基于航母运动的舰载机自动着舰落点分布研究
2021-12-12颜世伟李海旭
颜世伟,郝 佳,李海旭
(1.中国人民解放军92942部队,北京 100161;2.中国船舶系统工程研究院,北京 100036)
0 引 言
对于舰载机来说,安全降落到母舰是一项非常艰巨的任务。航母虽然是一个庞然大物,但与陆地机场相比却依然很小,其着舰跑道长度不足陆地机场跑道长度的1/10,为确保舰载机在如此短小的飞行甲板上安全降落,需要先进的装备和飞行员高超的技术。舰载机着舰时,尾钩应准确地勾住甲板上的阻拦索,动能迅速地被阻拦装置缓冲器吸收,舰载机经短距离滑跑后停下。舰载机着舰时,着舰点必须非常准确,若触舰点太靠向舰首方向,舰载机会脱钩;若触舰点太靠向舰尾方向,舰载机则又可能与航母舰尾相撞。因此,如何控制舰载机准确着舰关系到整个任务飞行过程的成败与否,是航母及其相关技术领域急需解决的关键性问题。为了提高恶劣气象条件下舰载机着舰安全性,美国首先开展了全自动着舰引导技术的研究和应用。美国于1948年提出舰载机全自动着舰需求后,研制了基于雷达的AN/SPN-10自动着舰引导系统,后逐步升级到AN/SPN-46自动着舰引导系统,目前美国各型航母均已装备了AN/SPN-46自动着舰引导系统,大大提高了舰载机在航母上的着舰成功率。基于雷达的全自动着舰引导系统通过舰载精密跟踪雷达等手段测量出舰载机的空间相对位置,再结合航母自身的运动数据和气象参数,利用导引指令计算机解算处理后形成舰载机控制指令,并通过数据链发送给舰载机,由飞控系统和自动油门系统不断修正飞行轨迹,使舰载机按预定的理想下滑道飞行,从而达到引导舰载机自动着舰的目的[1]。
1 舰载机模型
为开展舰载机在不同海况下全自动着舰引导研究,需对相关的舰载机、母舰和气流场等进行建模,以便开展后续仿真和研究工作。
1.1 空气动力学模型
以某型舰载机作为仿真对象,其空气动力学模型参数主要包括升力、阻力、侧力、俯仰力矩、滚转力矩和偏航力矩,气动参数为高维分段线性表,其中反映了迎角、侧滑角、速度、高度、平尾、襟翼等各项因素的影响,舰载机着舰过程气动阻力和滚转力矩模型如图1所示。

图1 气动参数模型Fig.1 Model of aerodynamic parameters
1.2 飞控系统模型
舰载机飞控系统包括纵向杆输入的前向增益、俯仰角速度增稳、迎角稳定3个主要回路,并通过平尾等舵面动作来实现舰载机纵向姿态调整。其中,舰载机纵向飞控系统模型如图2所示,系统包括纵向杆输入的前向增益、俯仰角速度增稳、迎角稳定3个主要回路,并通过平尾等舵面动作来实现飞机纵向姿态调整。横向飞控系统模型如图3所示,系统包括横向杆输入的前向策略、横滚角速度增稳、迎角稳定3个主要回路,并通过差动平尾、副翼等舵面动作来实现舰载机横向姿态调整。舰载机侧向飞控系统模型如图4所示,包括方向舵输入的前向增益、偏航角速度增稳、侧向过载阻尼、横向杆动作的协调补偿等控制策略,并通过垂直尾翼的动作来实现舰载机姿态调整。

图2 纵向飞控系统原理图Fig.2 Structure block of longitudinal flight control system

图3 横向飞控系统原理图Fig.3 Structure block of lateral flight control system

图4 侧向飞控系统原理图Fig.4 Structure block of directional flight control system
1.3 纵向线性小扰动模型
虽然舰载机非线性仿真模型能够得到更加真实的仿真结果,但线性化模型在研究引导律设计、参数优化、系统频域特性等方面存在一定优势,针对某型舰载机给出其纵向线性小扰动模型。拟采用线性小扰动方程研究舰载机对大气紊流的响应,假设风速远小于飞行速度,以无风时的对称定常直线飞行为基准,把由风引起的附加力和力矩作为外加干扰项引入线性模型。首先需要分析大地坐标系oxg轴方向(水平)的空气速度wxg和oxg轴(垂直)方向的空气速度wzg对飞行的影响。
若wxg为正值,即风速沿xg轴分量与舰载机前进方向相同,就气动效果来说相当于减小了舰载机的空速;若wzg负值,即法向风速朝上,则对舰载机运动的影响如图5所示。

