基于多模块换装的农用履带动力平台设计
2021-12-15孙超然肖名涛
陈 斌,刘 奇,邹 鑫,孙超然,肖名涛
基于多模块换装的农用履带动力平台设计
陈斌,刘奇,邹鑫,孙超然,肖名涛
(湖南农业大学机电工程学院,湖南 长沙 410128)
易于在履带动力平台上上拆卸或组装的多模块农机具是针对农业机械季节性强,年有效作业时间短,不同类型的作业机械时间重合度低等特性而研发的。在设计这型易于在履带动力平台上上拆卸或组装的多模块农机具过程中,设计团队论证了通过中间车架实现多模块快速换装的便捷性、探索了基于单动力快速接入与高效传递的可行性、阐明了基于辅助机构实现模块互换的可能性,最后通过虚拟样机技术,论述了不同模块间的互联过程。该型动力平台通过多模块互换技术,在单一履带动力平台的基础上,可形成履带式旋耕机、履带式收割机和履带式运输车等多种产品,实现大宗农业机械装备在基于动力平台上的条件下一机多用,对减少农业机械的闲置浪费,提高农用资源的利用率意义重大。
多模块;履带;动力平台;互换
由于农业生产过程的复杂性,一种农业机械很难完成耕整地、种植、田间管理、收获、运输等多个作业环节,这就导致了即使是单一农作物的全程机械化生产,也需要使用到各种不同的机械。以南方水田主要种植的水稻作物为例,在水稻大田全程机械化生产方面,主要有水田机械化耕整地、机插秧或机直播、机械化田间管理、机械化收获和运输五个环节。这五个环节分别需要使用到五种不同的机械,即拖拉机、插秧机或直播机、植保机、收割机和运输车,这五种机械的功能和结构差异巨大,但是从它们的动力平台来说,又具有很多相似的特征[1~2]。南方水田常用的拖拉机、收割机和运输车的底盘通常为履带式动力底盘,插秧机或直播机、直播机为水田轻型底盘[3~5]。插秧机或直播机、植保机的底盘基本上可以通用;耕整地、收获和运输环节复杂,其动力底盘的通用性很差,主要表现在在耕整地环节使用的旋耕机、铧式犁常采用履带拖拉机驱动或履带式旋耕机直接驱动,收割机和运输车采用专用的履带底盘驱动[6]。
由于单台农机设备的功能单一,一年之中实际作业时间极短,大部分时间处于闲置状态,导致购机资金占用大、维修保养成本高。特别对于南方丘陵地区,由于其地形高低起伏,田块分散,单个农业机械所服务的农田面积相较于北方更小,每年的实际作业时间更短,闲置时间更长[7]。这种情况不但造成了生产资料的严重浪费,对农业机具的保养维护也提出了挑战。很多农业机械由于作业后的养护不及时、不完善,造成第二年的功耗增加,作业性能下降,甚至作业中途突然出现停机等现象,直接影响农业生产效率,打击了农民对农业生产的积极性。为了改变履带式农机装备在实际使用过程中存在的此类问题,本课题组设计并论证了一种基于多模块换装的农用履带动力平台。
1 模块化设计方法
在农业机械动力平台中,拖拉机通过三点悬挂可挂载不同的工作机具,实现了一机多用,是一种很好的模块化平台。但是,通过三点悬挂互换的拖拉机模块,一般功能单一、整备质量小,对复杂的工作机具换装适应性差,尤其是不适合收割机模块的换装,因此若要将收割机模块化,就需要寻求更优化的换装形式。
1.1 总体介绍与实现
通过把履带式旋耕机、履带式收割机和履带式运输车分别分解为履带式旋耕机=履带式动力底盘模块+旋耕机模块;履带式收割机=履带式动力底盘模块+收割机模块;履带式运输车=履带式动力底盘模块+车厢模块。通过专用的模块化设计,将履带式旋耕机、履带式收割机和履带式运输车优化为:履带式动力底盘模块+旋耕机模块、收割机模块、车厢模块的形式。一个通用履带式动力底盘模块可以与多个工作机构模块换装,从而实现一机多用。
1.2 履带通用动力平台设计
履带通用动力平台主要由驾驶室、发动机、动力输出轴、车架、履带行驶装置和传动系统组成,如图1所示。其中驾驶室主要包含动力平台的操作机构如油门、刹车、制动踏板,变速杆等。发动机的动力一部分通过皮带传动至传动系统驱动履带行驶装置运动,另一部分通过皮带传递至各个工作模块,用于驱动工作装置运动。驾驶室、发动机、履带行驶装置和传动系统都装配在车架上,车架上通过专用机构连接不同的模块。

