雷达技术在感应开关中的应用
2021-12-15李国枭刘会泽胡文涛
李国枭 刘会泽 胡文涛
(宁波公牛电器有限公司 慈溪 315314)
引言
从20世纪初,雷达概念基本形成后的一百年内,相关技术迅速发展。早期只限于军用航空航海,时至今日已经在智能设备、自动驾驶汽车等领域大规模民用。频段方案也发展出:超视距雷达、微波雷达、毫米波雷达、激光雷达等。
随着生活水平的不断提高,人们对智能家居的需求也日益增长。存在感应技术在酒店控制、工业照明、智能安防等应用场景有着巨大需求。早期的相关产品大多采用红外模块、声控模块和光敏电阻来实现。而得益于电子半导体技术的发展和相关元器件价格的降低,现阶段使用高频雷达实现这一功能的存在感应开关得以实现。
本文浅析一种雷达在存在感应开关中的应用方案,并通过实际测试验证各频段方案与感应开关应用场景的契合度。
1 频段方案
本次实验分析的频段方案,从低到高可分为:红外、多普勒(CW)微波、60 GHz毫米波、77~ 79 GHz毫米波。其中红外又分为(被动)PIR和主动PIR方案:多普勒(CW)微波分为24 GHz和5.8 GHz方案;60 GHz毫米波分为FMCW毫米波雷达和CW毫米波雷达。
1.1 方案选择
1.1.1 红外PIR
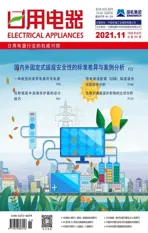
现有的产品低成本方案大多采用红外人体感应技术。使用菲涅尔镜片,增强对人体的红外辐射敏感度,同时抑制环境干扰影响。通过菲涅尔透镜的聚焦作用,红外信号将检测区内分为若干个明区和暗区;当人体经过检测区时产生变化热释红外信号,从而产生变化电信号(图1)。
