水下无人运输平台关键技术及发展趋势
2021-12-12王书玉
王书玉,张 玮,李 磊
(海军研究院, 北京 100171)
0 引 言
近几年,人工智能、自动驾驶及导航技术的进步使得无人运输系统迅速发展,在水(面)陆空三种领域中产生了无人船、无人车以及无人机的新型运输工具和模式,同时大型无人水下航行器(Unmanned Underwater Vehicle, UUV)的发展使得水下货运成为新的运输方式,有望形成水下、水面、陆地及空中全方位运输系统[1-2]。
得益于相关科学技术的进步及军事需求,大型UUV近些年发展起来。不同运输方式具有不同特点[3-7],其中水下物资运输能够直接避免被空天侦察设备探测,并且相比于潜艇等水下物体,其体积较小,被声呐探测的几率也要小很多,因此在战时,其物资输送能力更加重要。
美国DARPA曾在2013年发布“水螅计划”项目招标文件,旨在开发一种战场上隐蔽运输并部署小型无人机和UUV的大型UUV,如图1所示。拟采用开放式标准模块化技术, 使母艇具有可扩展性和低成本,能够根据海军作战要求进行快速反应。
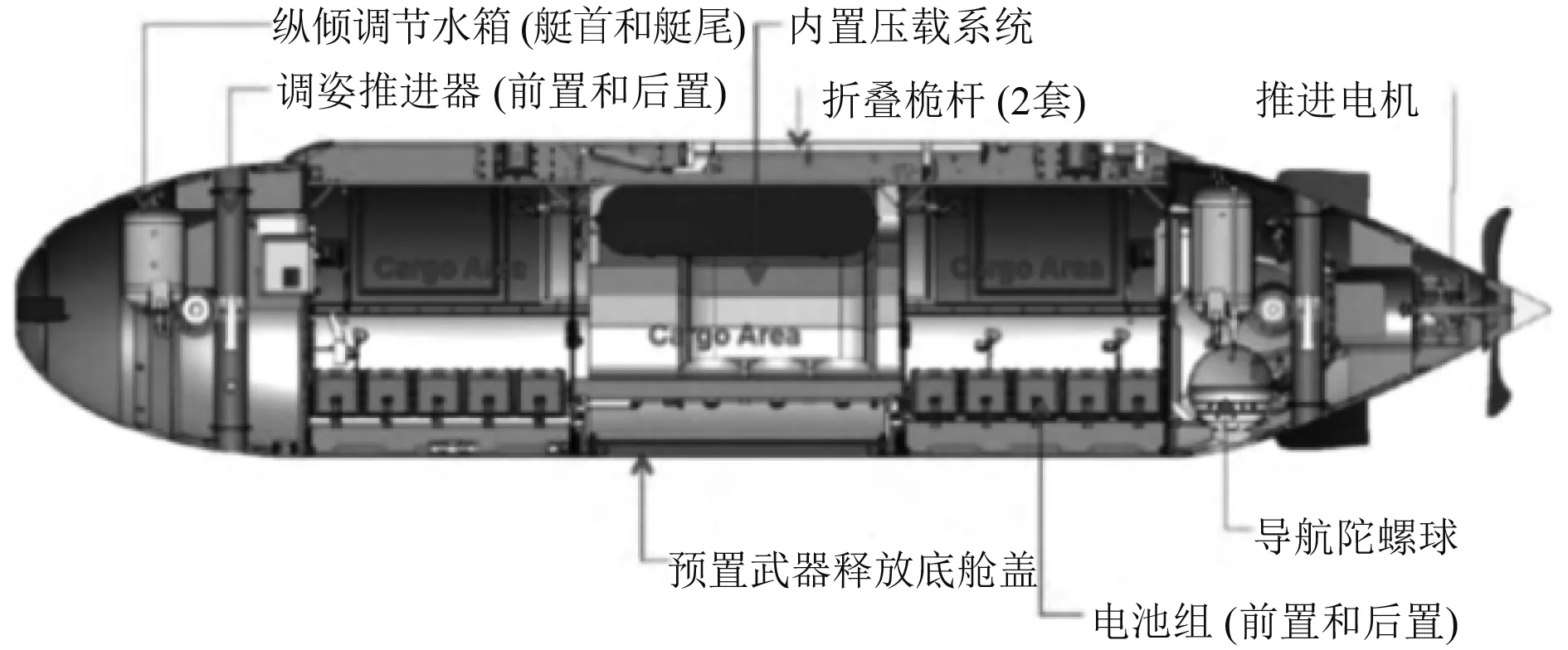
图1 “水螅”UUV内部结构图Fig.1 UUV structure
水下补给运输方式不受海况和气候影响,同时具备隐蔽性等独特优势。本文从水下无人运输平台的研发现状出发,重点分析研发水下无人运输平台面临的关键技术及难点,为后续的实际工程研究提供参考。
1 水下无人运输关键技术及难点
1.1 动力推进技术
水下无人运输平台完成货物装载后,离开码头并驶出潟湖,相较于外海,潟湖内空间闭塞,并有船舶等障碍物,需完成转向、离港动作,对低速可操纵性要求较高。全驱动运输平台操控灵活,但是其控制系统过于复杂、耗能较高,众多的推进器也大量挤占了运输平台的运载区、能源区的空间,降低了运输平台的效能比。因此,大型无人运输平台多采取欠驱动设计,常见的有主推进器+鳍舵或单矢量推进器2种驱动方案。
一般鳍舵主要布局有十字型和X型,如美国波音公司设计的Orca LDUUV就采用了主推进器X型鳍舵,4个鳍舵呈X型正交布置、舵轴中心线 UUV中对称面呈±45°夹角,如图2所示。十字型舵与X型舵结构相似只是布置角度不同,这种主推进器+鳍舵的推进效率高,技术成熟,缺点在于舵效随推进速度的降低衰弱明显,运输UUV在潟湖内低速航行时,无法实现快速机动躲避障碍,容易造成危险。矢量推进方式是指通过转动推进器或者导流片来改变尾流方向,产生多个自由度的运动力和力矩,在低速下具有良好的姿态控制效果。如美国蓝旗金枪鱼公司生产的Bluefin系列UUV均采用矢量推进方式,如图3所示。这种推进器除了在直线方向提供推力外,还能同时或单独控制UUV的纵倾、首摇,且转向性能与速度大小相关性弱,低速转向性较好[8]。