1 驾驶室;2 发动机;3 发动机动力输出轴;4 车架;5 履带行驶装置;6 传动系统。
1.3 换装模块设计
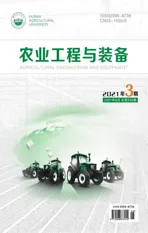
换装模块主要有旋耕机模块、收割机模块和车厢模块,如图2所示。这些模块相对于现有机具的主要差别有以下2个。①操作机构差别:这些模块的操作机构都集成在模块上,模块组装后,操作机构位于通用动力平台的操作机构附近。②动力传动差别:这些模块的动力通过带传动将动力输入后,在分别控制模块、液压系统及其他装置运动。
因此,换装模块具有在单一动力输入下独立工作的特征,如图2a的收割机模块所示,动力输入致收割机模块后,一方面通过机械装置驱动割台的切割刀、螺旋滚筒、拨禾轮及传送带、脱粒清选装置工作;另一方面通过驱动液压机构,使其还可以操作割台升降机构和拨禾轮升降机构等。
1 割台;2 传送带;3 收割机操作台;4 收割机动力输入轴;5 卸粮装置;6 脱粒清选装置;7 割台升降机构;8 拨禾轮升降机构;9 旋耕机操作台;10 液压升降机构;11 旋耕机动力输入装置;12 旋耕机;13 车厢操作台;14 车厢。
2 换装过程设计与实现原理
多模块农用履带动力平台和现有农用动力平台的主要区别为换装的过程。现有动力平台通过三点悬挂来实现不同模块的挂接,而多模块农用履带动力平台采用不同模块的装载换装。多模块农用履带动力平台能通过装载不同模块实现一机多用。
2.1 基于中间车架的换装装置设计
以旋耕机模块为例,为了便于换装,课题组设计了基于中间车架的换装装置,如图3所示。中间车架安装在旋耕机模块上,设置有用于换装的换装辅助架支座和横向、纵向锁止槽。中间车架连同其模块一起可安装在动力平台上,横纵向锁止槽与底盘车架上的横纵向锁止槽能配合形成一套横纵向锁止机构,在锁止器的作用下,实现全向锁止。

1 旋耕机模块;2 中间车架;3 换装辅助架;4 底盘车架;5 动力平台;6 锁止器;7 横向锁止槽;8 纵向锁止槽。
2.2 基于单动力输入的传动系统设计
为了承载不同的模块,动力平台就需要设计为通用平台。不同的模块的功能差异很大,为了实现便捷的换装,就需要将动力传动装置的结合机构设计的尽量简单。如图4所示,以旋耕机模块为例,其动力输入的结构与原理为:发动机动力输出轴通过皮带传递至传动箱上的离合器主动轮,离合器主动轮的一端继续通过皮带传递至液压系统的液压泵,其另一端通过离合器从动轮输出而驱动旋耕机。因此,旋耕机模块的液压系统的动力不受传动箱中的离合器控制,液压升降机构的操控不受旋耕机是否转动的影响。如果传动箱上设置有档位调节机构,还可以设置旋耕机模块档位操作手柄。

1 离合器操作手柄;2 液压升降调节手柄;3 液压泵;4 液压升降缸;5 动力输入装置;6 传动箱;7 旋耕机;8 中间车架;9 液压元件。
2.3 基于辅助机构的换装过程实现
为了实现不同模块换装,最便捷的方式是采用起重机械吊装更换模块,但是采用起重机械换装成本高,时效性差。针对多模块换装困难的问题,课题组设计了便携式换装辅助装置,如图5所示。其换装过程为:多组换装辅助装置安装于中间车架的安装座上,先通过举升中间车架,使中间车架与底盘车架上的横纵向锁止槽分开,然后推开需要换装的模块,即可实现模块的拆卸,其组装过程与之刚好顺序相反。

