运载火箭姿态系统自适应神经网络容错控制
2021-12-13马艳如石晓荣刘华华梁小辉
马艳如,石晓荣,刘华华,梁小辉,王 青
(1. 北京航空航天大学自动化科学与电气工程学院,北京 100191;2. 北京控制与电子技术研究所,北京 100038;3. 西北工业大学自动化学院,西安 710072)
0 引 言
运载火箭作为太空探索的重要工具,成为许多国家研究重点,例如美国NASA的Ares系列和中国长征系列运载火箭等[1-3]。运载火箭承担载人飞船等任务,发射任务一旦失败,不仅会带来巨大的经济损失,还会影响整个国家的军事和外交等。运载火箭控制的主要挑战是在出现干扰、动力学未建模或建模错误和执行器故障等情况时仍能保证高性能,因此稳健而可靠的飞行控制系统必不可少。
传统飞行控制方法采用增益调度和比例积分微分控制器,而运载火箭气动环境复杂,干扰和不确定性大,采用传统飞行控制方法对其飞行过程进行高精度控制存在一定的难度。为解决上述问题,许多学者提出了先进控制理论[4],如滑模控制[5-8]、自适应神经网络控制[9-13]和非参数自适应控制[14]等方法。文献[15]针对具有外部干扰和模型不确定性的运载火箭设计了一种非奇异快速终端滑模面,并设计了相应的固定时间控制器。文献[16]针对卫星运载火箭姿态控制系统设计了一种基于直接自适应动态反演控制律。文献[17]针对存在外部干扰和参数不确定的运载火箭设计了一种复合自适应模糊H∞控制律。