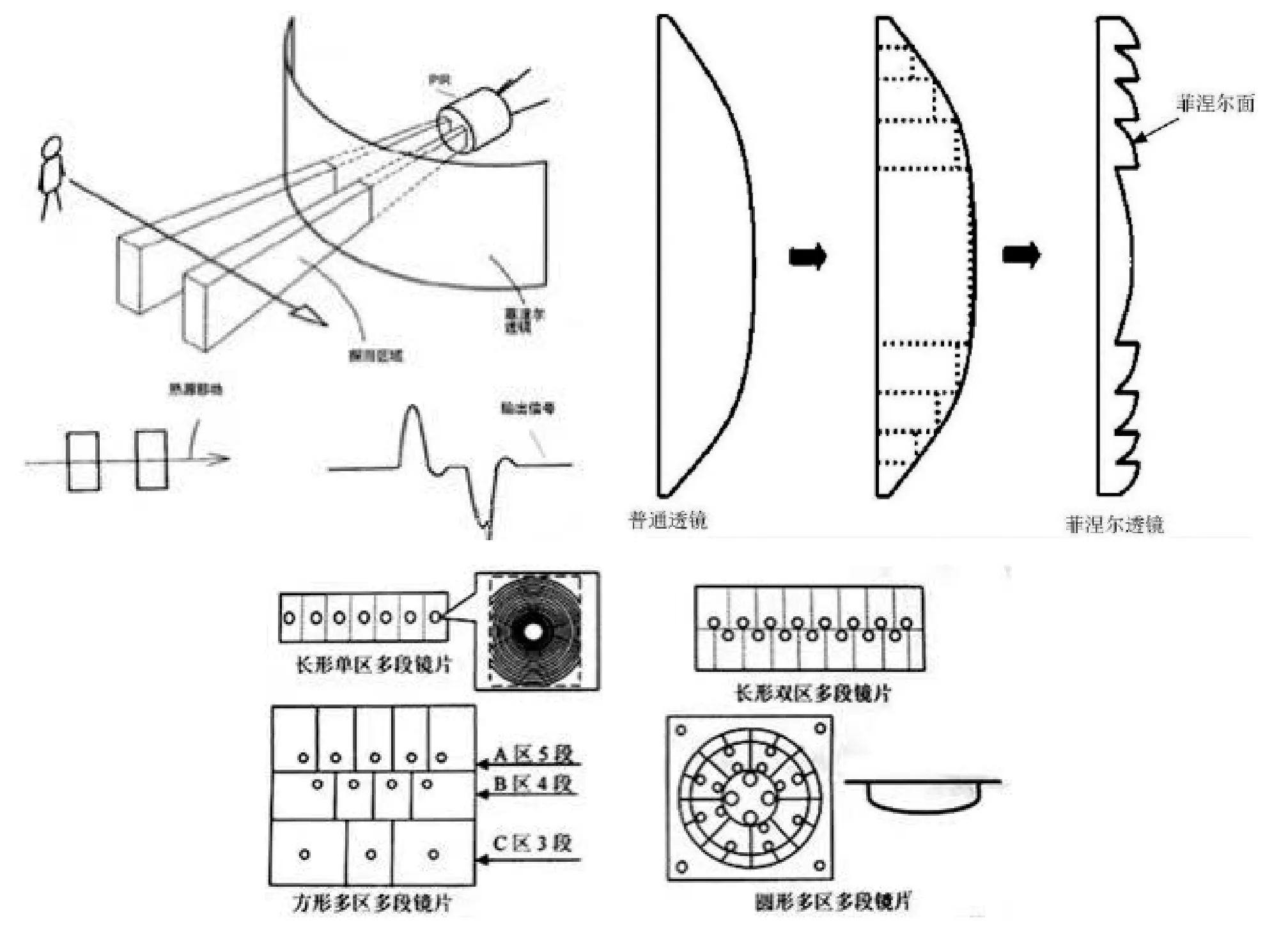
图1 红外技术原理
此类技术相对成熟,价格低廉、功耗低(微安级功耗,适用于单火线开关),被动PIR不会发出任何类型的辐射,隐蔽性较好。但同时缺点也比较明显:
1)受热源干扰。
2)被动红外穿透力差。
3)易受射频辐射干扰。
4)环境温度和人体温度接近时,灵敏度低。
5)横向运动效果尚佳,径向运动检测能力较差。
6)需要在外面板安装涅菲尔透镜。
综上各种缺陷,很多场景已经不能完全满足用户需求。
1.1.2 多普勒雷达
多普勒雷达是一种较成熟的脉冲雷达(图2)。相比红外PIR方案,多普勒雷达解决了热源干扰的问题,检测灵敏度也不受温度影响。微波信号可以穿透玻璃、薄木板等墙体实现检测,角度大,反应快。同时因其运用了多普勒频移效应,故对径向运动人体的检测能力大大提高,但横向的运动难以监测,且依然存在难以检测静物,精确度低,难以抵抗电磁干扰等问题。这些是多普勒雷达的物理缺陷,难以弥补。
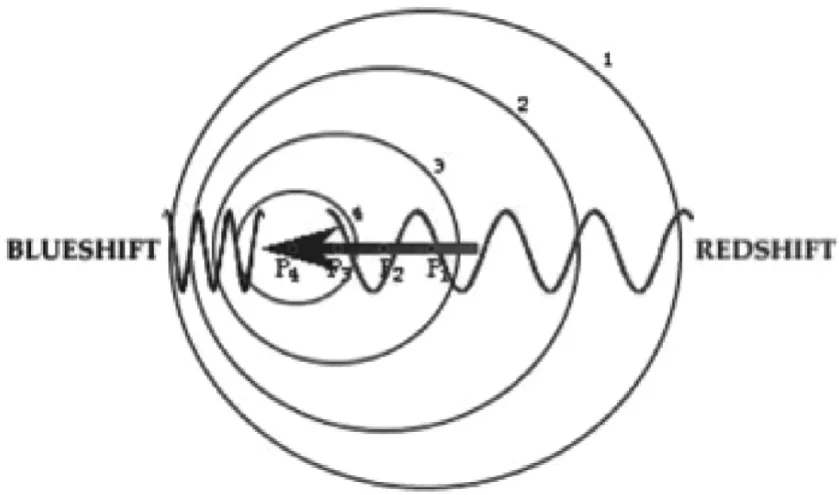
图2 多普勒原理
1.1.3 FMCW毫米波雷达(77~79 GHz毫米波)
FMCW毫米波雷达是指调相连续毫米波雷达。高频FMCW毫米波雷达几乎满足所有对人体存在感应传感器的全部要求,检测精准,防干扰、耐污防潮。
但是,一方面因为其较高的功耗和较大的模块体积,难于在小场景设备中应用;另一方面囿于法律法规相关限制,77 GHz~79 GHz的FMCW毫米波雷达只能应用于汽车领域。故排除此方案。
