航天器全向重载转运平台的设计
2021-12-13张继民石震宇王文宗
□ 张继民 □ 吴 锡 □ 石震宇 □ 王文宗
1.天津航天机电设备研究所 天津 300458 2.天津市宇航智能装备技术企业重点实验室 天津 300458
1 设计背景
大型航天器在厂房内的转运问题已经成为当下研究的热点。随着我国航天事业现代化进程的不断加快,强大的技术实力和高效的生产力已成为企业的核心竞争力。
航天事业正朝着创新科技化、产业密集化、航天器重型化的方向不断推进。单体质量在10 t以上的航天器现已常见,如何快速高效地转运超重大型航天器,逐渐为业内所重视[1-2]。
传统的重载转运车在狭小工作场地中往往失去移动能力,在通过厂区路口或者小角度拐角时,需要相关人员在现场指挥调控,转运车的速度、精度和运输效率都会受到影响[3]。部分作业现场对转运车还有一些特殊要求,如在现场能够实现全方位转向移动,要求转运平台能够搭载多种其它设备等。对此,需要研制一种承载能力较强的全方位重载转运平台,以柔性化、可拓展化的特点解决以上问题[4-5]。
麦克纳姆轮是一种全方位轮结构,具有运动灵活、控制简便等优势。对于需要在狭小的空间中移动的转运车而言,选用麦克纳姆轮结构具有优势。笔者基于麦克纳姆轮技术,设计了航天器全向重载转运平台。
2 麦克纳姆轮概述
麦克纳姆轮结构如图1所示。在轮缘上斜向分布许多滚轮,这些成角度的滚轮将一部分转向力转化为法向力[6-7]。依靠各自滚轮的方向和速度,这些力最终在任何要求的方向上产生一个合力矢量,从而保证移动平台在最终合力矢量的方向上能自由移动,且不改变自身的方向,由此麦克纳姆轮可以实现横向滑移。滚轮的母线很特殊,当麦克纳姆轮绕着固定的轮毂筒转动时,各个滚轮的包络线为圆柱面,所以滚轮能够连续向前滚动[8-10]。