图2 美国波音公司 Orca LDUUVFig.2 Boeing Orca LDUUV

图3 美国Bulefin系列AUVFig.3 American Bulefin series AUV
泵喷推进一般在船舶推进比较常见,一般推力较大,效率也比较高,在高速下相比螺旋桨推进器对空泡现象承受度较高,可以通过改变喷射方向或者鳍舵实现多自由度控制,其缺点在于仅有尾部能提供转向力矩,应用于运输UUV入坞、靠岸时需较长的规划路径进行位置摆正,否则容易出现横向速度较大,姿态摆正不及时的问题[9]。
结合控制难度和结构设计情况,大型水下无人运输平台可采用尾部矢量推进器和首部侧向推进器结合的推进方案,加强其低速操纵性,减少靠岸时用于摆正位置的路径消耗,快速靠岸,以适应岛礁潟湖面积小、障碍多的特点。
1.2 模块化载货箱适配设计
1)载物箱储存功能设计
运输平台运输的物资多样,一般包括弹药、血浆、药品、食品、淡水、燃料、电子元件等,这些战略物资对于防潮、防腐、防振、低温等贮存条件的需求各不相同,为确保运输过程中物资安全[10],送达后物资状态良好,不致失效,需要对载物箱进行针对性设计以满足物资对贮存条件和运输条件的的差异性需求,并符合相应技术标准。
如德国大排量模块化水下航行器项目(MUM)中,蒂森克虏伯海洋系统公司为MUM运输的物资设计了如钢瓶、气囊、复合材料减震箱等多种内包装[11],如图4所示。通过在外部框架设置多条张力缆编织成网的方式,将内包装限制在一个较小的运动空间内实现固定。相较于如卡扣、螺钉等机械固定,这种张力缆结构的优点有:张力缆能够随着内包装形状差异产生适应性变化,通用性好;多条张力缆由框架的不同节点出发交织在一起形成稳定的包络面,固定效果好;取放物资时仅需要改变张力缆的固定状态,不需要拆解框架结构,物资装卸方便。

图4 MUM项目的载货箱Fig.4 Cargo containers for MUM project
2)载物箱结构功能设计
水下无人运输平台在水下行驶时承受着巨大水压,高强度承压壳体十分厚重且制造成本高昂,因此大中型水下无人运输平台多采用非耐压结构设计,仅对部分关键模块设计耐压壳体及水密舱[12]。为最大化载物空间,水下无人运输平台载物区设计为非耐压结构,物资盛放在载物箱内湿式运输。
载物箱的结构设计一方面应具备足够的强度和刚度,能够承受吊放、回收及使用过程的载荷,另一方面应具备低质量特征,以增加UUV的有效负载能力,进而提升整体性能。此外,非耐压承载结构还应具有较高的固有频率特征,以提高系统的动态稳定性。在运输UUV中,为了最大化运输空间、提高载货箱模块通用性[13],UUV往往要设计成壳体较薄、横截面为矩形的结构。运输UUV货舱区的结构刚度主要由载货箱骨架承担,因此需要设计质量轻薄、结构刚度较高且便于装卸的标准尺寸桁架结构作为载货箱骨架,如图5所示。美国MUM项目的载货箱骨架使用先进复合材料制成的载货箱骨架使用了六面体三角形桁架结构,一端开口用于物资装卸,载物箱尺寸未标准化设计,不同型号的载物箱尺寸均为最小单元尺寸的整数倍,便于根据需要排列组合,利于集运化运输、储存[14-15]。

