基于K60 单片机的无人车编队汇入控制与管理系统
2021-12-17李子博孙宁
李子博,孙宁
(南京林业大学 汽车与交通工程学院,南京 210037)
0 引言
无人物流车作为较早被应用于物流行业的智能交通运输系统,已在道路运输及仓储环节中初具使用规模[1]。但由于当前无人物流车系统车辆智能化程度较低,仍大规模采用人工调度管理等因素,造成调度管理效率较低,车辆关键信息更新滞后,难以组成稳定车辆编队,限制了其优势的发挥且实效性较低。
目前,国内对于无人物流车系统的研究方向比较分散,未能形成一套全面的系统设计与配套软硬件整合解决无人物流车系统实效性较低的问题[2]。
本文设计了一种基于K60 单片机的无人智能物流车编队汇入控制与管理系统。系统通过硬件模块完成VANET 背景下车辆自主环境感知,决策规划与协同运动,完成编组整合的柔性车队,相对于单车或者分散车队行驶具有更高的稳定性和鲁棒性,并且可减小空气阻力节约能源[3]。同时,车辆与车队的实时信息通过GPRS 同步传输至上位机管理界面,实现无人物流车的智能化编队汇入控制与管理,进而从一定程度上提高无人物流车系统对于物流行业的实效性。
1 系统模型
如图1 所示本系统以K60 单片机为核心,通过车载局域网(VAN)实现各模块间数据信息传输。当车队正常行驶时,系统利用无线通讯模块向上位机管理界面实时上传当前速度、位置、道路情况、网络情况等车队关键信息,当车辆收到汇入指令后,利用无线通讯模块连接汇入车队车载自组织网(VANET)。一方面,将本车速度、位置等信息上传汇入车队并获取车队速度、位置等信息,完成信息交流共享;另一方面,发出协作申请,中心决策模块处理解算数据,完成汇入轨迹规划并通报汇入车队。最终由中心决策模块协调车辆与汇入车队协同行驶。利用融合传感器与综合定位模块实时监测汇入进程并同步上传至上位机管理界面,通过运动控制模块对车辆速度、加速度、姿态等进行实时跟踪,修正完成汇入。

图1 系统结构图Fig.1 System structure diagram
2 硬件电路设计
系统硬件电路主要包括:供电模块、融合传感器模块、综合定位模块、无线通讯模块、中心决策模块、运动控制模块等。
2.1 供电模块设计
由于系统各硬件电路运行均需要3.3~6.0 V 电压,因此供电模块选用7.2 V 镍氢蓄电池组为电源。由LM2577 稳压芯片控制的电源管理电路完成稳压调节及电平转换[4],将7.2 V 电压转化为3.3 V、5 V、6 V 电压,进而为各模块提供与之需求相匹配的稳定电源输出。
2.2 融合传感器模块
融合传感器模块采用机器视觉与雷达融合的技术方案。利用BP 神经网络模型算法完成数据转换及数据相关与融合推理,实现多传感器环境感知信息融合互补。弥补单一传感器精度较低,稳定性较差的缺陷,为换道汇入的实现提供精准的车辆运动信息、道路信息与轨迹监测[5]。
融合传感器选用FQY888A 型CCD 摄像头与HDL32E 激光雷达[6-7]。如图2 所示,FQY888A 分辨率为350 线,可输出制式PAL/NTSC 标准视频信号至LM1881 芯片,进行视频同步信号分离。结合图像信号,由K60 单片机完成解析处理,得到路径数据。HDL32E 激光雷达共有32 线激光扫描束,垂直方向可视范围41.3°,水平视野360°,角度分辨率0.09°,距离精度2 cm,可实现较全面的高精度实时环境感知。

图2 CCD 图像传感器电路Fig.2 CCD image sensor circuit
2.3 综合定位模块
综合定位模块采用GPS 定位、SLAM 并发建图与定位以及VANET 车载自组网结合的技术方案[8]。利用贝叶斯网络,将来自GPS 的车辆位置坐标、来自VANET 的车间相对距离、方位角信息以及SLAM 构建电子信息地图,进行信息整合,为换道汇入行为提供较为精准的车辆实时定位信息。
如图3 所示,GPS 接收机选用的LEA-5X 模组[9]。首次定位时间<1 s,最大更新速率<4 Hz,定位精度Auto <2.5 m,SBAX <2 m,定时精度RMS <50 ns。对车辆位置的绝对坐标定位精度较高,稳定性强。