麦克纳姆轮移动系统一般由四套主动麦克纳姆轮组成,可以实现平面三个自由度,即X轴方向平动、Y轴方向平动、绕中心垂轴转动的全方位移动。
每套主动麦克纳姆轮都由一台伺服电机独立驱动,通过四套主动麦克纳姆轮转速和转向的适当组合,可以完全控制全向移动平台在平面运动的三个自由度。与普通差动轮相比,麦克纳姆轮能产生一个相对于轮体的轴向分力,通过调节各套主动麦克纳姆轮驱动电机的转向和转速,形成一个与地面固定坐标系成一定角度的合力,即可实现整个麦克纳姆轮移动系统的全方位运动。麦克纳姆轮式全向移动平台的四轮组合及运动分析如图2所示。图2中,Fw为滚轮驱动力,Fa为麦克纳姆轮滚动时滚轮受到的轴向摩擦力,Fr为滚轮从动滚动时受到的滚动摩擦力,ω为滚轮转动的角速度,空心箭头为全向移动平台运动方向。

▲图1 麦克纳姆轮结构
3 全向重载转运平台结构
航天器全向重载转运平台由转运平台框架、电动升降机构、麦克纳姆轮移动系统和控制系统等组成,如图3所示。全向重载转运平台额定承载为12 000 kg,采用四套总承载为18 000 kg的主动麦克纳姆轮,具有全向移动功能,可以实现在二维平面内任意方向的移动,包括直行、横行、斜行、任意曲线移动、零回转半径转动等。
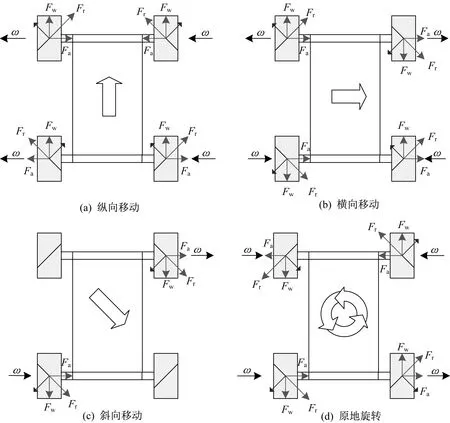
▲图2 麦克纳姆轮式全向移动平台四轮组合与运动分析
4 独立悬挂技术
航天器全向重载转运平台采用单轮独立悬挂系统,确保在任何状态下所有车轮均能着地,保证具备良好的驱动能力,同时保证麦克纳姆轮和地面之间有可靠的正压力。
