基于YOLO v3 的微生物目标检测研究
2021-12-13杨龙飞王海龙刘婉莹张宇轩吴开帅纪晓娜田曦
杨龙飞 王海龙 刘婉莹 张宇轩 吴开帅 纪晓娜,3 田曦,3*
(1、长春工程学院,吉林长春 130012 2、吉林省天恒水务工程有限公司,吉林长春 130000 3、吉林省城市污水处理重点实验室,吉林长春 130012)
活性污泥法污水处理工艺是利用活性污泥中的微生物具有吸附和氧化的能力,分解去除污水中的有机污染物达到净水目的。活性污泥状态良好时才可以使出水水质达标,故而活性污泥状态的检测是保障出水水质达标的第一道关卡。
利用活性污泥中的指示性微生物种类即可得知活性污泥的状态。传统的活性污泥状态检测手段使用电子显微镜观察活性污泥中的微生物种类,最终人工判断活性污泥的状态。目前其具有如下缺点:需要提取泥样,制作玻片样本,操作显微镜,人工分析判断这四个繁琐的步骤;指示微生物从增殖到生物相处于稳定需要时间,若活性污泥状态发生急剧变化不能实现即时检测诊断。针对这一系列问题,使用人工智能目标检测手段可以实现微生物种类的快速识别的方式即可解决。未来可通过识别出的结果对应当下生物处理池内环境,匹配水厂自动化设备,通过调节池内各项环境因素使活性污泥始终保持良好的状态。
1 主流的深度学习目标检测算法
图像目标检测是人工智能的关键领域之一。基于深度学习的目标检测算法也愈加成熟,此类算法具有自己学习的能力,检测速度较快,并且检测精度较高,已经在各种视觉检测场景中被采用。目前主流的基于深度学习的目标检测算法主要分为了如下两个流派类别。
1.1 两阶段目标检测算法
此类算法是将目标检测分为两个阶段,第一阶段使用候选区域生成网络(Region Proposal Network,RPN)生成一个有可能包含待检物体的候选框,第二阶段利用卷积神经网络完成对候选框中候选目标位置与类别的预测及识别[1]。常见的两阶段目标检测算法有R-CNN(Region-Conventional Neural Network)、Fast R-CNN[2]、Faster R-CNN。
1.1.1 R-CNN 目标检测算法
R-CNN 引入卷积神经网络自动学习如何更好地提取特征。但是R-CNN 算法本身存在很多缺陷在提取特征向量时,每个候选区域都会被单独地从原图上裁剪下来,再依次输入神经网络,这样做占用了大量磁盘空间,也带来了很多重复性计算,导致训练速度和推断速度都非常缓慢。
1.1.2 Fast R-CNN 目标检测算法
Fast R-CNN 不再使用支持向量机进行分类, 其直接训练CNN 在两个新的网络分支上分别进行分类和回归。这种结构虽然解决了存储空间的问题,然而在训练时能及识别精度上改进空间较少。
1.1.3 Faster R-CNN 目标检测算法
Ren 等人提出了Faster R-CNN 算法。该算法最大的创新点在于设计了RPN 这样一个候选框生成网络。有了RPN 取代选择性搜索算法,Faster R-CNN 最终在GPU 上的检测速度达到了5FPS。该算法是第一个真正实现了端到端训练的检测算法,标志着两阶段检测器的正式成型,然而两阶段目标检测算法在真正投入使用中检测速度远远大于单阶段目标检测算法,不能满足于我们实时微生物检测的设想。
1.2 单阶段目标检测算法
单阶段目标检测算法不使用RPN,直接在卷积神经网络中提取特征来预测物体分类和位置信息,是一种端到端的目标检测算法[3-4],因此单阶段目标检测算法具有更快的检测速度。常见的单阶段目标检测算法有SSD (Single Shot multibox Detector)、YOLOv1(You Only Look Once)、YOLO V2、YOLO-V3等。
1.2.1 OverFeat 目标检测算法
Sermanent 等人于2013 年提出的OverFeat 是最早的一阶段检测器。虽然它的精度不如同期R-CNN,但其思想很有前瞻性,使得OverFeat 比R-CNN 的检测速度快了9 倍。然而OverFeat 采用了多尺度贪婪的划窗策略,导致计算量很大,没有考虑多尺度特征融合,对小目标效果差,整体的检测效果不尽人意。
