履带张紧力及其在履带环上的分布
2016-11-24黄雪涛顾亮朱兴高吕唯唯王海霞
黄雪涛,顾亮,朱兴高,吕唯唯,王海霞
(1.北京理工大学 机械与车辆学院,北京 100081;2.山东交通学院 汽车工程学院,山东,济南 250023)
履带张紧力及其在履带环上的分布
黄雪涛1,2,顾亮1,朱兴高1,吕唯唯1,王海霞2
(1.北京理工大学 机械与车辆学院,北京 100081;2.山东交通学院 汽车工程学院,山东,济南 250023)
针对履带环上复杂的履带张紧力问题,研究了张紧力在履带环上的分布情况,并分别以诱导轮、上支履带、主动轮及负重轮为隔离体,分析履带张紧力与外部载荷的关系.在此基础上,建立了履带环张紧力分布的理论估算模型.利用多体动力学模型,对不同路面障碍下的履带张紧力进行了理论估算和动力学仿真,通过对理论估算与仿真结果的对比分析,检验了履带环张紧力估算模型的合理性.
履带张紧力;履带环;理论模型;动力学仿真
履带车辆在行驶过程中,履带与地面及履带与负重轮、托带轮、主动轮、诱导轮之间的复杂耦合作用关系对车辆的操纵稳定性和零部件的使用寿命产生重要影响.研究履带环上张紧力的分布规律,不仅能为履带张紧力研究提供理论依据,而且能为履带车辆的设计开发提供参考.但是,履带张紧力随车辆的行驶工况发生变化,且影响因素多,理论建模及分析难度大,因此一直是履带车辆领域研究的一个难点.
美国密歇根州立大学[1]建立了地面-履带-负重轮系耦合系统数学模型;Sandu等[2]研究了弹性橡胶履带连续算法;Huh等[3-5]设计了测量履带张紧力的方法;Yeu等[6]研究了履带张紧力的控制方法;Galvin等[7]建立了车辆-履带-地面边界元模型;Chalupa等[8]研究了履带张紧力数学建模技术;前人的研究工作主要集中在履带地面的耦合作用及履带张紧力的动态特性研究上,本文作者构建了履带张紧力的理论估算模型,分析了张紧力在履带环上的分布规律,具有重要的理论和实践指导意义.
1 履带张紧力在履带环上的分布
履带车辆行驶时,履带环上各段履带受到的张紧力有明显差别.与地面接触、长度为l12+l23+l34+l45+l56的履带为履带着地段;逆行驶方向,从主动轮到着地段传递牵引力的为履带紧边,长度记为lw;顺行驶方向、从主动轮到着地段之间没有牵引力的为履带松边,长度记为lfr,主动轮后置的履带环分布如图1所示.
2 诱导轮附近履带张紧力的估算
诱导轮、诱导轮曲臂及履带张紧装置几何结构如图2所示.其中,p1是诱导轮曲臂的回转中心;诱导轮与诱导轮曲臂通过p2铰接在一起,而pt为履带张紧装置回转中心.取诱导轮为隔离体,得到诱导轮受力如图3所示.
图3中:Fi1、Fi2为诱导轮附近的履带张紧力;mi为诱导轮质量;ri为诱导轮半径;ρ为单位长度履带质量;Fp为驱动力产生的履带张紧力;Fi为曲臂作用于诱导轮上的作用力;Ftn为履带板绕诱导轮转动时产生的离心力;Msq为驱动力矩;rs为主动轮半径;ωi为诱导轮转动角速度.则诱导轮动力学方程可以表示为
(1)
(2)
(3)
(4)
取诱导轮曲臂为隔离体,得到诱导轮曲臂的几何及受力如图4所示.
其中,Fr为预张紧力.诱导轮曲臂满足动力学方程
(5)
诱导轮附近履带张紧力与预张紧力、行驶速度、驱动力矩、履带松边和紧边长度等因素有关.则
(8)
3 上支履带段及主动轮附近的履带张紧力估算
取上支段履带为隔离体,得到上支履带的受力如图5所示.
其中,Fuq1、Fuq2为上支履带两端的履带张紧力;假设履带张紧力较大,上支履带的重力、支撑力、摩擦力相对较小(小于5%),故略去不计,θ1、θ3的值较小且认为二者相等.则上支履带段的力平衡方程可以表示为
(9)
取主动轮为隔离体,得到主动轮受力如图6所示.其中,Fsq1、Fsq2表示主动轮两端的履带张紧力.则主动轮及其附近的履带满足动力学方程为
(10)
4 负重轮附近的履带张紧力估算
每个负重轮装配体由一个负重轮和一个平衡肘组成.取平衡肘为隔离体,得到平衡肘的受力如图7所示.其中,Mrj表示作用于平衡肘的转矩,j=1~6;Frjx、Frjy表示平衡肘作用于负重轮的作用力.由图7可得出第j个平衡肘的动力学平衡方程
(11)
取第1负重轮为隔离体,得到负重轮受力如图8所示.其中,Frj11、Frj12为第1负重轮的履带张紧力;N1为地面对履带支持力;Ffr1为履带、负重轮之间摩擦力;mr1为负重轮质量;r1为负重轮半径;ωr1为负重轮滚动角速度.
则第1负重轮满足动力学方程
(12)
(13)
(14)
第1负重轮附近履带张紧力满足方程
(15)
同样的,取第2~5和第6负重轮为隔离体,则其轮满足的动力学方程为
(16)
(17)
5 履带张紧力在履带环上的分布及理论估算
由于履带自身重力相对于履带张紧力而言较小,在估算过程中略去不计,故
(18)
履带张紧力与履带板处于履带环中的位置有关.以履带松边与紧边的临界点为起点,顺时针方向为正方向,建立履带张紧力与履带板位置关系的估算公式(19).
