储煤场多点激光扫描盘煤系统研究
2021-12-14靳永亮孙彦亮胡旭喆
靳永亮 孙彦亮 胡旭喆
(河北建投沙河发电有限责任公司,河北 沙河 054100)
目前,在国内应用比较普遍的盘煤方法包括人工测量、激光雷达盘煤测量、无人机盘煤等[1-2]。其中,依靠人工方法解决储煤场盘煤问题时容易产生比较大的误差,而且人工现场测量劳动强度大,工作环境差,人员不能长时间停留,导致耗费时间较长[3-4]。借助无人机技术进行盘煤,受到设备自身的限制会出现难以控制定位精度、无人机抖动拍照模糊等问题,尤其是对于封闭式储煤场的适应性比较差[5-6]。现有的激光雷达盘煤系统实施过程复杂,维护成本高,测量距离短,透视几何定位存在测量死角和盲区[7-8]。针对沙河发电公司储煤场盘煤方法的现状和实际需求,设计了一种多点激光扫描3D 点云模型成像的自动盘煤系统,将多点激光扫描技术应用到数字化煤场的管理系统中,使用3D 图形降维的方法存储原始点云数据,并将多种坐标系下的点云模型进行滤波、降噪、网格化处理,使系统能快速地转换成彩图,提高了整个场地中数据的聚合度。
1 多点激光扫描盘煤系统结构
1.1 储煤场概况
河北建投沙河发电有限公司煤场采用三列贯通式布置,挡墙为排水沟与挡煤墙一体浇筑,煤场四周设置环形消防通道。煤场内斗轮机布置于煤场中间,斗轮机回转半径为30 m,斗轮直径6.1 m。煤场堆高为12 m,煤场四周设置的挡风抑尘墙高度为18.6 m,原设计在煤场四周设置了喷淋抑尘设施,煤场已于2019 年实施煤场气膜防尘封闭改造完毕。储煤场利用以往的盘煤系统进行煤场盘点均存在一定困难,不能完全解决现场问题,主要表现在:煤场储煤后,煤堆四周与挡煤墙接触,无法从外侧扫描煤堆轮廓,内侧只能在堆取料机平台上进行测量;煤场内封闭性较好,不适宜人员在煤场内长时间工作;单一堆取料臂运动范围无法实现煤场全覆盖要求,不能完成盘点任务。
1.2 盘煤系统结构
针对储煤场上述问题,多点激光扫描盘煤系统通过在煤场内堆取料机堆料臂、取料臂和仓内环形四周空间合理安装固定盘煤激光扫描仪,且在扫描仪上端配置旋转云台,利用堆料臂及取料臂分别运动,将其覆盖范围内煤堆进行扫描,在堆料臂、取料臂运动端部不能扫描部分,利用旋转云台扩大扫描仪扫描范围,实现整个储煤场的全覆盖扫描。然后利用计算机后台处理,将扫描结果拼接、成像、建模和数据分析,利用三维建模技术完成存煤三维建模和体积计算从而得到储煤场当前存煤量。
整个盘煤系统中,堆料臂激光扫描仪安装在堆料臂前端落料口位置,堆料臂定位编码器采用齿轮传动方式与堆料臂旋转机构啮合动作获取堆料臂实时角度信息。取料臂激光扫描仪安装在取料机门架平台上,取料臂定位编码器安装在取料门架行程轮上,与行程轮同步运动获得取料臂当前实时旋转角度。顶部三台激光扫描仪通过云台连接平均分布在马道顶端,实现对下方煤堆的实时扫描功能。盘煤系统网络结构如图1。