图5 MUM项目的载货箱骨架Fig.5 Cargo box framework of MUM project
1.3 智能航行技术
1)自主航行
要实现自主航行,首先需要感知外在环境和运动信息,建立类人理解模型,解释航行要素,分析风险级别;其次,需要规划航线,制定航行策略。最后,设计航行控制器以实现对水下运输平台的航行控制。
智能水下无人运输平台发展的目标是自主驾驶,然而,在此之前,智能水下无人运输平台将处于预编程驾驶阶段。自主航行驾驶问题复杂,涉及信息感知、态势认知、航行决策多个维度,需要逐一深入研究解决。
2)靠离泊与锚泊
靠离泊和锚泊属于运输平台航行中的典型复杂工况,长期来看,靠离泊和锚泊可以实现无人化。无人靠离泊可以借助码头真空吸力设备以及拥有动力定位实现,而锚泊则需要借助自动锚泊机替代人工锚泊。但在此之前,无论是靠离泊还是锚泊,都将经历由远程操作实现的阶段。
1.4 动力能源技术
续航力就是海上运输平台的生命力,现有水下运输平台多采用蓄电池动力,续航力普遍仅有10~40 h,大大限制了其作业效率。目前,世界各海洋强国均投入大量资金用于开发新型电池,主要技术路线如下:
1)开发高功率密度电池
美国LDUUV项目要求燃料电池容量达到1.8 MW·h,比能量达到1 (kW·h)/L,从而将续航力增加值70 d,期间可加注燃料实现多次启停[16]。美国通用原子公司的高功率密度锂离子容错(LiFT)电池(见图6),具有模块化设计和单节电池容错功能大大提高了使用安全性,由于LiFT具有被动安全功能,自身能保持在安全温度下运行无需外加冷却系统,降低了能源模块的重量和复杂度,处于世界领先水平,获得了美国Snakehead LDUUV项目的合同[17]。
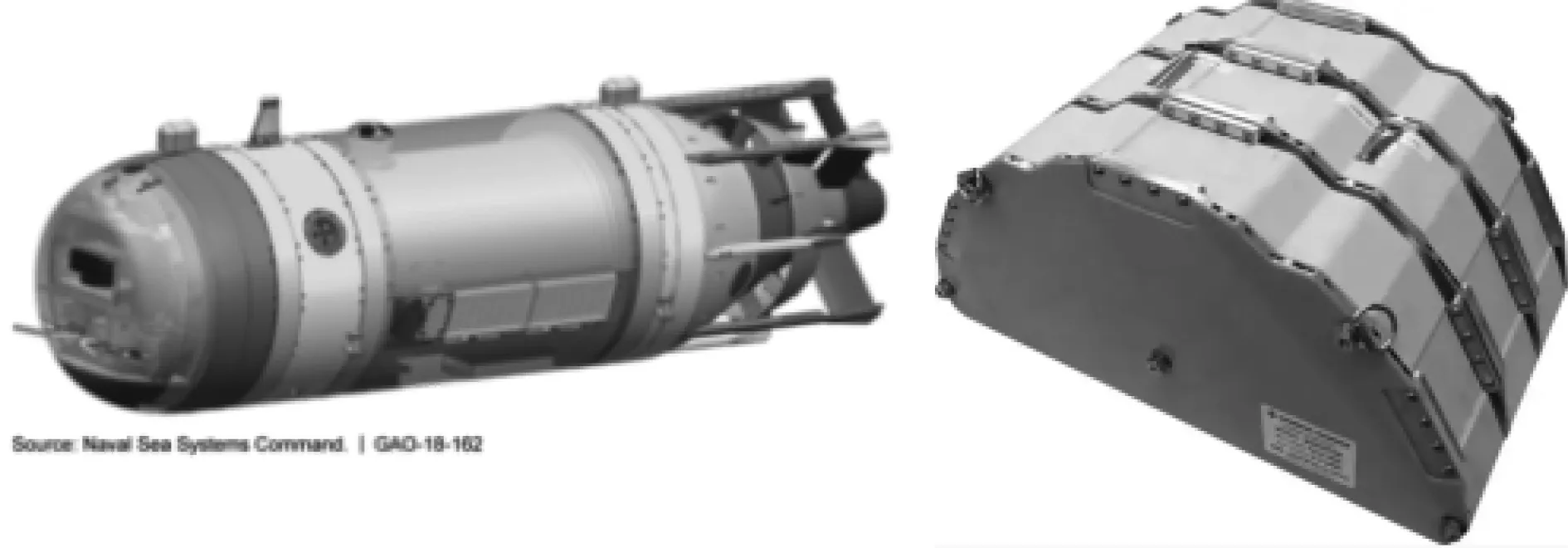
图6 Snakehead LDUUV及其LiFT电池Fig.6 Snakehead LDUUV and lift battery
美国麻省理工大学与L3 Techologies公司联合开发了铝-海水电池,该电池由活性铝阳极、碱性电解质和多种元素合金阴极组成,海水作为氧化剂参与电池系统的电化学反应,在阴极被分解成氢氧离子和氢气,氢氧离子与铝阳极相互作用产生氢氧化铝并释放电子,为电路提供能量,氢氧化铝和氢气作为无害废物被排出UUV。该电池仅在充满海水时被激活,可在各种极端条件下表现出惰性,安全性高于锂离子电池,其功率密度最高可达950Wh/L,具有较好的的发展前景[18]。