图3 GPS 定位模组电路Fig.3 GPS positioning module circuit
2.4 无线通信模块
无线通信模块采用GPRS 与Zigbee 结合的技术方案。利用GPRS 传输距离远、传输速率高、接入迅速的特点,实现车辆车队与上位机管理界面的关键信息实时同步传输。ZigBee 具有功耗低、延迟低、网络容量大且便于嵌入智能传感器的特点,用以实现VAN 车载局域网与VANET 车队自组织网络的搭建,完成单车信息融合与车队信息广播共享。
如图4 所示,GPRS 选用MC39I 模块,其发送功率为31~33 dBm、接收灵敏度-102~-105 dBm、40引脚ZIF 连接器可完成指令、数据、语音信号及控制信号的双向快速传输,实现车辆/车队与上位机管理界面实时数据传输及指令传达。
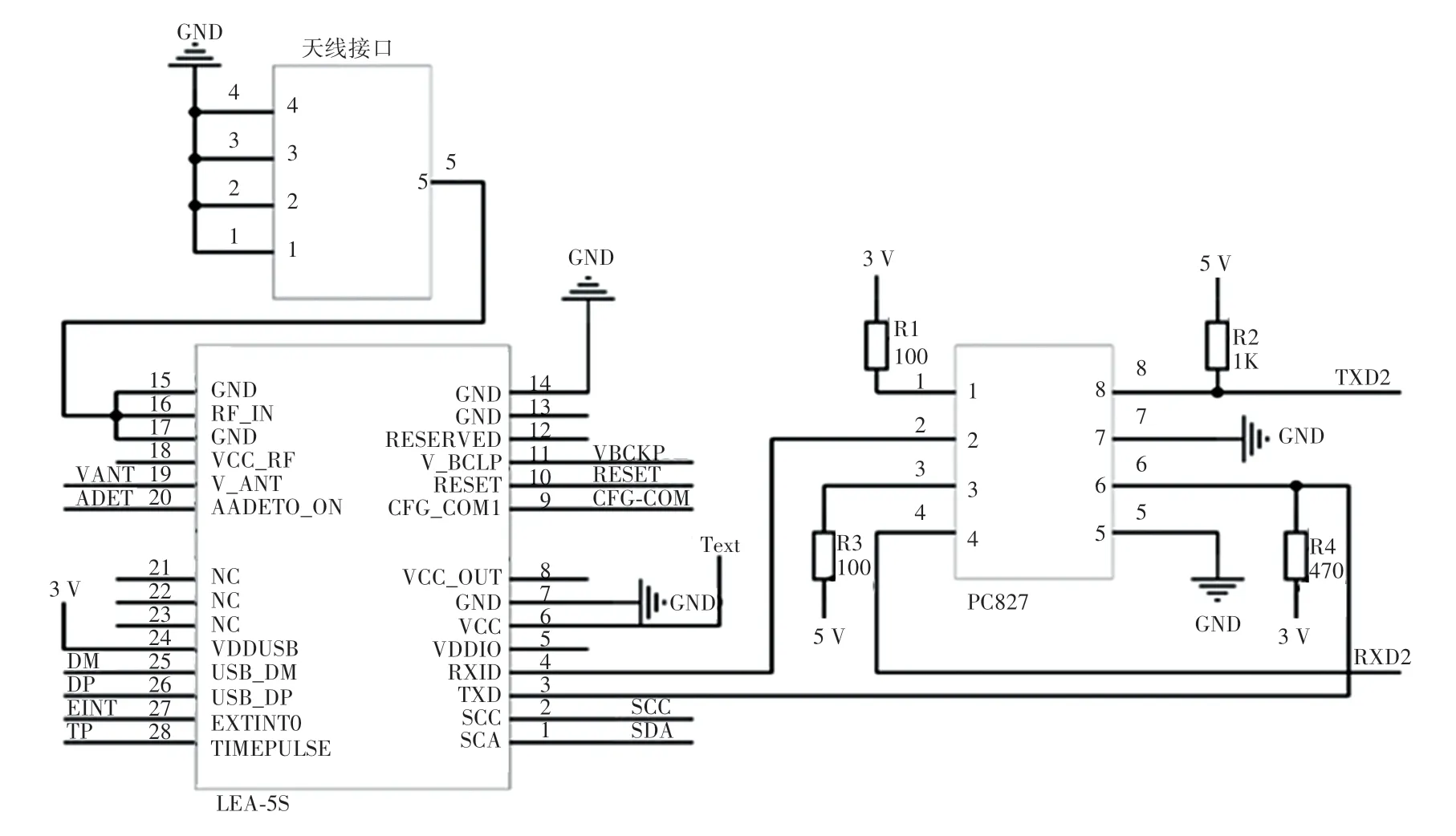
图4 GPRS 通信模组电路Fig.4 GPRS communication module circuit
ZigBee 选用CC2530 模块,如图5 所示。其数据传输速率250 kbps、接收灵敏度-94 dBm,设有4总线SPI 接口[10]。利用其搭建起的VAN 车载局域网与VANET 车队自组织网络,单车可完成各模块与传感器采集信息的融合,车队可完成信息广播共享,进而得到更精确的车辆速度加速度,相对位置等信息。