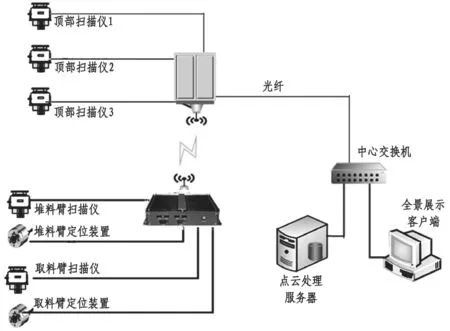
图1 多点激光扫描设备网络结构
2 多点激光扫描盘煤系统工作原理
整套盘煤系统中的激光扫描设备均有独立的运动机构,扫描过程中均以各自为坐标中心进行测量距离的计算,五处激光扫描设备将出现五个独立的点云坐标系统。由于煤场三维建模需要在一个统一的三维坐标系统中建立,因此需要将五个独立的三维坐标进行坐标转换。
2.1 点云坐标转换
在点云坐标转换中,建立一个基准坐标系统,以堆取料机中心作为坐标原点(O)、圆形煤场基准面作为坐标平面建立球形空间坐标系统。将测量得到的每个激光扫描设备相对于该球形空间坐标系中的坐标位置转换到同一个坐标系统中,根据每个激光扫描设备相对于该球形坐标的偏移情况进行(x,y, z)坐标转换,形成点云数据在球形坐标中的空间位置M,转换关系如图2所示。通过点云坐标转换后,所有激光扫描设备扫描出来的图形均在一个公用坐标系统中进行处理,形成完整的点云图形如图3 所示,可以进行煤场的三维建模。
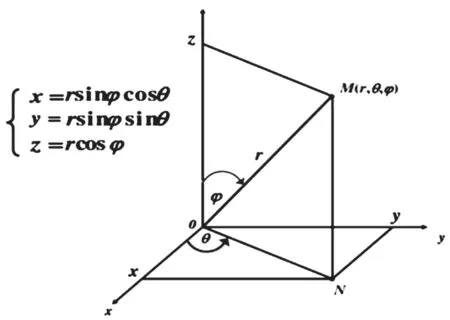
图2 坐标转换后的球形坐标系统
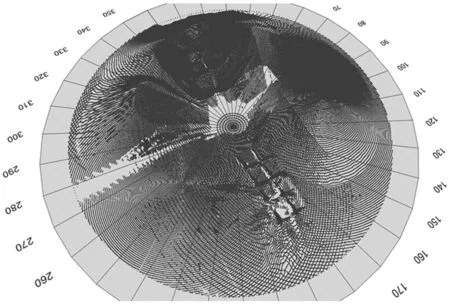
图3 坐标转换后的点云图形
2.2 离散点均值化处理算法
在进行完三维点云拼接转换后,由于设备安装误差及设备扫描过程中的振动问题,在转换后的点云坐标中仍然存在很多噪点需要处理,借助规则格网DEM 数据模型对激光扫描数据结果进行组织,能够完成三维图像的自动纠错、降噪处理,使那些存在明显噪声和错误的数据被自动过滤,形成直观、平滑、完整的模型数据。此外,可以调整规范化网格的DEM 数据的网格间隔,以适应现场所需要的精度和计算效率。通过离散数据的网格规范化处理将平面分布的离散测量点数据网格化,如图4。
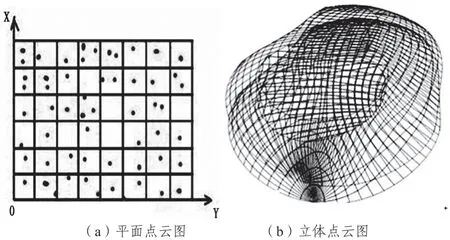
图4 均值化之前的离散点分布
根据系统中给定的平面坐标P(x, y),再以邻近的已知离散测量点作为参考点计算出P 点的高程。因为激光扫描得到的数据密度大,所以在对P 点高程进行计算时引入了加权平均算法。该算法将分布在同一个网格中的点的高度z 进行均值化,且规定网格点的(x, y)坐标为每个网格中心。通过合理制定网格的大小,在不影响精度的条件下尽可能增大网格,提高计算效率,同时能够降低设备抖动对数据的影响。均值化后的离散点分布如图5。
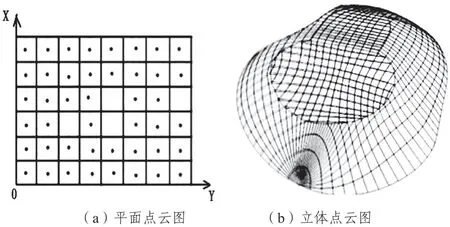
图5 均值化后的离散点分布
