四旋翼无人飞行器的控制系统设计
2021-12-13黄朝阳胡国军
黄朝阳,胡国军
(绍兴文理学院元培学院,浙江 绍兴 312000)
0 引言
随着电子控制技术的不断成熟,无人机行业的发展也随之快速发展,在无人机航拍,监控,勘测地形等领域起到了至关重要的作用[1],特别是四旋翼无人机,由于其操作简单,使用限制少,携带便捷,成本便宜等特点,深受人们的喜爱。
1 四旋翼飞行器控制系统的控制原理分析
1.1 四旋翼飞行器结构分析
四旋翼无人机主要由四轴飞行器和控制器两部分组成,其中,四轴飞行器机械结构较为简单,其组成是由四个呈相互独立的电机以及十字状架构,并通过控制器的无线遥控,控制四个螺旋桨的转速,实现飞行器的前进,后退和上升,下降等姿态的改变,从而达到遥控控制无人机飞行器飞行的目的[2],典型的四旋翼飞行器的结构图如图1所示。

图1 四旋翼无人机
1.2 四旋翼飞行器的控制器
四旋翼飞行器控制系统的硬件组成部分如图2所示。飞行控制器STM32通过采集加速度计、陀螺仪、气压计、电子罗盘及GPS模块的信息,对电调速进行控制,同时对四个螺旋桨的运转速度作出调节,从而实现四旋翼飞行器飞行姿态的控制,将其达到理想控制目标,如俯仰,滚动,偏航等,确保无人机的稳定飞行[3]。
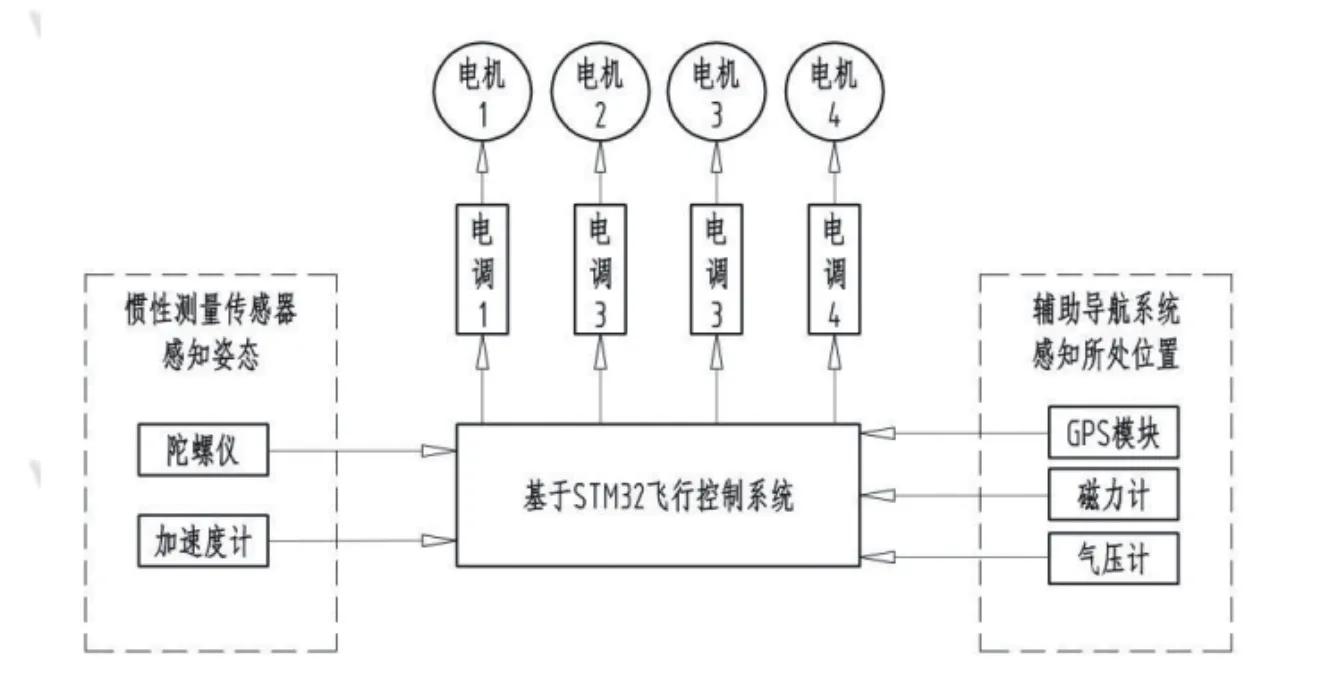
图2 飞行控制硬件结构图
1.3 四旋翼飞行器的垂直飞行与俯仰飞行的控制原理
控制四旋翼飞行器期间,想要保证四旋翼飞行器能够实现多种飞行姿态,需对电机运转的速度作出合理的调节[4]。(1)当四旋翼飞行器处于垂直飞行状态的时候,若1号电机和3号电机逆时针运行,2号电机与4号电机顺时针运行,此时假如两者所形成的合力处于大小一致的状态,那么将会抵消形成的反扭矩;(2)当四旋翼飞行器四个电机同时形成向上的拉力,并且拉力的合力比四旋翼飞行器重力大,将会使得四旋翼飞行器上升,并且实现悬停状态;(3)当四旋翼飞行器的2号电机与4号电机在同向旋转,并且其旋转的速度相同,将1号电机的旋转速度增加,将3号电机的旋转速度降低,便可以实现四旋翼飞行器俯仰操作。
1.4 四旋翼飞行器的横滚飞行、偏航飞行与前后飞行的控制原理
四旋翼飞行器横滚与俯仰飞行时的控制原理具有一致性,在控制四旋翼飞行器横滚或俯仰飞行时,(1)控制1号电机由于3号电机的电机转动速度处于恒定状态,增加2号电机转动速度,将4号电机的转动速度作出改变,此时便可以实现四旋翼飞行器横滚飞行;(2)四旋翼飞行器前后运行时,需控制2号电机与4号电机转动速度恒定,将1号电机的转动速度增加,将3号电机的转动速度降低,此时四旋翼飞行器将会呈现出俯仰运动状态,并且还会向后方向运动;(3)当四旋翼飞行器前后运动的时候,可以增加一组电机的转动速度,降低另一组电机的运转速度,此时四旋翼飞行器能够实现偏航操作[5]。