1.2.2 YOLOv1 目标检测算法
2015 年,Redmon 提出的YOLOv1 算法则真正地实现了实时性目标检测。YOLOv1 的缺点有定位不够准确,找回率低。并且YOLOV1 预训练的时候会导致分类切换到检测的时候,模型需要适应图像分辨率的改变,该算法还有极大的改进空间。
1.2.3 YOLOv2 目标检测算法
YOLOv2 吸取了很多深度学习的技巧,最终在速度、精度上均得到提高。但是YOLOv2 把多尺度考虑到训练的data 采样上,导致相邻很近的物体还有很小的物体检测的效果不是很好,尤其同一类物体中出现的不常见的长宽比和其他情况时,泛化能力会弱一些,对于如微生物这种小目标的检测能力不足。
1.2.4 YOLOv3 目标检测算法
Redmon 等人再次进行升级,提出了YOLOv3。其实现了最好的速度与精度的权衡,逐渐提升对小目标的检测能力,同时实现了对高覆盖率图像的精准检测,且结构简单、背景误检率低,也是目前工业界目标检测的首选算法之一。在保持速度优势的前提下,提升了预测精度,尤其是加强了对小物体的识别能力,综合其检测能力及检测速度是目前最适合识别微生物的深度学习算法。
2 基于YOLOv3 的目标检测平台特点
2.1 使用Darknet53 主干特征提取网络
YoloV3 所使用的主干特征提取网络为Darknet53,它具有一个重要特点是使用了残差网络,特点是容易优化,能够通过增加相当的深度来提高准确率。残差块的使用了跳跃连接,缓解了在深度神经网络中增加深度带来的梯度消失问题。
2.2 构建FPN 特征金字塔和利用Yolo Head
从特征中提取预测结果,在此过程中可分为两个部分,分别是构建FPN 特征金字塔进行加强特征提取和利用Yolo Head对三个有效特征层进行预测,特征金字塔可以将不同shape 的特征层进行特征融合,有利于提取出更好的特征。
利用Yolo Head 获得预测结果,利用FPN 特征金字塔,我们可以获得三个加强特征,然后我们利用这三个特征层传入Yolo Head 获得预测结果。
图1 为YOLOv3 深度学习思想搭建目标检测平台的思路示意图。
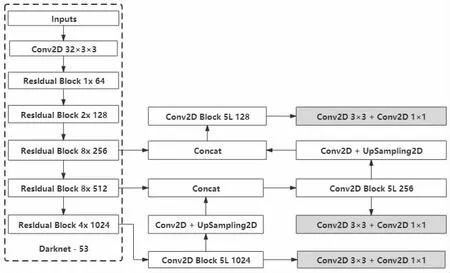
图1
3 基于YOLOv3 的微生物目标检测平台展望
3.1 使用YOLOv3 解决微生物识别的问题
针对在活性污泥中微生物的检测场景中往往会出现受到遮挡,且有些微生物移动速度较快相机难以捕捉等问题。凭借YOLOv3 算法极快的检测速度,以及对微小物体准确的识别能力,可以实现活性污泥中微生物种类的精准快速识别。
以aeroplane ;Bicycle;bird;等传统图像作为识别目标为例,该算法有较强特征提取能力,有着较高的精确度且在识别速度在40ms-60ms,能够满足微生物识别的所需的准确及快速的要求。(图2)

图2
3.2 使用YOLOv3 在微生物识别中的能力表现
使用复杂场景中包含多目标的图片进行测试表明:基于YOLOv3 的微生物目标检测平台,具备复杂环境下对于较小型目标的检测能力。(图3)
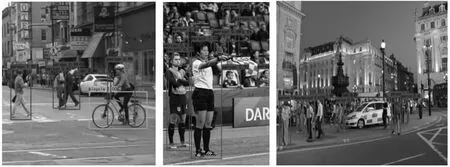
图3
基于YOLOv3 目标检测算法搭建的目标检测平台是适用于微生物种类识别的,还有提高检测能力并改进的方向:
(1)在制作活性污泥中微生物的数据集时,使用高分辨率相机拍摄图片,通过图片预处理手段进行数据集特征增强。要针对某一微生物进行大量的数据集制作。
(2)在训练阶段,选取合适的预训练权重,训练时关注loss和val-loss 值的变化,规避过拟合。
(3)加入如今的针对小尺度目标检测的新思想,如引进基于上下文信息的小目标检测思想,改进锚点分布思想等。
4 结论
目前基于深度学习的目标检测方法已经涉及各行各业,若在传统的污水处理领域加以利用,可实现对于活性污泥中微生物种类的快速识别,未来通过对比微生物种类及当下生物处理池中的各项环境指标,实时判断出活性污泥的状态是否异常。配套污水处理厂的自动化控制系统,调节生物处理池内的环境参数,保证活性污泥的良好状态,如此设想可为污水处理保驾护航的同时大大降低人工劳动成本。