文献[18]针对运载火箭上升段在复杂飞行环境、大不确定性干扰和振动等因素的影响下,传统控制方法难以满足高品质控制需求的问题,进行了自适应增广控制方法研究,以实现对运载火箭姿态的精确控制。文献[19]设计了一种自抗扰控制器抑制运载火箭自身结构参数变化和内外扰动对姿态控制精度和姿态稳定性的影响。
本文针对存在执行器故障的运载火箭姿态控制系统,设计了一种基于自适应径向基神经网络滑模非线性控制律。主要创新点如下:1)直接针对运载火箭非线性姿态动力学模型进行控制律设计,无需对模型进行线性化处理。2)在控制律设计中不仅考虑未知外部干扰,还考虑由于故障可能带来的系统模型发生变化的影响。3)将应用于单输入单输出的自适应径向基神经网络滑模非线性控制律[20]扩展到多输入多输出系统。4)对本文所设计的控制律进行仿真验证,姿态跟踪误差收敛至零,确保了算法的实用性。
1 系统动力学模型
对于某大型运载火箭,考虑安装6台发动机,其中,助推发动机4台,作单向摆动;芯级发动机2台,作双向摆动,图1为火箭发动机布局,箭头方向为发动机摆动方向。火箭三通道姿态可以解耦控制,其中,俯仰通道的控制依靠助推和芯级发动机2、4号摆动实现;偏航通道的控制依靠助推和芯级发动机的1、3摆动实现;滚转通道则需要所有发动机摆动共同参与。
考虑外部干扰,且忽略其弹性模态,建立运载火箭姿态控制系统模型[21]:
(1)
式中:Ω=[θ,α,β]T为姿态角向量,θ为滚转角,α为偏航角,β为俯仰角;ω=[ωx,ωy,ωz]T为角速度向量;J为运载火箭转动惯量矩阵;u为控制输入向量;d为未知的外部干扰向量。S,ω×分别为:

图1 运载火箭发动机布局尾视图Fig.1 Configuration of propulsive rocket engines (view from tail)
等效摆角与芯级发动机、助推发动机摆角关系为:
(2a)
(2b)

(3)
式中:P为发动机推力;XR为发动机喷嘴到火箭顶端的距离;XZ为质心位置;R和r为发动机中心到运载火箭x轴的距离。则控制力矩可以表示为:
u=Bδ
(4)

(5)

本文考虑助推发动机或者芯级发动机出现卡死或失效故障,其故障模型为:
(6)

定义助推发动机和芯级发动机实际摆角为:
(7)

由式(1)-式(7),建立运载火箭动力学模型:
(8)

(9)
式中:f(x)∈R3,G(x)∈R3×3,D∈R3,且定义如下:
(10)
2 运载火箭姿态系统自适应径向基神经网络容错控制
运载火箭姿态系统跟踪控制器的目标是对存在模型不确定性、未建模动态和外部干扰等情况的姿态跟踪系统设计控制器,使得姿态角跟踪误差e能够在有限时间收敛至零。本文针对式(9)描述的运载火箭姿态跟踪系统设计了一种终端滑模控制律;在终端滑模面基础上,利用自适应参数的径向基神经网络逼近系统参数;设计自适应控制项,用来补偿扰动和近似过程误差,以增强系统闭环稳定性和改善瞬态性能。
2.1 终端滑模面设计
在进行控制器设计前,先给出3个假设。

假设2.控制输入向量δ(t)∈L2空间,即δ(t)在任何有限时间内的积分均有界[21]。
假设 3.姿态角指令信号Ωr连续,其前两阶导数一致连续且有界[21]。