1.1.4 60 GHz毫米波
此频段涵盖了FMCW和CW毫米波雷达两种方案。理论上,越高的雷达频率对应着越高的检测分辨率,和更好的检测效果。
从生理学角度来看,正常人体生理活动可由人体的体表微动信息来反映如图3,例如可通过胸腔的振动来得到呼吸、心跳等活动信息。心搏引发的胸壁位移幅度为0.6 mm,呼吸时产生的胸壁位移幅度则在4~12 mm左右。
图3 雷达检测人体原理
若假设模块使用10 GHz雷达来检测胸腔运动,通过计算:每1 mm的位移则会引起相对最大25.2 °的信号相位偏移。故而说,在雷达频率足够高时,即使是很小幅度的胸腔振幅,基带信号的相位偏移量也能够被设备分辨出来[1]。
但是若工作频率过高,则杂波干扰也会相应增大。通常情况下生物雷达会选取2.4~60 GHz的频率。
所以调频连续波雷达在不影响感应效果的情况下,降低波的频率至符合相关法律规定的范围,同时又可以降低频率和模块体积。图4为毫米波、多普勒微波、红外技术对比。基于此原理的60 GHz的FMCW毫米波雷达 ,是人体感应开关传感器的较优选择。

图4 毫米波、多普勒微波、红外技术对比
2 方案验证
为了验证上述方案在实际测试和使用环境中的表现,设置了以下几个模拟场景的验证测试。通过将FMCW毫米波雷达与传统红外的方案测试结果相对比,验证是否符合理论预期。
2.1 静止测试