图5 ZigBee 通信模组电路Fig.5 ZigBee communication module circuit
2.5 中央决策模块
中央决策模块采用K60 单片机作为处理决策核心。K60 是基于ARM Cortex-M4 内核的32 位MCU,将Cortex-M 系列处理器低功耗与良好的信号处理能力相结合。内核自带DSP 指令性能,可达1.25 DMIPS/MHz,具有高性能、高精度的混合信号能力,运算速度快、精度高[11]。可实现对车辆速度、加速度、相对位置,道路环境,车队状态等融合信息的综合计算处理。以解算出的高精度数据,支持车辆换道汇入轨迹规划,进而完成VANET 车队自组织网络背景下的多车协同驾驶决策协调。
2.6 运动控制模块
如图6 所示,运动控制模块采用以MC9S12DG128单片机为核心的模糊自适应PID 控制器[12]。单片机对车辆前瞻量、速度偏差、位置偏差等基本量的采样周期为10 ms。通过模糊逻辑算法输入非线性量误差e 与误差变化Δe,以满足不同时刻3 个PID 闭环参数的确定。同时不断监测e 与Δe 进而控制参数在线自适应整定,得到比传统PID 控制器更好的控制性能,实现准确快速的车辆换道汇入轨迹跟踪与姿态修正[13]。
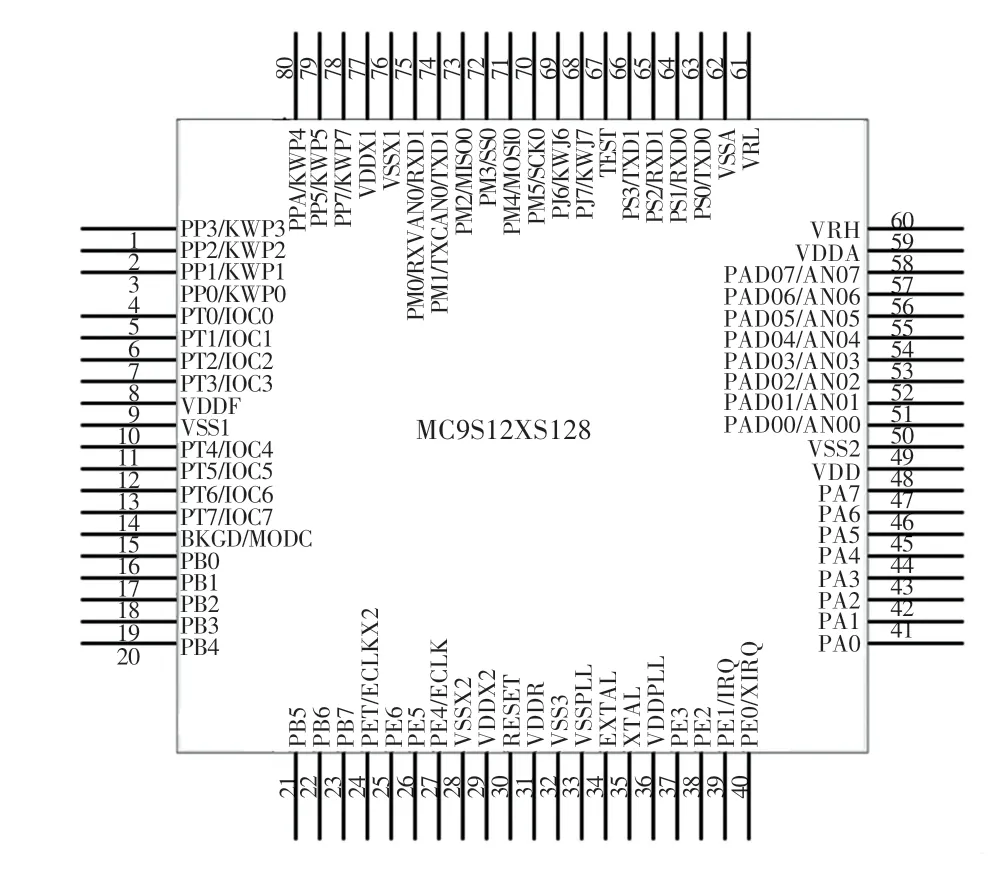
图6 MC6S12XS128 最小系统电路Fig.6 MC6S12XS128 minimum system circuit
3 系统软件设计
软件设计选用Visual Basic 6.0 软件,搭建无人智能物流车编队汇入控制与管理系统界面。
如图7 所示,软件主界面由车队信息查询管理,车队编组规划,已编组车队汇入监测,已编组车队管理,问题反馈,个性化设置6 个区域组成。普通用户可使用车队信息查询、已编组车队实时状态监测、已编组车队运行轨迹查询等功能;管理员在此基础上可使用车队发车管理、车队编组规划、已编组车队汇入监测等功能。