为了确保跟踪误差e在有限时间内收敛至零,设计如下非奇异终端滑模面:
s=x2+C1x1+C2sigl(x1)
(11)
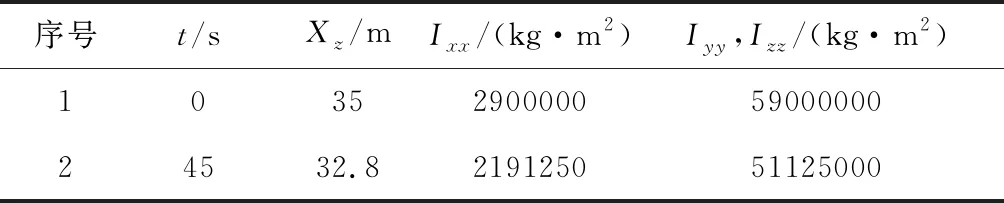
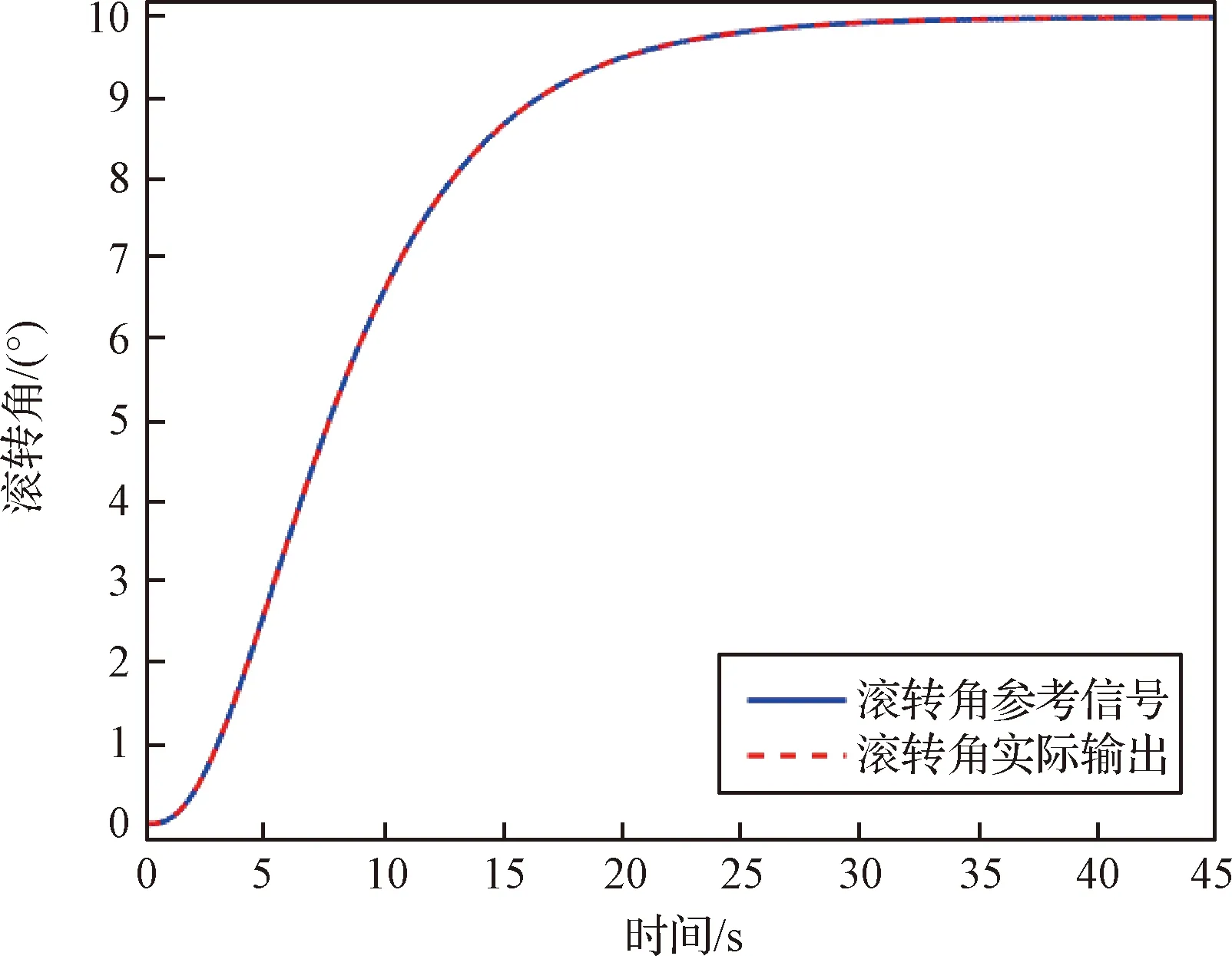
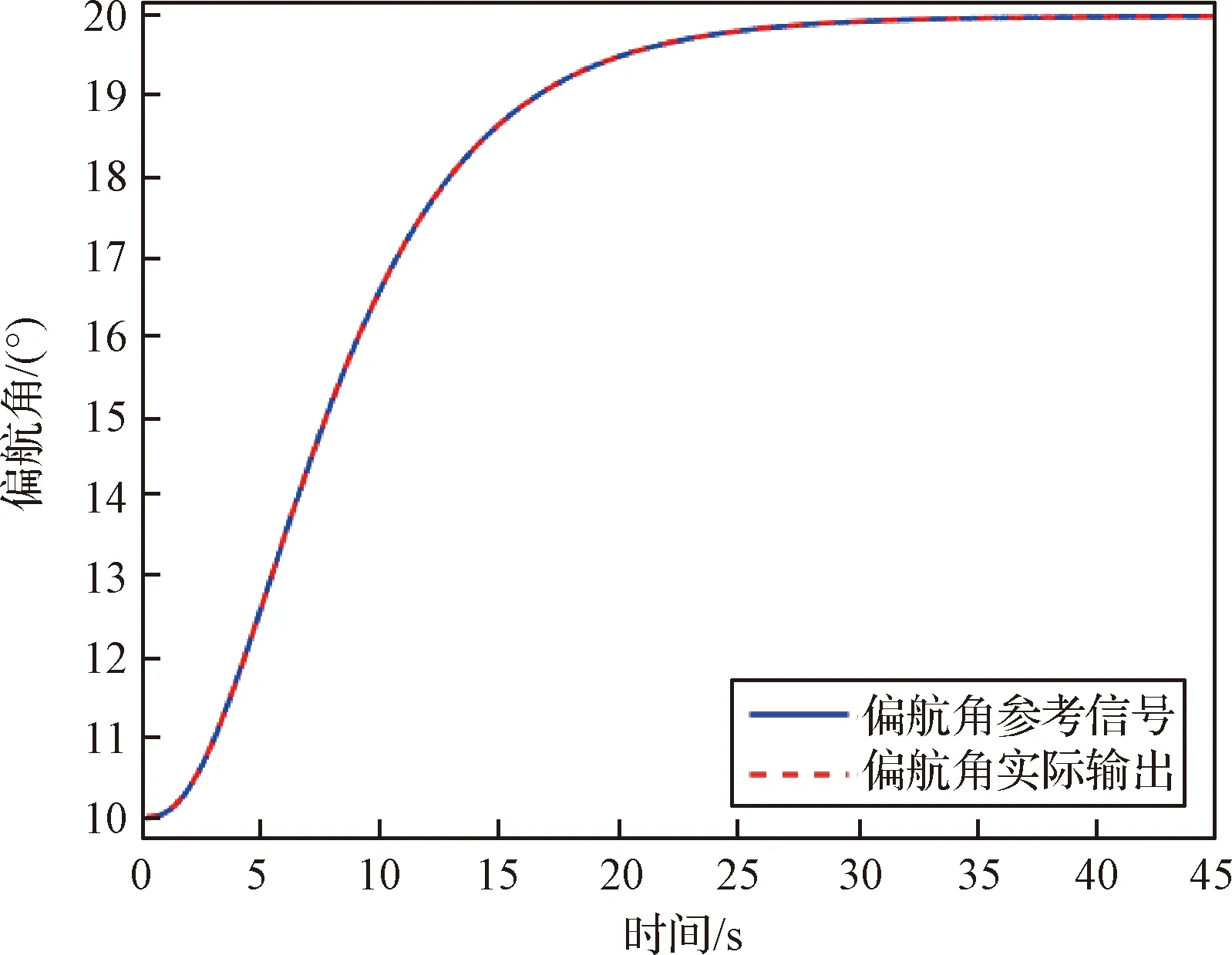
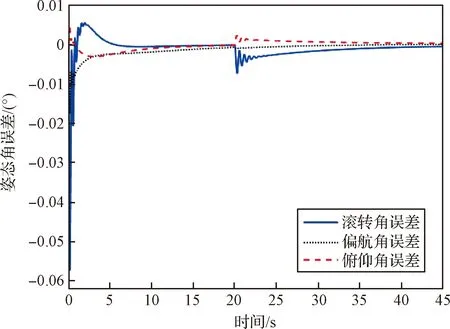
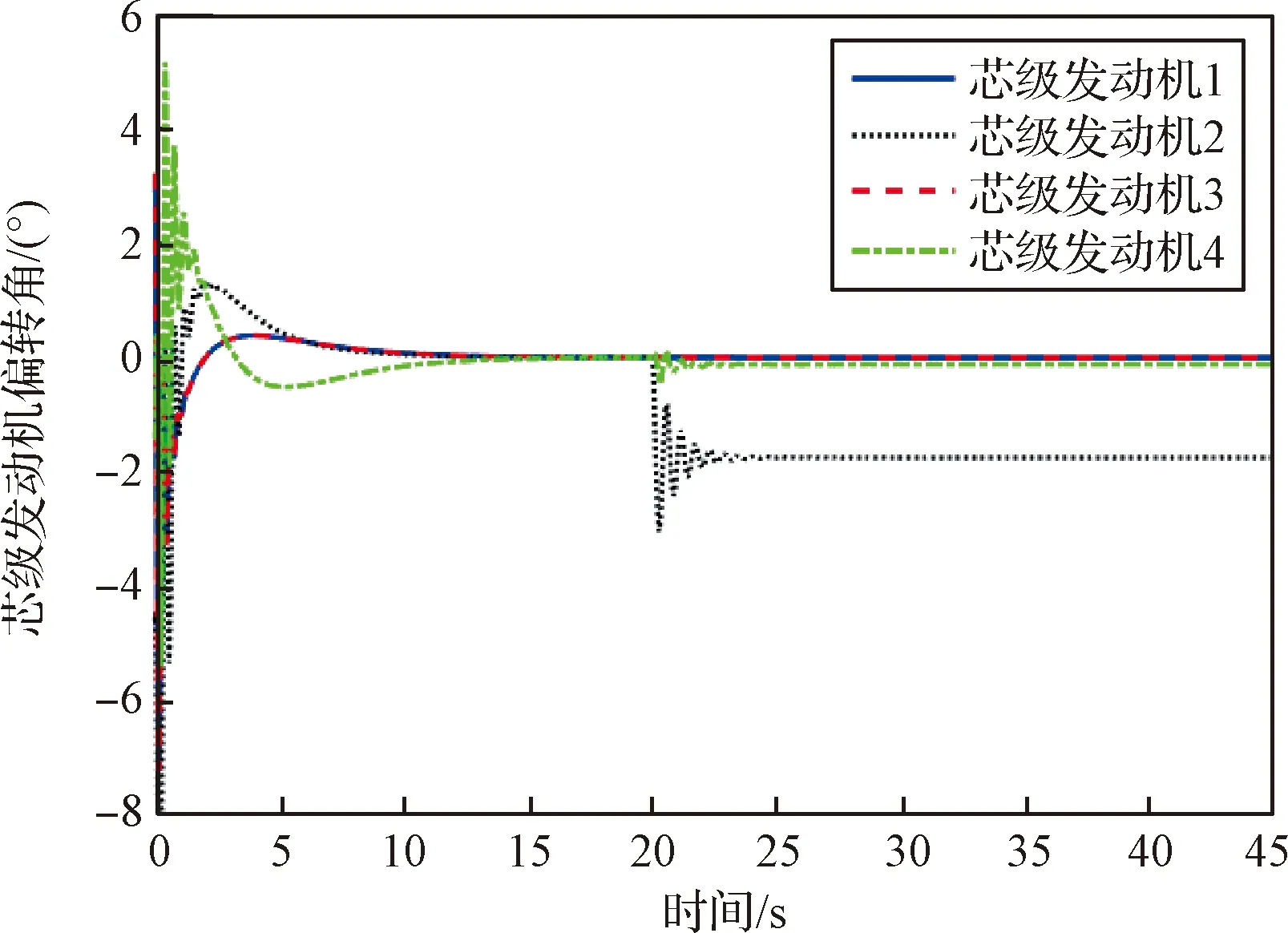
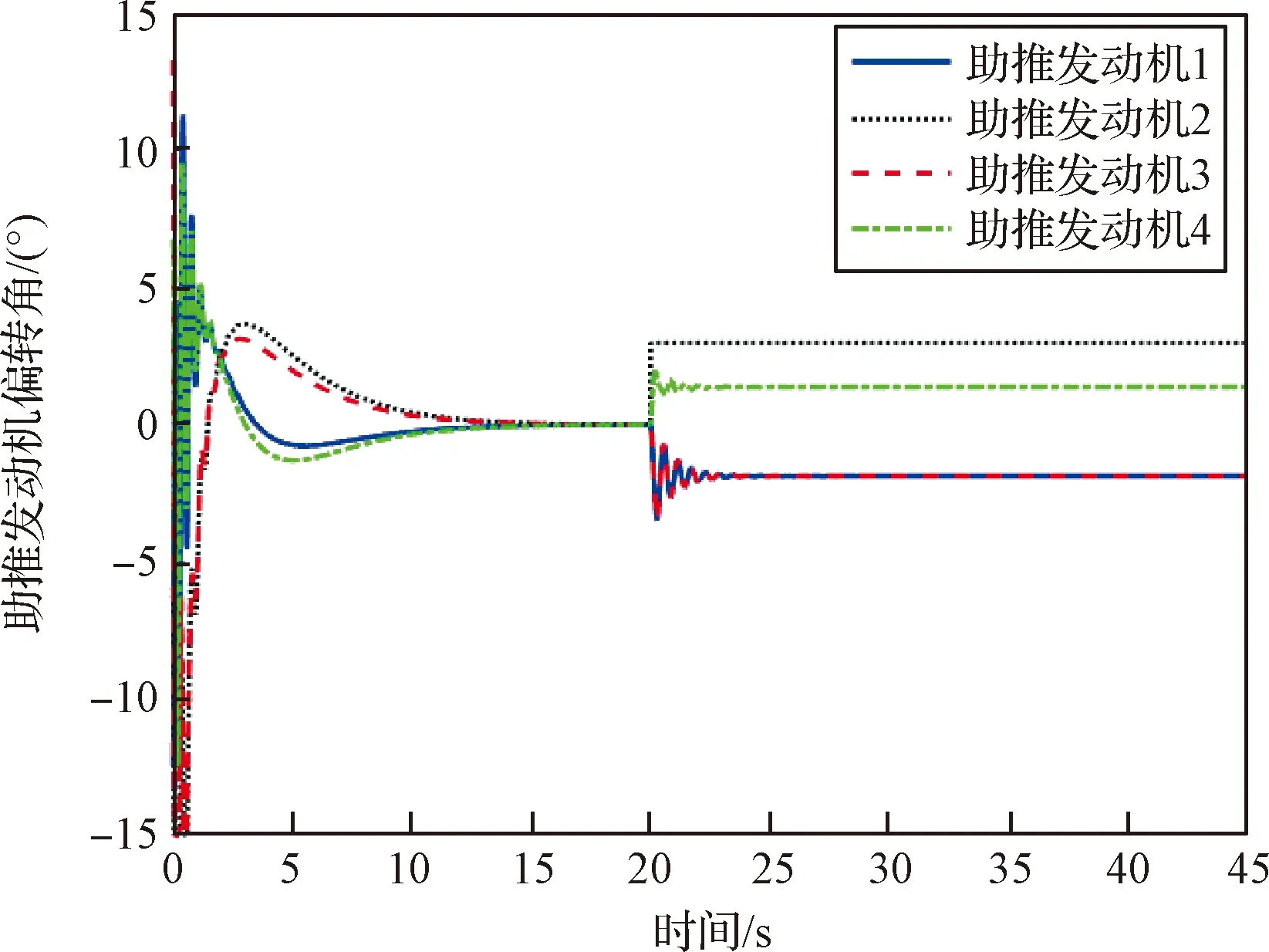
式中:s=[s1,s2,s3]T∈R3, 0 (12) 针对满足上述假设条件下的运载火箭姿控系统,提出了本文的定理1。 定理 1.对于式(9)所示的运载火箭姿态跟踪系统,在假设1-3成立的前提下,若采用式(11)所设计的滑模面,且控制器设计如下: δ=δeq+δd (13) (14) 证明:定义Lyapunov候选函数为: (15) (16) 将式(13)和式(14)代入式(16)可得: (17) (18) 当运载火箭在运行过程中,某个执行机构发生故障,即整个过程中系统模型会发生较大的变化,采用上述终端滑模控制律控制精度可能较差。本节利用径向基神经网络逼近系统参数,当系统参数发生变化时,通过径向基神经网络进行逼近,增加自适应控制项,用来补偿扰动和近似过程中误差,增强系统闭环稳定性和改善瞬态性能。 