在一无强磁场、辐射或热源干扰、空旷的25 ℃室温实验场景下,将FMCW毫米波雷达模块和红外人体感应模块置于同一位置,多次分别在不同距离位置设置一静止不动的测试人员。上电后检查反馈信号:是否能检测到人体存在;是否可以持续检测到人体存在。
从表1测试结果来看基本符合理论预期,红外模块难以感应静止的人体目标,而在FMCW毫米波雷达的监测范围内则可以持续感应有无静止人体。
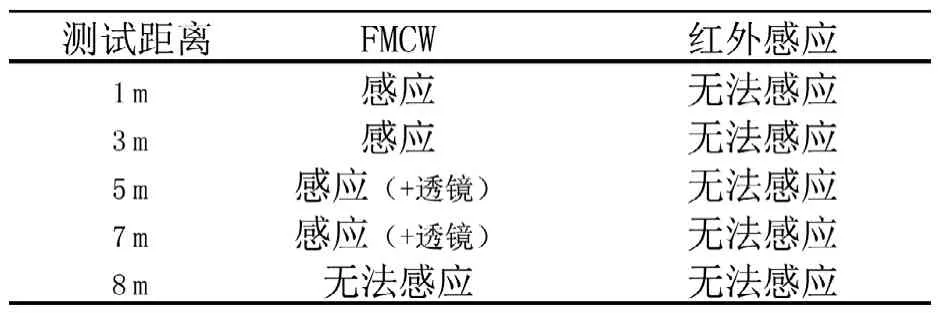
表1 人体静止检测
2.2 穿透测试
在一无强磁场、辐射或热源干扰、空旷的25 ℃室温实验场景下,将FMCW毫米波雷达模块(无外置透镜天线)和红外人体感应模块置于同一位置,多次分别使用木板、玻璃和墙壁将测试人员与测试模块隔离。上电后检查反馈信号:是否能检测到人体存在,以此测试传感器识别运动人体的穿透性能。
从表2测试结果来看, FMCW毫米波雷达的信号可以穿透一般的木板和玻璃,但无法穿透墙壁。而红外感应模块均无法穿透。

表2 墙壁穿透测试结果
2.3 温度测试
在一无强磁场、辐射干扰的空旷实验场景下,将FMCW毫米波雷达模块(无外置透镜天线)和红外人体感应模块置于同一位置。在25 ℃、35 ℃和40 ℃的环境温度下测试两种模块的工作状态是否受到干扰。
从表3测试结果来看基本符合理论预期, FMCW毫米波雷达的工作不受温度影响。而红外人体感应原理是检测温差,故受温度影响很大。

表3 温度干扰测试结果
2.4 距离测试