2)利用海洋能源充电
美国2009年研发出SOLO-TREC无人潜航器,是世界首个温差能驱动的无人潜航器,主要用于环境监测、海洋科学勘察、海洋学研究等,如图7所示。这种潜航器重84 kg,可在海平面与500 m深处往返运行。SOLO-TREC无人潜航器利用体积随温度变化的相变材料为蓄电池充电,相变材料在海平面时遇热体积膨胀,在深海时遇冷体积缩小,相变材料与油囊结合使用,膨胀/收缩过程中产生的高压油可收集起来,定时释放,从而驱动液压马达发电,每次潜水可给电池充电约1.6 Wh。由于海洋温差沿竖直方向分布,因此温差能充电系统并不适用于长时间定深巡航的运输UUV,但可以水下充电站相结合组成海上无人充电网络,为运输UUV提供充电服务。

图7 美国SOLO-TREC无人潜航器及其温差能发电系统Fig.7 SOLO-TREC unmanned underwater vehicle and its thermoelectric power generation system
1.5 重力重心调整技术
大排量欠驱动运输UUV由于其运载的物资大小、形状、数量各不相同,满载航行时易出现重量分布不均匀、载荷配置不对称的情况,使重心的实际坐标与设计坐标产生偏差,在实际航行过程中,UUV不得频繁修正由于重心偏差造成的姿态不良现象,这不仅消耗了大量的能源,还对航行的安全性造成了严重的威胁,因此运输UUV必须具有一定的重心纠偏能力。目前,较为成熟的UUV重心调节方案主要分为改变重力大小和调整质量分布2种。
1)改变重力大小
通过控制压载水舱的吸、排水,调整压载水舱的重力进而调整UUV在水中的姿态,其不足之处在于压载水舱吸排水的同时会改变UUV的整体重力,破坏UUV在水中的中性浮力状态,改进方案是采用分散布置的多个独立压载水舱,如美国巴特尔公司研制的Proteus双模水下运载器(DMUV),如图8所示。其舱内设有6组环形布置的压载水舱,能在自动配平系统的指导下,自适应的调节各水舱的水位高度,同时调整UUV的自身重力及质量分布,补偿由于运载人数、货物重量不同、位置分布不合理造成的重心偏移,大大提高了航行稳定性。独立压载水舱不仅能用于运输UUV的重心调节,还广泛用于UUV进行无动力升沉、定深巡航、作业姿态调整等方面,具有重力调节范围大、可靠性高的特点,缺点在于控制系统复杂、空间占用较多,严重挤压了运输UUV的物资运载空间。
图8 美国Proteus DMUV 及内部环形压载水舱Fig.8 Proteus DMUV and internal annular ballast tank
2)调整质量分布