完成点云离散化处理后,通过三维建模软件可以建立完整的煤场三维模型,同时模型具有多种模式查看功能。结合三维数字化系统,利用现有点云数据通过3D 化的效果呈现,可以在系统后台实时展示整个储煤场内存煤变化情况及设备运行情况,利用预留接口为后续智慧矿山提供数据基础,实现储煤场实时三维信息展示功能。3D 化效果如图6。
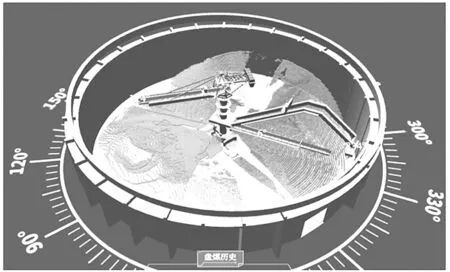
图6 3D 实时展示系统
3 盘煤系统应用效果分析
3.1 盘煤系统主要功能
通过将该盘煤系统在河北建投沙河发电公司储煤场进行工程应用,可以完成自动定时或人为手动操作盘点,相比以往人工盘煤操作简单快捷,实现了在线对储煤场存煤量的快速精准盘煤。经测试,整个盘煤系统可实现如下主要功能:
(1)储煤场存煤数据由激光扫描设备自动采集和处理,并实时反馈后台计算机进行三维建模,形成储煤场存煤的多种图形。整个盘点到建模完成时间小于20 min。
(2)激光扫描过程中能够实现煤场图形的整体实时更新,自动生成煤场三维模型。三维煤场模型具有分层、分堆计算管理功能,可以对任意分区内煤堆体积计算及煤种信息查询。
(3)系统可完成储煤场任意区域内储煤量的盘点功能,盘点结果相对误差小于0.5%,自动生成带煤场立体图形、存煤量、盘煤时间等多功能的报表,方便人员查阅和记录。
(4)能够实现煤场三维料场展示功能,展示画面中显示堆取料机三维形态,实时显示堆料臂、取料臂状态及数据。3D 实时展示系统能够精准获取料场内料堆及堆取料机三维模型,实时展示模型状态。
(5)三维模型能够实现颗粒化管理功能。煤场内煤堆立体分层管理可以精确到每次堆取煤任务时的料堆轮廓变化情况并计算体积。
3.2 经济效益分析
激光扫描盘煤系统的实施可以节省公司人力成本投入。常规煤场盘点过程中需要3 人参与现场盘点工作,盘点时间需要3 h,目前公司相关人员人力成本每小时100 元,本项工作每周进行一次,一年可节省公司人力成本投入46 800 元;而且,还可以将解放出来的人力进行其他工作,间接减少人力成本46 800 元。因此,人力成本每年可节省93 600 元。
综合以上表明,设计的多点激光扫描3D 点云模型成像的自动盘煤系统适合沙河发电公司储煤场,可以高效准确盘点储煤场内存煤情况,对煤场存煤进行实时统计,避免了人为测量造成的盘煤周期长、误差大的问题,有效提高了企业的经营管理水平。
4 结 论
针对沙河发电公司储煤场的盘煤问题,建立了一种多点激光扫描3D 点云模型成像的自动盘煤系统,介绍了其系统结构组成和工作原理。通过将系统在沙河发电公司储煤场进行盘煤工程应用,试验表明系统的盘煤时间为20 min,盘煤误差小于0.5%,而且经济效益明显,实现了储煤场内储煤量信息的实时、高效、准确统计。