在一无强磁场、辐射或热源干扰、空旷的25 ℃室温实验场景下,将FMCW毫米波雷达模块(无外置透镜天线)和红外人体感应模块置于同一位置,多次分别在不同距离位置设置运动的测试人员。上电后检查反馈信号:是否能检测到人体存在,以此测试传感器识别运动人体的极限距离。
理论上来讲,雷达在不同的功率和尺寸下的有效检测范围有很大差别,本次的感应距离-实验结果仅代表在本次实验中使用的两组功率较低,透镜尺寸相仿的感应模块。
从表4的测试结果来看,试验所使用的红外与FMCW毫米波雷达无外置透镜天线的状态下,FMCW毫米波雷达的动态人体监测距离范围略小。在配置外置透镜天线后的FMCW毫米波雷达的感应距离会超过红外感应距离,但相应的横向感应的角度会随之降低,在产品化过程中应参考具体应用场景选择是否加装外置透镜天线。
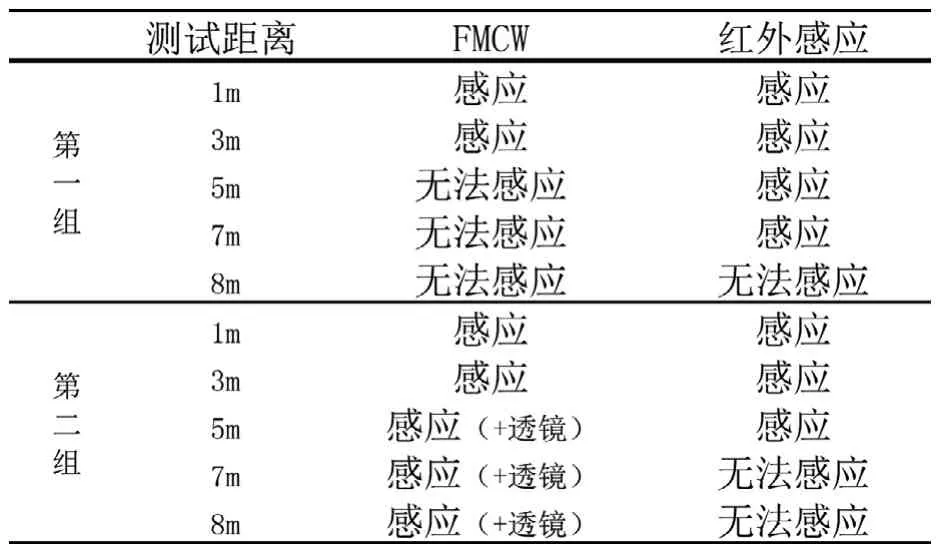
表4 检测范围测试结果
3 设计方案
伍衍亮、赵宇和龚梁提出一种方案——基于60 GHz毫米波雷达的人体感应检测系统。该系统可以较为精确地检测在室内活动人员的相对距离、相对角度、运动速度、运动加速度等信息。
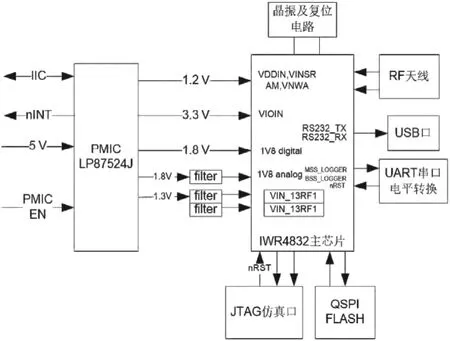
图5 系统结构
整个系统主要分为:芯片模块、天线模块、电源模块及外围电路部分。主芯片模块使用TI公司的IWR6843芯片,其内部集成了DSP系统(DSS)、雷达波系统(BSS)和主子系统(MSS)。BSS主要负责射频信号处理,DSS主要负责信号处理,MSS主要负责跟踪、分类等算法和上层应用的实现。天线模块负责发射和接收雷达信号,同时也会将波形进行对比计算以实现对目标物距离、角度或运动速度的检测。电源模块为整个系统的各模块提供不同的稳定电压。外围电路包括但不限于晶振及复位电路、QSPI FLASH、JTAG仿真口、USB口、UART串口等。