麦克纳姆轮移动系统主要由麦克纳姆轮、轮边减速器、伺服电机等组成,如图4所示。伺服电机和轮边减速器为麦克纳姆轮移动系统提供动力。笔者选用承载能力强的两端支撑型麦克纳姆轮结构,每套麦克纳姆轮承载大于4 t,轮径为590 mm,车宽为300 mm。滚轮外缘包覆超级聚氨酯材料,具有耐磨性、耐腐蚀性和良好的加工性。
5 多轮系设计
单套麦克纳姆轮的承载能力有限,在航天器全向重载转运平台车身高度受限或麦克纳姆轮尺寸一定时,面对更大航天器的运输,四轮全向重载转运平台将不能满足工作要求。另一方面,在实际运输过程中,部分被运航天器载荷不均匀,质心偏移,会加重四轮全向重载转运平台部分麦克纳姆轮的磨损。一旦发生单个滚轮断轴的意外情况,将会使整个全向重载转运平台瘫痪,严重时可能导致侧翻等运输安全事故发生。
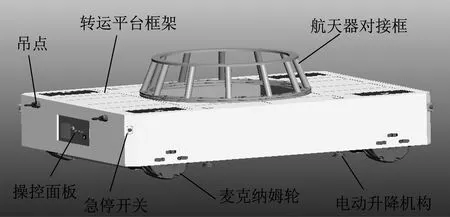
▲图3 全向重载转运平台结构
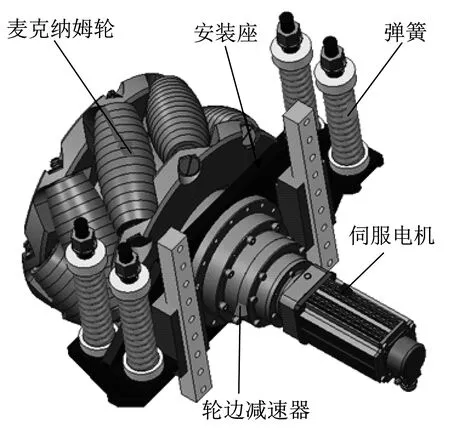
▲图4 麦克纳姆轮移动系统
当四轮全向重载转运平台不能满足重载运输需求时,可以采用添加麦克纳姆轮的方法设计多轮系全向重载转运平台,来拓展平台运载功能。由四轮全向重载转运平台拓展至多轮系的方式有多种,可以增加车身长度和两侧麦克纳姆轮的套数,也可以将两台甚至多台四轮全向重载转运平台刚性连接,进而合并成一个整体。
八轮全向重载转运平台举例如图5所示。图5中的虚线框表示全向重载转运平台的车体,八个实线框表示麦克纳姆轮,实线框中的斜线表示滚轮的轴线方向。麦克纳姆轮按照单双号标记,分别排列在全向重载转运平台的两侧。
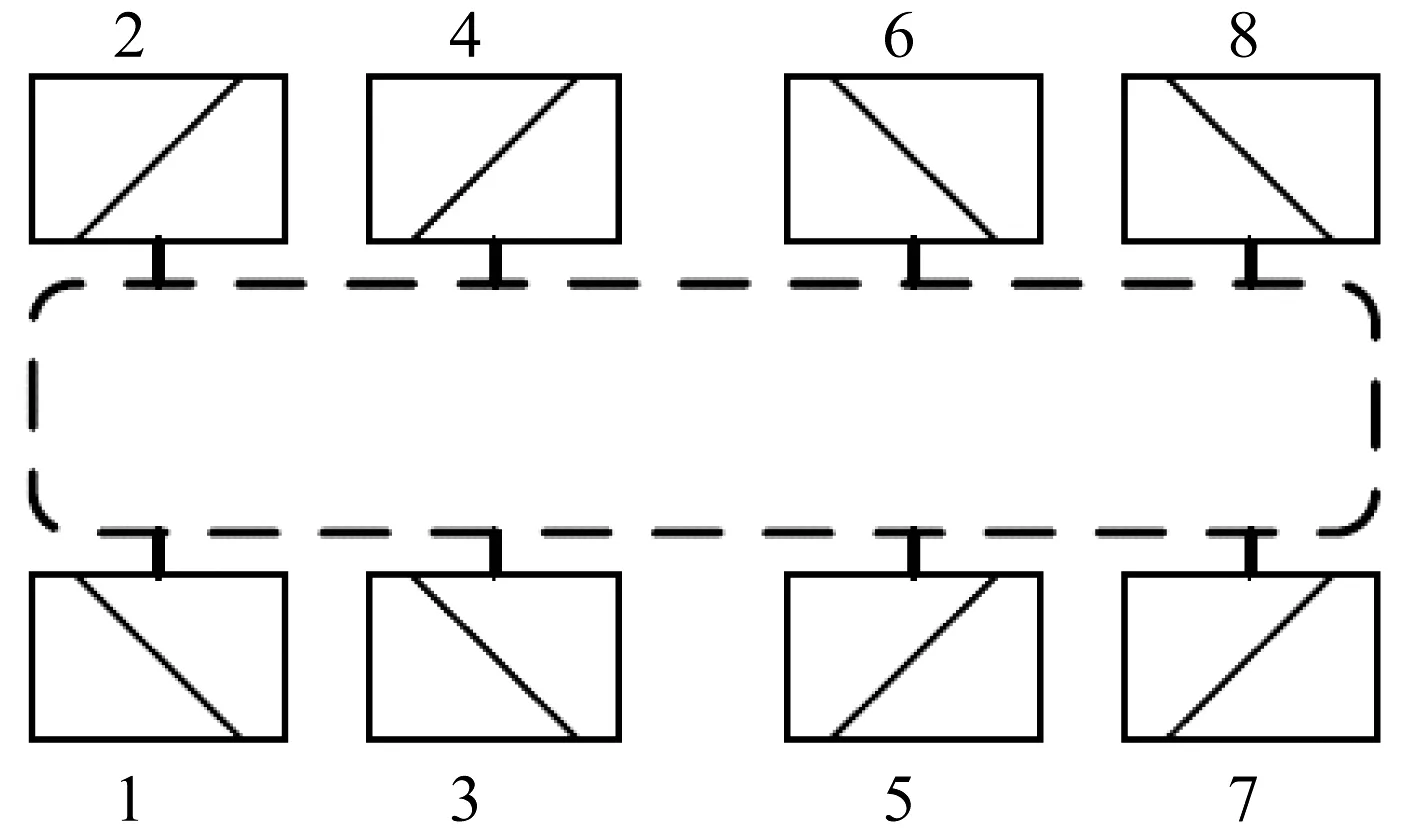
▲图5 八轮全向重载转运平台举例
6 控制系统