由径向基神经网络的逼近特性可知,非线性函数h(x)可以表示为: h(x)=(W0)TΦ0(x)+ε0=h0(x,c,σ)+ε0(19) (20) F(x)=(W0)TΦ0(x)+ε0=F0(x,c,σ)+ε0 (21) 将式(19)代入式(16),可得: (22) 式(22)可写为: (23) (25) 由式(23)、(24)和(25)可得: (26) 用ζ代替外部干扰、参数不确定、估计误差和线性化误差: ζ=D+ε1+ε0 (27) 式(26)可写为: (28) 定理 2.对于式(9)所示的运载火箭姿态跟踪系统,在假设1-3成立的前提下,式(29)所设计的控制律使得运载火箭姿态跟踪系统误差在有限时间内收敛至零。 u=G-1(x)(utsm+uRBFNN+uad) (29) 式中:utsm为终端滑模控制项;uRBFNN为使用径向基神经网络逼近的非线性函数F(x);uad为自适应控制项,用来补偿扰动和近似过程误差,增强系统闭环稳定性和改善瞬态性能。三个控制项定义为: (30) (31) 证明:定义Lyapunov候选函数: (32) (33) 将式(28)代入式(33)中,可得: (34) (35) 将式(31)代入式(35)中,可得: (36) 并将式(31)代入,则有: (37) 仿真中,考虑系统如下两种可能的模式: 正常模式:所有执行器正常运行,即λf=diag(1,1,…,1),ηf=0。 