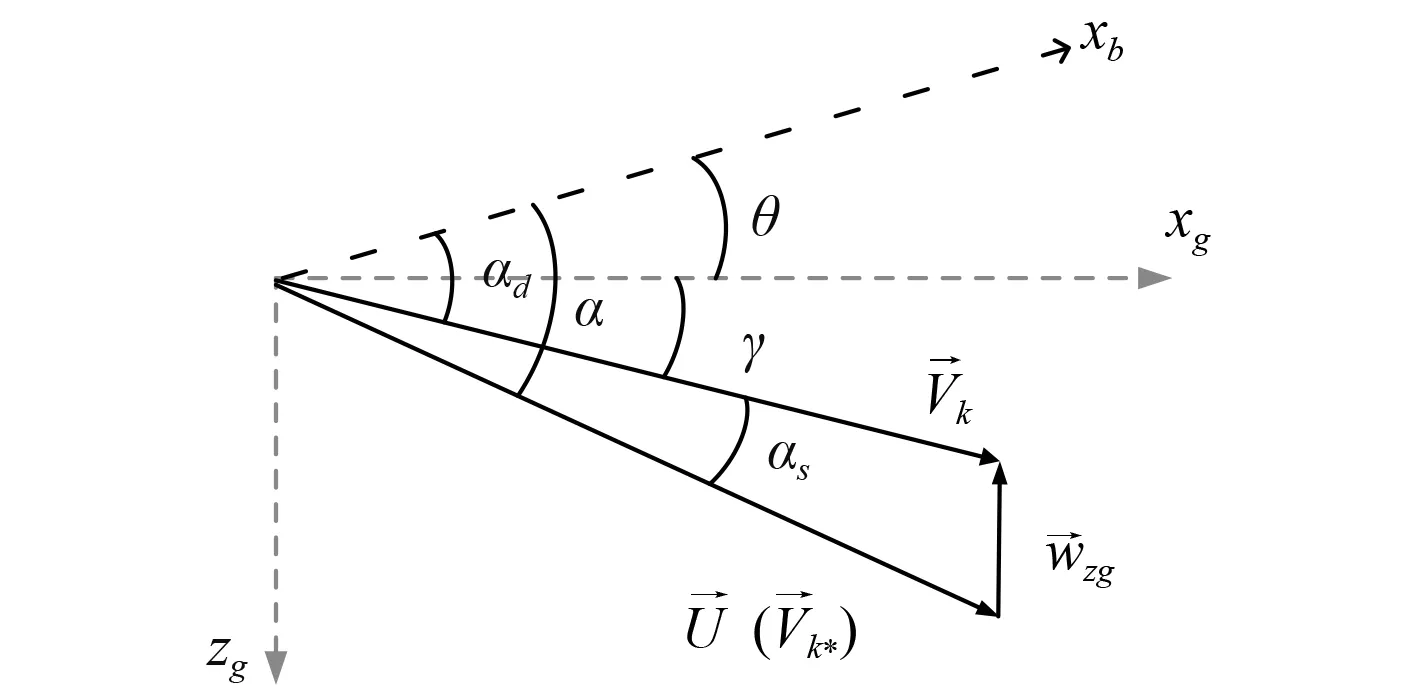
图5 上升突风对飞行的短时间影响Fig.5 The influence of vertical gust
突风在短时间的作用效果是:舰载机俯仰角不变,迎角和航迹角变化相同幅度,有式(2)成立,式中 αd为航速矢量与本体坐标轴xb的夹角,称为地速迎角。虽然航速发生变化,但空速基本保持不变,且根据风速远小于航速,又可推出