航天器全向重载转运平台控制系统基于M241可编程序控制器、控制器局域网总线设计,采用72 V、200 A·h磷酸铁锂电池组为整车供电。
控制系统主要由驱动单元、主控单元、人机交互单元、供配电单元组成,用于实现全向重载转运平台的全向移动、车体电动升降,具有速度控制、定位控制、状态显示、安全保护等功能。控制系统的原理框图如图6所示。
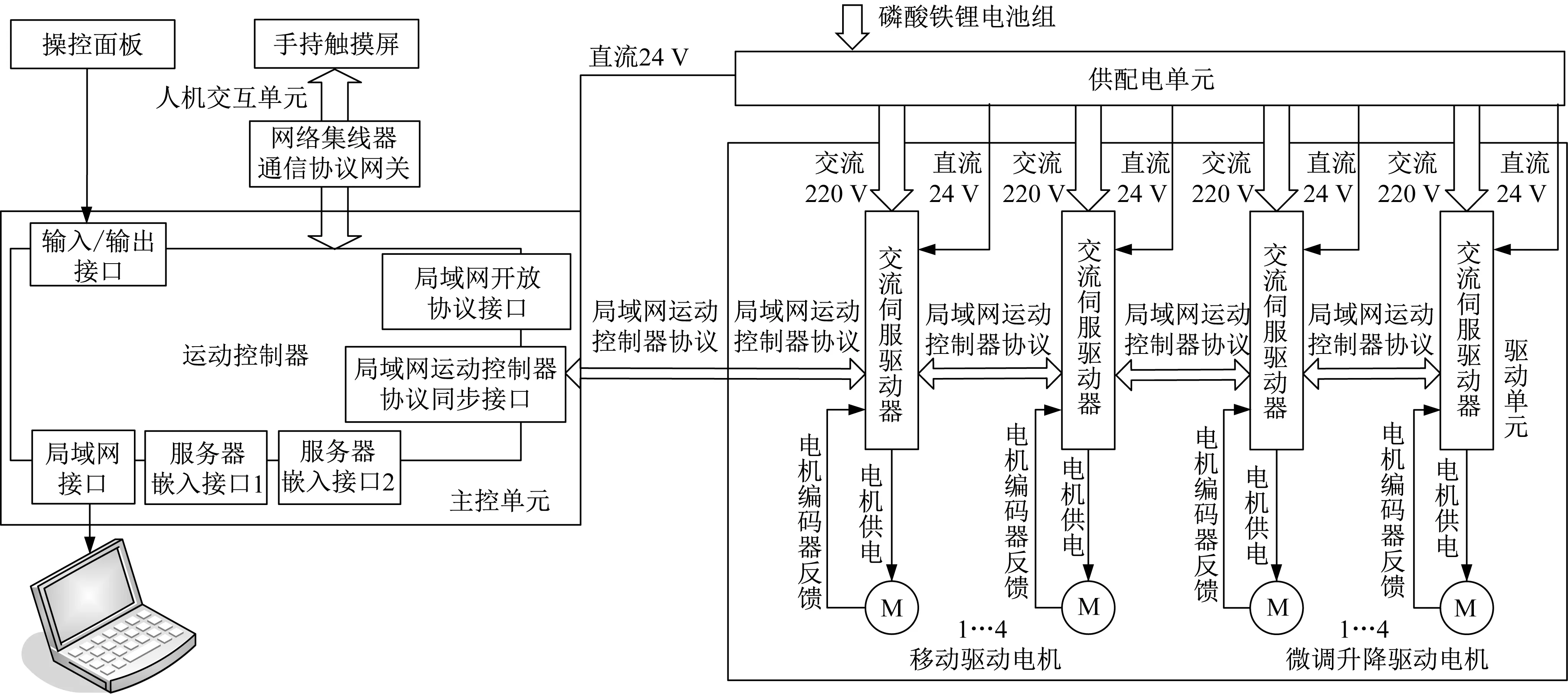
▲图6 全向重载转运平台控制系统原理框图
驱动单元主要由八套直流伺服电机和直流伺服驱动器组成,通过现场总线接口实现行走、电动升降的调速和定位功能。主控单元采用M241可编程序控制器,综合处理全向重载转运平台各功能单元的工作。接收到人机交互单元的操作指令后,主控单元通过现场总线将运动指令发送至各伺服驱动器执行,并将位置数据和驱动单元运行状态发送至人机交互单元进行显示。
人机交互单元主要由手持触摸屏和操控台备份按钮组成,用于将解析后的操作人员控制指令发送至主控单元,并可在手持触摸屏上显示运行状态。
供配电单元主要由72 V、200 A·h磷酸铁锂电池组、电池管理系统、充电机、开关、塑壳断路器、漏电断路器、直流接触器、直流-直流开关电源组成,为全向重载转运平台提供动力电源和直流24 V控制电源。
7 结束语
笔者基于麦克纳姆轮设计了航天器全向重载转运平台,可实现航天器的大范围、狭小空间精准转运。全向重载转运平台结构紧凑,负载性能好,各功能系统以模块形式安装在平台上,通用性和可拓展性较强,拆装维修方便,维护成本较低。全向重载转运平台是一种新兴技术,多年来只在航空、航天领域小范围应用推广,通过本次全向重载转运平台的设计试制,笔者建议可以适当将该技术推广至民用领域。