2 四旋翼飞行器的动力学建模
四旋翼是多旋翼飞行器的一种,相对于其他飞行器而言,它具有体积小、重量轻、灵敏性好、可垂直起降的特点。尽管四旋翼飞行器具有以上优点,然而其动力学模型的强非线性和耦合特性,要求控制器具有强鲁棒性和稳定性。
因此,四旋翼飞行器飞行器动力学模型建立结果的准确性,对控制算法的研究成果和控制精准度提升,均有着十分积极的作用。
2.1 建立四旋翼飞行器数学模型的假设条件
四旋翼飞行器具有较多种运行方式,有俯仰、滚动、偏航、垂直、横向及纵向六种飞行状态,这便要求在六自由度动力学模型构建的时候以基体运行规律为依据[7],不只是要对四旋翼飞行器机体所处的空间位置予以明确,还要对四旋翼飞行器机体的运动状态展开描述。就四旋翼飞行器系统的多变量、非线性、欠驱动等特点而言,在构建动力学模型的时候所面临的难度很高。为了将模型简化处理,现在对四旋翼飞行器建模的飞行条件进行理想化的假设。
(1)假设四旋翼飞行器保持在低空空域飞行,忽略空气阻力的影响;
(2)假设四旋翼飞行器是完全对称的刚体,机体的质心就是飞行器在几何中心;
(3)假设四旋翼飞行器螺旋桨所产生的升力与螺旋桨转速的平方成比,螺旋桨旋转时产生的反扭矩与螺旋桨转速的平方成正比。
2.2 两种坐标系的建立
根据前文的分析可以得知,四旋翼飞行器在六个自由度上的运动方式可以总体上划分成为两个类型:第一类是侧向运动、左右运动以及垂直方向的运动,这种运动方式是沿着轴向展开的平行运动。第二类是旋转运动,四旋翼飞行器绕着某个轴旋转。在分析的过程中,为了更好的将这两种运动方式展开研究,确保数学模型的合理性,在分析过程中将机体坐标系概念和地面坐标系概念引入其中。
(1)地面坐标系即E(OXYZ),通过以地面上某一个固定的原点作为地面坐标系的坐标原点,而X轴,Y轴,Z轴三个轴两两互相垂直,并且规定正方向为Z轴竖直向上的方向,规定的地面坐标系方向与右手定则相符合。
(2)载体坐标系S(OXYZ),载体坐标系的原点是四旋翼飞行器重心,1号螺旋桨和3号螺旋桨所在的横梁便是载体坐标系的Y轴,2号螺旋桨和4号螺旋桨所在的横梁位置便是载体坐标系的X轴,定义X轴正方向为4号螺旋桨指向2号螺旋桨的方向,定义Y轴正方向为3号螺旋桨指向1号螺旋桨的方向,定义Z轴的正方向为垂直向上的方向,因为在构建坐标系之前假设四旋翼飞行器是理想刚体,所以其质量分布较为均匀,中心便是四旋翼飞行器重心,换言之,载体坐标系坐标的原点是四旋翼飞行器几何中心。
当处于初始状态之下,地面坐标系以及机体坐标系的三个轴呈现出相互平行的状态,两个坐标系的关系如图3所示。