因为舰载机的基准运动状态属于“铅垂平面下的对称飞行”,所以舰载机的横侧向角度、角速度均为零,即
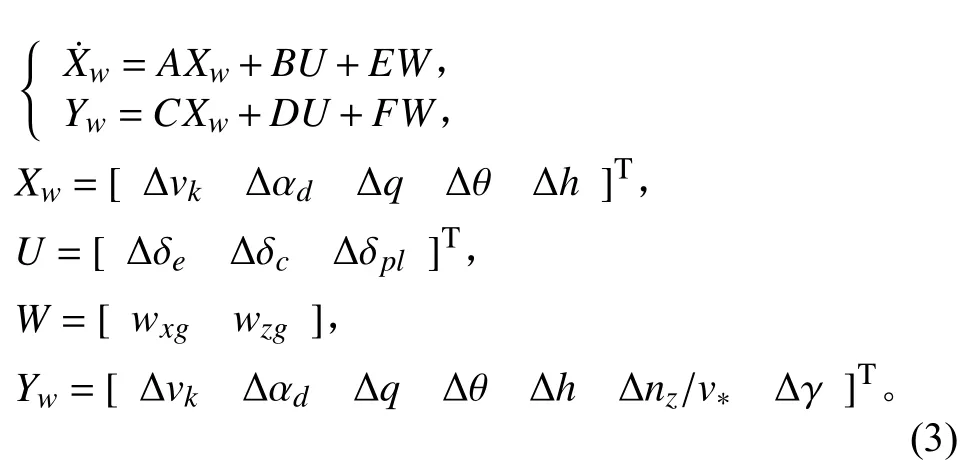
据此,舰载机可将小扰动方程分两组,其中一组包含纵向小扰动方程组。又把纵向方程组分为两类:其中一类互相影响而必须联立求解,为耦合方程组;另一类可以在耦合方程解出后单独求解,而不影响其他方程,成为非耦合方程。经过整理化简后,可得到纵向小扰动方程的状态矩阵形式。除舵面偏量、油门开度(油门杆位置)偏量的单位为度(°),其他角度的偏量均以弧度(rad)为单位,角速度的偏量单位均为rad/s。
1.4 全自动引导模型
在参考美国F/A-18A舰载机纵向引导律设计的基础上,给出基于Hdot指令的纵向引导律的一般设计方法。Hdot指令引导律以下沉速率作为航迹控制环的控制输出和自动驾驶的控制输入。Hdot指令引导律的结构如图6所示,以下沉速率作为自动驾驶仪控制目标,要求飞行控制系统具有快速下沉速率的响应能力。以前的舰载机飞行控制系统设计以姿态控制为主,因此姿态响应速度较快,而下沉率响应较慢。为了满足Hdot指令引导律的结构对下沉速率响应速度的要求,需要对原有飞行控制系统进行改造。因此Hdot指令引导律设计包括:飞行控制系统设计、自动驾驶仪设计和引导律设计3部分[2]。
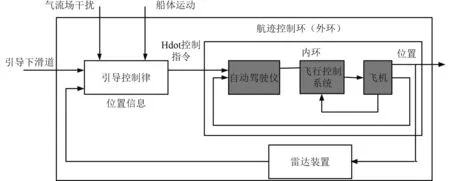
图6 俯仰角指令引导律的结构图Fig.6 Structure block of pitch angle command guidance law
Hdot指令自动驾驶仪一般采用如下形式:

式中:qcom为俯仰角角速度指令,为来自引导系统的引导指令,为下沉率反馈,为垂直加速度反馈,和为 前三者 的系数 。
此外,为了保证着舰过程的安全性和对异常扰动的抵抗能力,飞行控制系统一般需要对俯仰角速度进行限位,F/A-18A舰载机飞行控制系统中俯仰角速度指令限位为3°/s,这也对俯仰角速度内环响应提出了一定要求。
1.5 舰尾流模型
航母舰尾流对舰载机飞行姿态、轨迹和控制都有较大影响,关系到舰载机着舰过程的安全,为研究其对着舰过程和舰载机落点的影响,有必要先对其进行建模。舰尾流场频谱模型将舰尾气流场按水平、横向和垂直3个方向分别建模,每个方向包括四大部分:大气紊流、舰尾气流的稳态分量、舰尾气流的周期分量和舰尾气流的随机分量,舰尾气流场的各个分量如表1所示。水平尾流Ug、 横向尾流Vg和垂直尾流Wg与各个分量之间的关系如下式:

表1 舰尾气流扰动的各个分量Tab.1
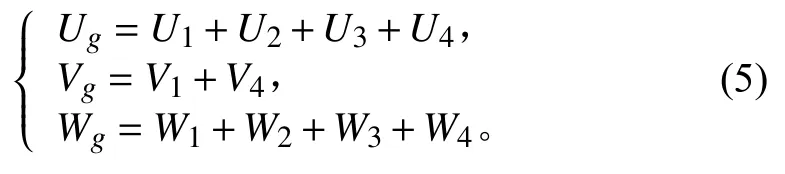
由于本文仅关心纵向回路气流扰动作用,因此下面主要针对Ug和Wg各分量模型进行研究[3]。
自由大气随机紊流分量与舰载机和航母的相对位置无关。MIL-F-8785C通过空间功率谱密度的形式给出水平和垂直两个方向的大气紊流,分别为:

将上述空间谱密度转化为时间谱密度,以便进行仿真计算。

图7 自由大气紊流分量Fig.7 The turbulence component of atmosphere
舰尾流稳态分量由稳态风和一个占主导地位的舰尾上洗风组成,它们是距离的函数,航母尾流周期分量是随着航母纵摇频率、纵摇幅度、甲板风和舰载机的相对距离不同而变化的,舰尾流随机分量模型,可以通过对一个白噪声信号进行滤波来计算,计算方法如下:

式中: σ (x)=RMS幅度,ft/s; τ (x)=时间常数,s,其仿真结果如图8所示。

图8 舰尾随机紊流仿真结果Fig.8 The simulation result of random wake turbulence
2 航母运动模型
航母运动的扰动分量受海风和浪涌的随机特性的影响,很难给出解析的模型,工程上普遍采用统计分析的方法来描述航母的扰动运动。大量的实测数据和理论分析表明在最终着舰的几十秒范围内,航母运动近似为平稳的随机过程,可以用线性方程来描述。所以可将航母实测运动功率谱转化为成型滤波器,然后利用白噪声通过成型滤波器的方法来模拟来航母扰动运动,用这种方法来模拟航母的横摇、纵摇和垂荡运动,仿真曲线如图9~图11所示。
横摇运动成型滤波器:

纵摇运动成型滤波器:

垂荡运动成型滤波器:


图9 横摇运动仿真曲线Fig.9 The simulation result of rolling motion

图10 纵摇运动仿真曲线Fig.10 The simulation result of pitching motion

图11 垂荡运动仿真曲线Fig.11 The simulation result of heave motion
3 母舰运动及甲板风对着舰影响
为了解决舰载机轨迹跟踪过程的滞后,须引入偏差信息的预估和超前,舰载机在跟踪甲板运动主频信号时,会有一定滞后时间,必须通过预报或补偿技术,国外采用带有超前作用的滤波器来实现相位超前,但是当舰载机跟踪滞后较大时,仅用滤波器易导致误差过大,可与甲板运动预报方法相结合。经研究发现,甲板运动预报算法已具有了较高的精度,还要研究仅靠甲板预报算法实现滞后补偿的策略,并且会对比2种方案的精度[4]。
补偿策略加预报策略为:甲板运动信号为了解决舰载机轨迹跟踪过程的滞后,须引入偏差信息的预估和超前,针对性地设计补偿算法。将采用甲板运动预报技术和超前滤波器技术结合,共同实现信号的滞后补偿。同时,为了抑制信号超前过程中引入的放大噪声,在补偿回路中加入低通滤波器。仅预报策略为:直接根据舰载机跟踪甲板运动过程的滞后大小,选择合适的预报时间,然后将预报后的信号叠加至舰载机高度跟踪的期望中。
为了检验全自动着舰控制系统在多种扰动因素影响下的综合偏差表现,在仿真中同时加入甲板运动影响和舰尾扰流影响,并加入甲板运动补偿算法和稳态微流的补偿算法,甲板运动补偿算法采用预报加补偿的综合策略,选用5~6级海况数据,进行500次仿真,最终得到纵向落点偏差绝对值均值为5.89 m,最大值为22.45 m,偏差方差为53.96 m。500次仿真数据统计的纵向落点偏差概率分布直方图如图12所示,仿真结果基本符合正态分布特性。

图12 纵向落点偏差分布Fig.12 The distribution of longitudinal touchdown points
从综合仿真结果看出,当考虑甲板运动和舰尾流综合影响时,纵向落点偏差分布明显比单一因素影响更大,系统的落点偏差无法保证绝大部分落在正负1道索之内。
图13给出了不同海况下的100次仿真落点分布情况,可以看出随着海况增加,纵向落点分布会明显增加,但5级海况时其变化幅度基本限制在3道索之内,保证了舰载机大部分挂索仍集中分布在2和3道索,横向落点偏差没有随着海况增加明显增加。

图13 不同海况落点分布Fig.13 The distribution of touchdown points for different sea state
4 仿真结果分析
不同海况和舰尾流条件下舰载机着舰落点仿真分析结果表明,现有全自动着舰控制方案产生的落点偏差仍然偏大。从4级海况到5级海况时,海况越高,落点散布和偏差越大,纵向平均偏差最大增加超过2倍。不同航速和浪向下舰载机落点仿真结果表明看,在甲板摇摆和升沉幅度相当的情况下,航行过程中舰载机纵向落点偏差更大,这主要是由于航母航行时,舰载机相对惯性空间下滑角变小,导致在同等高度偏差下对应的纵向落点偏差散射范围更大;舰载机横向落点偏差随着海况增加有稳定的上升趋势,总体较小,而且受浪向角和甲板航行等因素影响较小。为实现全自动着舰在不同海况下的可靠应用,可以从以下两个方面进行改进优化:一是提高甲板运动预报及补偿的精度,降低因母舰运动对落点精度的影响;二是提高全自动着舰控制系统对抗随机扰流的能力,采用带有自适应能力或动态变参数的控制策略,减少突风、舰尾流等随机扰动对舰载机的影响。