图7 系统主界面Fig.7 Software main interface
利用图8 所示界面,可以选择不同出发地与目的地的车队。通过系统车载单元实时回传的数据,可查询已出发车队自组织网络运行情况、车队包含车辆数、车队车速、当前位置、预计到达时间等信息;查询未出发车队预计出发时间、到达时间、车队包含车辆数等信息。管理人员可设置未出发车队预计出发时间。

图8 车队信息查询Fig.8 Fleet information inquiry
管理人员将车队信息代入最大收益模型,结合道路信息,计算出车队编组汇入的时间节点与位置信息[14]。通过图9 所示界面,完成车队编组规划并向各车队传输汇入点信息与汇入指令。各车队在指定时间节点与汇入位置,利用车载汇入控制单元完成柔性车队整合编组。

图9 车队编组规划Fig.9 Fleet formation planning
如图10 所示,通过系统车载单元,对车辆换道汇入过程中实时状态采样检测,并同步上传至本界面。一方面可实现对各车队巡航车速、实时横纵向加速度、实时航向角、实时车间距等关键车辆信息的远程监测;另一方面,综合数据形成车辆换道汇入轨迹图像、加速度变化趋势图像,为管理人员评估车队换道汇入过程的安全性提供分析依据[15]。

图10 已编组车队汇入监测Fig.10 Organized fleet merging monitoring
各车队完成换道汇入编组为柔性车队后,通过VANET 车队自组织网络以及各车系统车载单元,对车队的速度、位置、车队自组织网络的信号强度、延迟等信息实时检测,并上传至图11 所示界面。管理人员可通过界面信息对柔性车队运行情况进行监测,点击自检按键对柔性车队的稳定性进行评估,点击自主规划按钮对已到达柔性车队的下达分离与独立路线规划指令,进而完成已编组车队的远程监测与管理。

图11 已编组车队管理Fig.11 Organized fleet management
4 结束语
本文设计的无人智能物流车编队汇入控制与管理系统以K60 单片机为核心,通过硬件模块完成VAN 与VANET 的搭建、车辆车队关键信息的精确感知与实时上传、换道汇入的处理决策、路径规划、协同驾驶、以及换道汇入过程的轨迹跟踪与姿态修正,通过软件模块完成无人智能物流车编队的远程监测与管理。在一定程度上解决了当前无人物流车系统对于物流行业实效性较低的问题,具备可行性。