(19)
6 履带张紧力的仿真分析及结果
履带张紧力理论估算公式是在线性化履带假设下得到的,为了检验理论估算公式的适用性,根据履带车辆的具体结构参数,利用Adams软件的ATV模块建立履带车辆的仿真模型.相对理论模型而言,履带车辆的仿真模型考虑了履带的板块结构、履带与主动轮的啮合等因素,更加接近履带张紧力的实际情况.下面就以建立的履带车辆仿真模型为例,采用理论估算和动力学仿真对比分析的方法来研究不同路障形状下的履带环张紧力,以此来检验理论估算公式的有效性.
为了研究不同路面障碍下的履带张紧力,假设履带车辆的行驶速度和预张紧力不变,研究履带张紧力理论估算与仿真结果的差异,分析条件如表1所示.
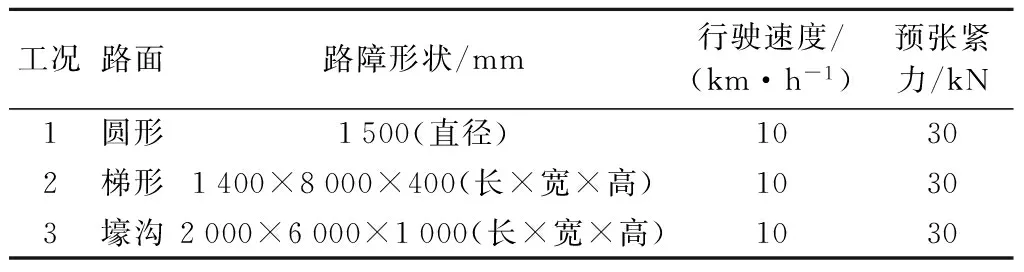
表1 履带张紧力随路障变化的分析条件
履带车辆在不同地面行驶时履带张紧力的理论与仿真结果对比如图9所示.由图9可知,履带张紧力理论估算与仿真结果在变化趋势上趋于一致,在数值上的误差在30%范围内,这表明理论估算公式能够反映履带张紧力变化情况,验证了理论估算公式的合理性.
7 结束语
分析了履带环上张紧力的分布情况,得出了履带环各部分的履带张紧力计算公式,建立了履带张紧力理论估算公式,并用仿真分析的方法检验了理论估算公式的适用性.
[1] Ma Zhengdong,Perkins N C.A track-wheel-terrain interaction model for dynamic simulation of tracked vehicles[J].Vehicle System Dynamics,2002,37:401-421.
[2] Sandu C,Freeman J S.Connectivity algorithm for an extended rubber-band track model[J].Heavy Vehicle Systems-International Journal of Vehicle Design,2002,9:333-353.
[3] Huh K,Cho B H,Choi J H.Development of a track tension monitoring system in tracked vehicles on flat ground[J].Proceedings of the Institution of Mechanical Engineers Part D: Journal of Automobile Engineering,2001,215:567-578.
[4] 吕唯唯,顾亮,杨聪彬,等.基于车辆地面力学沙漠沙结构性本构模型的建立[J].北京理工大学学报:自然科学版,2013,33(4):349-352.
Lü Weiwei,Gu Liang,Yang Congbin,et al.Soil structural model for describing constitutive relationship of desert sand under moving vehicle[J].Transactions of Beijing Institute of Technology, 2013,33(4):349-352.(in Chinese)
[5] Huh K,Hong D G.Track tension estimation in tracked vehicles under various maneuvering tasks[J].Journal of Dynamic Systems Measurement and Control-Transactions of the Asme,2001,123:179-185.
[6] Yeu Tae-Kyeong,Hong Sup,Kim Hyung-Woo,et al.Path tracking control of tracked vehicle on soft cohesive soil[C]∥Proceedings of the 6th 2005 International Society of Offshore and Polar Engineers,Ocean Mining Symposium.Changsha,Hunan: [s.n.], 2005:168-174.
[7] Galvin P,Romero A,Dominguez J.Fully three-dimensional analysis of high-speed traintracksoil-structure dynamic interaction[J].Journal of Sound and Vibration,2010,329:5147-5163.
[8] Chalupa Milan,Severa Libor,Vlach Radek.Vehicle track loading simulation[C]∥Proceedings of the 4th International Conference on Machine Vision: Computer Vision and Image Analysis;Pattern Recognition and Basic Technologies,ICMV 2011.Singapore: [s.n.],2011:83500S-1-83500S-5.
(责任编辑:孙竹凤)
Track Tension and Its Distribution on Track Link
HUANG Xue-tao1,2,GU Liang1,ZHU Xing-gao1,LÜ Wei-wei1,WANG Hai-xia2
(1.School of Mechanical Engineering,Beijing Institute of Technology,Beijing 100081,China; 2.School of Automotive Engineering,Shandong Jiaotong University,Ji’nan, Shandong 250023,China)
Aiming at the complex track tension of track link, the distribution of track tension on track link was studied, and the relation of track tension and outer loads was analyzed depend on the free body diagram of the idler, upper track, sprocket, and road wheels.A theoretical estimation model of track tension was built based on these analyzed results;and the track tension in different road blocks was simulated with a multi-body dynamic model.Comparing the theoretical estimation results with the simulation results, the rationality of the theoretical model was validated for track link tension.
track tension;track link;theoretical model;dynamic simulation
2013-07-01
国家自然科学基金资助项目(1030020220707)
黄雪涛(1978—),男,博士生,E-mail:xuetaohuang@163.com.
顾亮(1958—),男,教授,博士生导师,E-mail:guliang@bit.edu.cn.
TH 122
A
1001-0645(2016)03-0226-05
10.15918/j.tbit1001-0645.2016.03.002