图3 地面坐标系与载体坐标系
根据飞行器的位置和姿态,通过一个旋转矩阵来实现两个坐标系之间的转换,即假设在地面坐标系E下,载体坐标系原点的坐标是(x,y,z),倾角是(θ,φ,φ),分别是俯仰角,横滚角,偏航角,则定义在机体坐标系下的向量为。

则转换到地面坐标系下是。

其中R是旋转矩阵。
2.3 基于牛顿-欧拉公式的四旋翼飞行器动力学模型
基于四旋翼飞行器结构特点以及飞行方式(平移运动与旋转运动),现通过牛顿-欧拉方程构建四旋翼飞行器的动力学模型。

在公式(3)中,F所表示的含义为四旋翼飞行器所承受的外力总和,m所表示的含义为四旋翼飞行器质量,V所表示的含义为四旋翼飞行器飞行速度,M所表示的含义为四旋翼飞行器所承受的所有力矩总和,H所表示的含义为四旋翼飞行器相对于地面坐标系的相对动量矩。表1所示是四旋翼飞行器的基本参数。

表1 四旋翼飞行器的基本参数
考虑到四旋翼飞行器的姿态稳定性控制不需要考虑位置和高度的控制,由此以来,便可以只对角度控制情况作出考虑,同时在控制四旋翼飞行器运行稳定性的时候,能够较小的控制其飞行姿态,在分析的过程中,可以将空气阻力所产生的不良影响忽略掉,动力学模型简化后得到的关系表达式如下。