1 收割机模块;2 换装辅助装置;3 升降机构;4 平移机构。
换装辅助装置应至少具有在Z轴上上升和下降和在X、Y轴上移动的功能,即可以实现升降和平移。通过升降功能可以实现换装模块与通用平台的分离和结合;通过平移功能可以实现换装模块在水平面上移动。为了防止在平移的过程中换装辅助装置倾翻,换装辅助装置必须与中间车架可靠连接。换装后的履带式运输车、履带式收割机和履带式旋耕机如图6所示。

1 通用动力平台;2 履带式运输车;3 中间车架;4 履带式收割机;5 履带式旋耕机。
3 虚拟样机试验
为了验证前文的结构设计是否正确,方案是否可行,课题组运用SolidWorks三维设计软件,设计三维样机,并进行结构安装与运动状况校验。
3.1 SolidWorks虚拟样机设计
采用SolidWorks软件,设计了通用动力平台、运输车模块、旋耕机模块和收割机模块的三维图形,通过三维建模设计,检验不同模块安装后是否与通用动力平台产生接触干涉,操作机构是否布置合理等,其最终效果图如图7所示。

图7 虚拟样机效果图
3.2 Solidworks虚拟样机模块化互换设计
采用SolidWorks软件,定义了不同模块在通用动力平台上的换装过程,验证了通过换装辅助装置实现换装的可能性,换装(履带收割机装配)的步骤与实现过程如图8所示。

图8 基于SolidWorks的虚拟样机模块互换过程验证
4 结语
采用合理的设计方案和换装方案可以实现履带旋耕机、履带收割机和履带运输车的履带动力平台换装,使履带动力平台具有换装大宗农业机械装备的能力。通过简易的换装辅助装备实现履带动力平台间多模块的换装,有利于提高履带动力平台的一机多用性能,减少履带农机装备的闲置浪费,利国利民。
[1] 罗锡文,王在满,曾山,等.水稻机械化直播技术研究进展[J].华南农业大学学报,2019,40(5):1-13.
[2] 白学峰,鲁植雄,常江雪,等.中国农业机械化现状与发展模式研究[J].农机化研究,2017,39(10):256-262.
[3] 谢斌,武仲斌,毛恩荣.农业拖拉机关键技术发展现状与展望[J].农业机械学报,2018,49(8):1-17.
[4] 白学峰,杨浩勇,常江雪.履带拖拉机发展现状分析与发展建议思考[J].拖拉机与农用运输车,2017,44(6):1-4,6.
[5] 史金钟.轮式拖拉机与履带拖拉机差异浅议[J].拖拉机与农用运输车,2018,45(1):1-5.
[6] 李建启.国内拖拉机关键技术发展现状[J].拖拉机与农用运输车,2018,45(2):1-4,7.
[7] 王志超,史金钟,杨柯.可转换轮履带拖拉机现状及发展[J].拖拉机与农用运输车,2017,44(2):4-11.
Design of agricultural track power platform based on multi-module disassembly and assembly
CHEN Bin, LIU Qi, ZOU Xin, SUN Chaoran, XIAO Mingtao
(College of Mechanical and Electrical Engineering, Hunan Agricultural University, Changsha, Hunan 410128, China)
The multi-module agricultural machinery and tools which can be easily disassembled or assembled on the tracked power platform are developed for the characteristics of strong seasonality of agricultural machinery, short annual effective operation time and low time coincidence of different types of operating machinery. This paper studies the multi-module agricultural machinery which can be easily disassembled or assembled on the tracked power platform, demonstrates the convenience of the quick change of multi-module through the intermediate frame, and explores the feasibility of the fast access and efficient transfer based on single power, the possibility of module interchange based on the auxiliary mechanism is expounded. Finally, the interconnection process of different modules is discussed by virtual prototype technology. Based on a single crawler power platform, a variety of products such as crawler rototillers, crawler harvester and crawler transporters can be formed through multi-module interchange technology, it is of great significance to reduce the idle waste of agricultural machinery and improve the utilization ratio of agricultural resources to realize the multi-use of large-scale agricultural machinery equipment under the condition of power platform.
multi-module; crawler; power platform; interchangeable
S223.9
A
2096–8736(2021)03–0001–04
长沙市科技计划(KH1907038),湖南省自然科学基金青年基金项目(2020JJ5239)。
陈斌(1996—),男,湖南衡阳人,博士研究生,主要研究方向为机械创新设计及理论。
肖名涛(1981—),男,湖南桑植人,副教授,博士,主要研究方向为机械创新设计及理论。
责任编辑:张亦弛
英文编辑:吴志立