调整质量分布是指移动UUV内部重块位置,调整UUV的重心坐标。UUV内部重块的调整方向有沿Y轴运动和沿X轴运动2种。沿Y轴调整内部重块位置主要为了增加UUV的转向性能,如美国佛罗里达大西洋大学的学者Bo Li提出,在UUV内部设置沿Y轴运动的配重块并在UUV转向时移向转角内侧(见图9),产生绕x轴的力矩使UUV在转向时同时产生首摇和横摇,其原理类似于战斗机高速转向时飞行员同时操作方向舵和副翼,使转向角外侧机翼上抬,提升航行器转向性能[19]。

图9 可移动配重块Fig.9 Movable counterweight
沿X轴调整内部重块位置为了调整重心与浮心在X轴的投影点坐标,调整UUV俯仰力矩,多见于水下滑翔机及一些特种UUV,如中国计量大学设计的MSAUV,其具有多级可分离功能载荷舱,可根据需要随时分离、布放,如图10所示。载荷舱呈负浮力,分离后剩余部分重心与浮心在X轴上的投影不重合,产生力矩使UUV发生纵倾,此时电机驱动作为重块的电池舱前移,弥补重心偏移量,使UUV重回稳定状态。大排量运输UUV内部空间充足,能利用物资排列间隙容纳大行程的XY二轴重心调节滑台,通过移动多个配重单体的位置调节UUV重心,具有重心调节灵敏度高、对偏置载荷的适应性强的优势,缺点在于无法引入外部载荷,不能进行重力调节[20]。

图10 可分离功能载荷舱Fig.10 Separable function load module
运输UUV由于运载补给物资种类、数量不固定,尽管在进行物资装载时,后勤人员会严格按照预定的方案进行货物配装,但无法避免出现偶然误差,造成重力与浮力不相等、重心与浮心在X-Y平面投影不重合的现象,为实现安全、低耗航行带来困难,因此运输UUV的需同时具备重力调整、重心纠偏的功能。由于绝大多数货物配装都是按照预设方案执行,配装完成后实际重心坐标与设计情况相差较小,对运输UUV重心纠偏的能力要求将不会太大。运输UUV可综合分体式压载水舱重力调节范围大、重心纠偏滑台灵敏度高的特点,将二者相结合,形成高效能比的融合式重力重心调整技术。
2 亟待解决的问题与展望
不同于水面、陆地及空中无人运输平台,水下无人运输平台由于其工作环境及应用背景特殊性面临着一些特有或共性问题亟需解决,具体如下:
1)目前卫星通信几乎覆盖全球,且传输质量较高,然而无法在水下使用,因此水下运输平台目前需要解决的关键问题之一就是水下通信性能,需要从高效性、可靠性和安全性3个方面来考虑[21-22]。
2)为实现观察外部航行环境和诊断内部设备状态,水下运输平台需要具备多传感器测量技术和多传感器信息融合技术[23-24]。
3)为提高水下无人运输平台自主决策智能性,水下运输平台应具备对航线的自主规划和对航行行为的自主控制能力[25-28],尤其在恶劣海况下,如果通信中断,可自行采取一套应对动作,这就给研发自主控制系统提出了挑战。