由此可以看出,四旋翼飞行器的数学模型是一个二阶系统。
3 四旋翼飞行器控制系统的设计与实现
根据所建立的模型以及系统模型的分析,飞行控制器总方案如图4所示,主控器选择使用微控芯片STM32[8],同时将惯性测量元件MPU6050作为其辅助元件、磁力计MMC314、气压计BMP280和GPS模块MAX-M8Q,其中MPU6050集成了3轴MEMS陀螺仪和3轴MEMS速度计,利用气压计提供给无人机高度信息,利用MAX-M8Q双模卫星定位模块,确保在四旋翼飞行器运行期间获取精准位置信息,保证精准的控制飞行,实现自主导航,同时利用4G模块实现图片传输和数据传输。
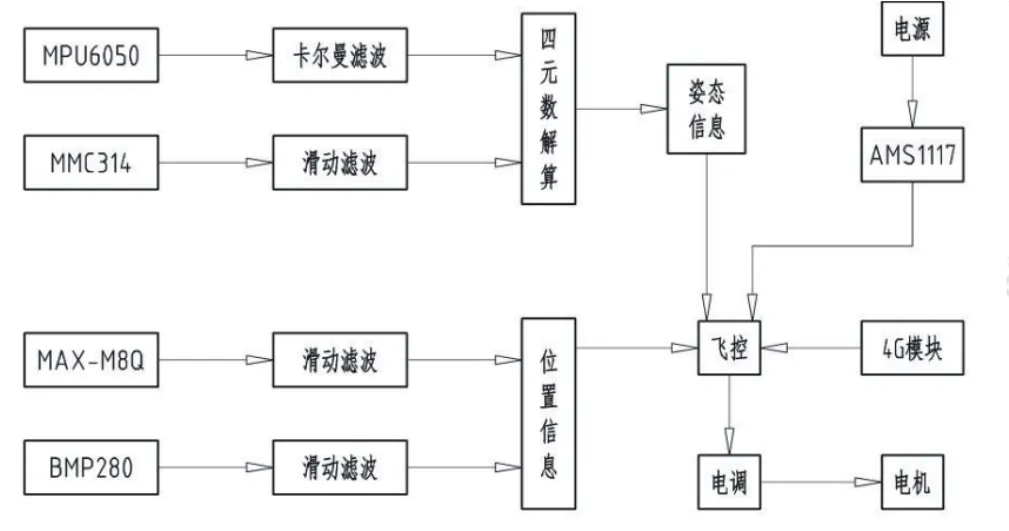
图4 系统总体结构图
3.1 四旋翼无人机控制系统的组成部分
四旋翼无人机控制系统组成大致可分为:(1)控制模块。STM32单片机是最为核心的部件,其主要功能是协调整个系统工作;(2)惯性测量模块。主要以MPU6050为主,其主要功能是对四旋翼飞行器飞行姿态展开测量;(3)无线通信模块。通常使用HM-12的蓝牙模块来与手机实现通信交流;(4)定位导航模块。采用MAX-M8Q双模卫星为主,实现对飞行器的导航功能;(5)电机驱动模块。直流电机主要负责调控旋翼,实现飞行姿态的改变;(6)电源管理模块。实现供电和充电的功能;(7)手机APP模块。这是通过蓝牙模块,将手机与飞行器进行连接,从而实现用手机来操作无人机的运动。
3.2 四旋翼无人机控制系统的软件设计
基于STM32的四旋翼无人机软件设计的内容主要包括姿态解算和PID控制两个部分。
(1)姿态解算属于四旋翼制作的核心部分,就是实现地面坐标系和载体坐标系之间的正确转换,姿态解算通过实时反应出无人机的飞行状态,从而实现对四旋翼无人机的控制。
(2)四旋翼的控制通过PID的控制作用输出四路不同的PWM驱动电机让飞机调整自己的姿态满足当前姿态与期望姿态的误差为0的目标,其中,角度作为外环,角速度作为内环,从而进行姿态双环PID控制。
4 基于PID的四旋翼飞行器姿态控制算法研究
四旋翼飞行器控制算法设计,是飞行器控制系统的主要内容,也是设计过程中的一个难点,现对基于飞行器简化模型的经典PID控制器进行简单介绍。
经典的PID控制方法设计的控制器,通常采用的控制律是闭环控制,在控制方法设计中,由于经典PID控制器在应用时具有结构简单,鲁棒性好,容易实现等特点,在实际工程中得到了广泛的应用。
分析四旋翼飞行器原理可以得知,当四旋翼飞行器在平移运动期间,不会造成姿态角度发生变化,但是姿态角的变化情况,将会造成四旋翼飞行器平动,在控制四旋翼飞行器运行的时候,首先由于旋转运动处于独立状态,要对四旋翼飞行器旋转运动情况展开考虑,之后对四旋翼飞行器平动运动情况展开考虑,划分系统成为两个部分,分别是线运动和角运动。
四旋翼飞行器的飞行速度和位置受到四旋翼飞行器姿态角变化影响,所以在设计的时候,需将系统内环控制器设定为四旋翼飞行器姿态控制器,并且系统外环控制器设定为四旋翼飞行器位置控制器,使用PID控制方法设计的控制器的系统方框图如图5所示。

图5 PID控制方法
5 结语
综上所述,由于小型四旋翼飞行器能够出入空间较小甚至人类所不能及的地方,因此具有非常重要的军用价值和民用价值。只有通过对飞行器的运动特点进行全面分析,才有利于建立出合理的数学模型,从而实现控制算法的精确设计。