该方案通过分类、滤波、追踪等算法,来检测室内人体运动状态信息。可有效地区分人和非人(包含运动状态家具如风扇等),以及判断人体的环境位置。经过实验验证(结果见图6、图7),该系统正常情况下水平检测角度可达到±75 °,垂直检测角度为±40 °,检测最大距离为8 m。系统检测精度≤0.1 m,角度输出精度≤1 °。功能测试中,在部分实验场景的综合检测准确率≥90 %,与以往的人体检测方案相比:抗干扰能力更强(不受烟雾、温度和光线等影响)、检测范围更广、检测精度更高。该方案在智能家居和人体感应开关领域,具有一定的研究和参考价值[2]。
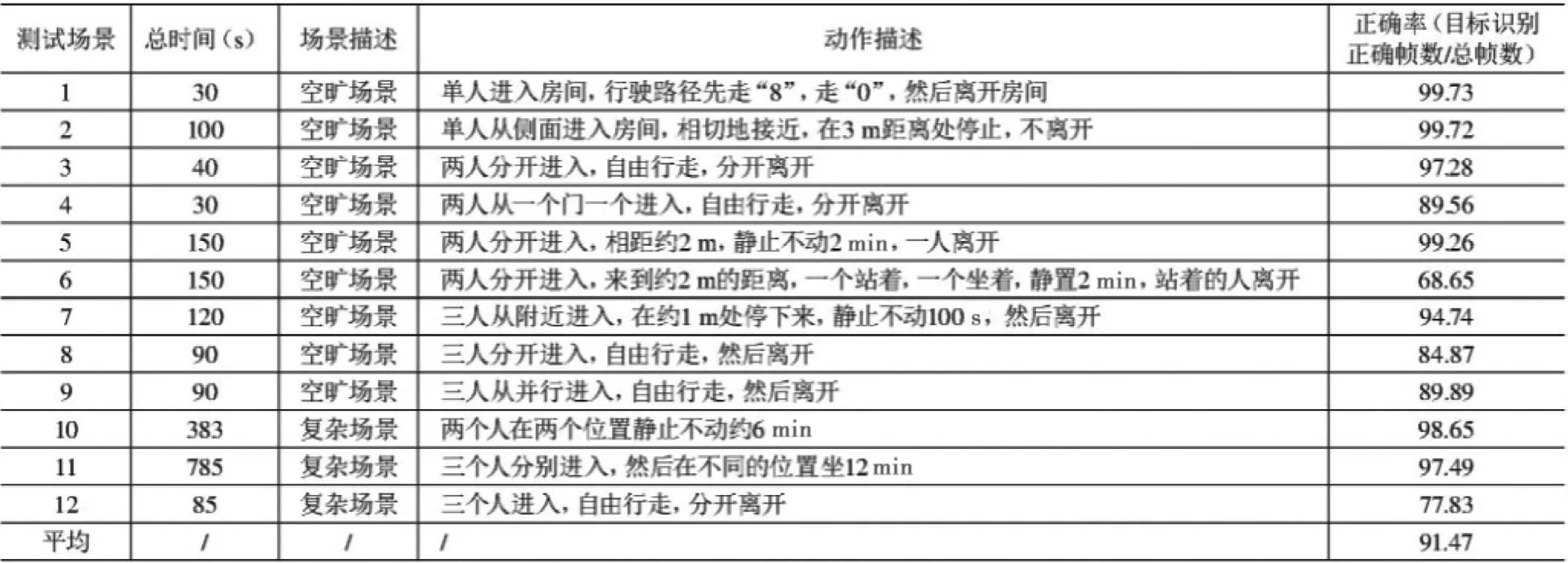
图6 准确率测试
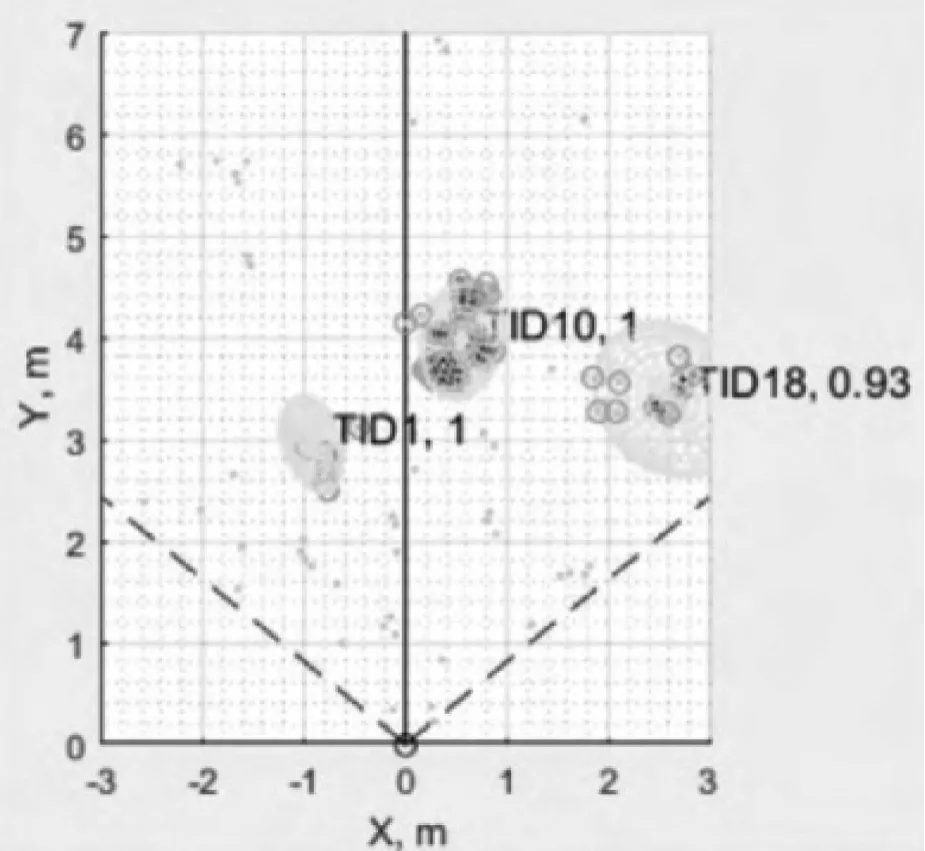
图7 检测结果
4 结语
本文浅析了几种主流的雷达传感器方案在人体感应开关场景中的优劣。通过实际测试,对传统红外感应模块和现阶段高频雷达技术在人体感应开关中的应用场景进行复现和比较,对理论预期进行了数据验证,并给出了一种调频连续毫米波雷达的设计方案。
在未来可以尝试结合不同发射信号种类,如:脉冲雷达和连续波雷达相结合的方案,以此在不降低检测分辨率的情况下,实现进一步降低雷达频率,缩减功耗和模块体积。对于相关产品的应用化工作有一定的借鉴和指导意义。