示。
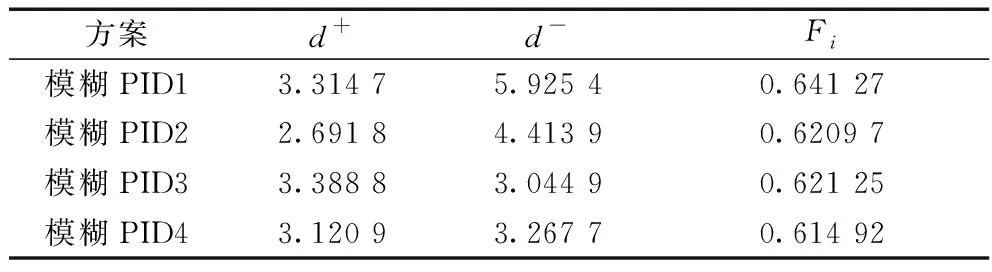
表7 各方案与理想解的距离及相对贴近度
从图7响应曲线对比可以看出,传统串级PID控制和F-PID控制方案中整体上F-PID的调节过程更加稳定,能够较好的平衡扰动,对过热汽温具有良好的控制效果。且依据表6和表7中综合性能评价体系得到的相对贴近度可知,串级模糊控制系统在稳定性、快速性和准确性方面表现出更良好的控制品质,评价结果与图表信息一致。
此外,F-PID1方案的综合控制效果最优,F-PID4方案相对较差,评价结果为F-PID1>F-PID3> F-PID2>F-PID4,与PID控制方案综合评价的结果一致。说明在最优的PID控制的基础上建立的模糊PID控制也是相对最优的控制方案。在建立的综合性能评价体系下,虽然F-PID2和F-PID3控制方案的相对贴近度相差较小,但依然可以清晰的分辨出最优、最差控制方案,证明该评价体系能够有效的判断各类控制系统的综合性能,也为其它结合PID控制器的控制系统提供一个基准。
4 结 论
(1) 本文针对火电机组过热蒸汽温度控制系统,利用改进的TOPSIS法结合博弈论理论建立了控制系统综合性能评价体系。依据多属性评价的思想,综合考虑控制系统的多种属性,得到更加全面的评价结果。
(2) 通过对比评价各PID方案和模糊PID方案的控制性能,说明该体系可用于不同控制策略下的系统性能评价。整个综合性能评价体系算法简便,对控制系统的输出数据进行分析处理,能够有效解决火电机组控制系统性能的综合评价问题,为保障控制系统的综合性能提供依据。