表1 运载火箭仿真中的参数Table 1 Parameter of launch vehicle used in numerical simulations 仿真考虑如下情况,系统在前20 s正常运行,当t=20 s时,助推发动机2发生卡死故障,且卡死偏移为σ=3°。所设计的控制律姿态角跟踪结果如图2-4所示。图2-4分别为滚转角、偏航角和俯仰角跟踪轨迹。由图2-4可知,通过所设计的自适应径向基神经网络控制律,运载火箭姿态控制系统能够跟踪姿态指令信号。图5为角速度变化曲线,图6为采用自适应径向基神经网络控制的姿态 图2 滚转角跟踪轨迹Fig.2 Tracking trajectory of roll angle 图3 偏航角跟踪轨迹Fig.3 Tracking trajectory of yaw angle 图4 俯仰角跟踪轨迹Fig.4 Tracking trajectory of pitch angle 图5 角速度变化曲线Fig.5 The curve of angular rate angular velocity 角跟踪误差信号,图7为系统采用非奇异终端滑模控制律得到的姿态角跟踪误差信号。对比图6和图7可知,采用自适应径向基神经网络控制律的误差收敛速度比终端滑模控制律的误差收敛速度快,当故障发生时,其误差信号也能快速收敛为零。而 图6 姿态角跟踪误差,本文方法Fig.6 Tracking error of attitude angle 终端滑模控制律最终收敛到接近于零的常数。图8为运载火箭芯级发动机摆角变化曲线,如图8所示,当助推发动机2在20 s发生卡死故障时,芯级发动机1、3和4摆角不变,芯级发动机2摆角发生变化,且在较短时间内收敛至一个常数。图9为运载火箭助推发动机摆角变化曲线,如图9所示,助推发动机 图7 姿态角跟踪误差,终端滑模方法Fig.7 Tracking error of attitude angle 图8 芯级发动机偏转角曲线Fig.8 The curve of central rocket engines deflection angle 图9 助推发动机偏转角曲线Fig.9 The curve of strap-on rocket boosters engines deflection angle 2在20 s时发生突变,且维持在某个常数不变;助推发动机1、3和4也发生变化,且在较短时间内收敛至某个常数。即当运载火箭某个助推发动机发生故障时,控制器通过控制其余助推发动机和芯级发动机摆角来平衡该故障带来的影响。因此,本文所用方法在运载火箭执行器卡死故障下仍具有较高的控制精度和鲁棒性。 本文针对存在执行机构卡死故障的运载火箭姿态跟踪系统设计了一种基于终端滑模自适应径向基神经网络控制律,所设计的控制器能够确保系统在较短时间内收敛至零,连续变化的控制律完全消除了滑模控制中的抖振现象。此外,该控制器仅用到控制输入矩阵的信息,利用径向基神经网络逼近系统参数,采用自适应控制项补偿外部干扰和近似过程中的误差,使其具有较好的鲁棒性,仿真结果表明基于终端滑模自适应径向基神经网络控制律具有较好的控制效果。



2.2 自适应径向基神经网络控制









3 仿真校验




4 结 论
