天气雷达天线运行状态在线检测初探
2021-12-11秦建峰姚丽琼
秦建峰,蔡 宏,姚丽琼
(1.武汉国家基本气象观测站,武汉 430040;2.湖北省气象信息与技术保障中心,武汉 430074)
0 引言
天气雷达天线的运行状态对雷达数据质量有着重要影响。目前中国气象局部署的各型号天气雷达尚未实现天线运行状态的在线检测和报警功能,研究雷达天线运行状态在线检测方法并将其付诸应用对于提升雷达性能在线监测能力和提高雷达数据质量具有积极意义。在天气雷达的运行保障中,只能离线检测天线定位误差,天线运行状态在线检测即在雷达运行中对天线的实际运转状况进行实时检测、异常识别和报警。周红根[1]等研究了包括天气雷达伺服控制性能的检测和标定技术;国内一些专家学者研究了雷达空间定位误差分析与诊断[2-4],天线性能及运行状态的机外仪表检测方法和手段[5-7],以及天伺系统的故障分析与处理[8-10];Rico-Ramirez[11]等利用高分辨率数字高程模型(分辨力不低于50 m)生成模拟地物回波场,用模拟地物回波场和实际地物回波场的交叉相关系数计算天线方位指向误差,方位偏差在-0.1°~-0.3°变化;Huuskonen[12]等在其他学者研究基础上提出了一种利用太阳辐射进行雷达天线指向误差在线检测的方法,给出了包含大气折射、大气衰减、空气湿度、太阳辐射功率等因子的计算方程,可计算出天线方位和仰角指向误差,实验表明仰角偏差在0.1°~0.15°变化,方位偏差变化较仰角偏差更大一些;Altube[13]等改进了太阳辐射功率识别和太阳辐射检测模型,使太阳辐射校准天线指向误差的方法也适用于中程雷达(80~150 km)。文章根据天气雷达天线运行控制的特点,提出了一种基于雷达运行日志的天线运行状态在线检测方法,详细介绍了检测方法的基本原理及应用中需要注意的问题。最后,利用武汉CINRAD/SA天气雷达运行日志数据对在线检测方法进行了应用检验。
1 天线运行状态参数
天气雷达的天线运行状态包括方位运行状态和俯仰运行状态,天线运行状态参数包括方位运行状态参数和俯仰运行状态参数[14,15]。
1.1 天线方位运行状态参数
天气雷达运行时,天线方位运行控制为速度模式,即对天线的运转速度进行控制,在各PPI扫描层控制天线以预定的速度作匀速运动,雷达观测模式不同则天线运转速度不同。运行中影响观测数据质量的在线检测参数有扫描层方位平均速度vi、方位零点误差σA0和方位角度野值个数Na及具体野值信息(Tn,Pn)。
1.1.1 扫描层方位平均速度vi
vi表示天线在每个PPI扫描层的平均速度,i表示PPI扫描层序号。图1为单个PPI扫描层天线方位角度—采样时间曲线示意图,A点为天线启动位置,A-B区段为方位角度随时间变化的曲线,C点为下一个扫描层启动位置。雷达在运行过程中,对天线方位角度实时采样,Pn和Tn分别表示方位角度值和采样时刻,P1和T1分别表示扫描启动后的第1个方位角度值和第1个采样时刻,PM和TM分别表示扫描层中的最后1个方位角度值和最后1个采样时刻。
采样间隔时间内的天线转速定义及计算见公式(1)。

(1)
扫描层的方位平均速度定义及计算见公式(2)。
(2)
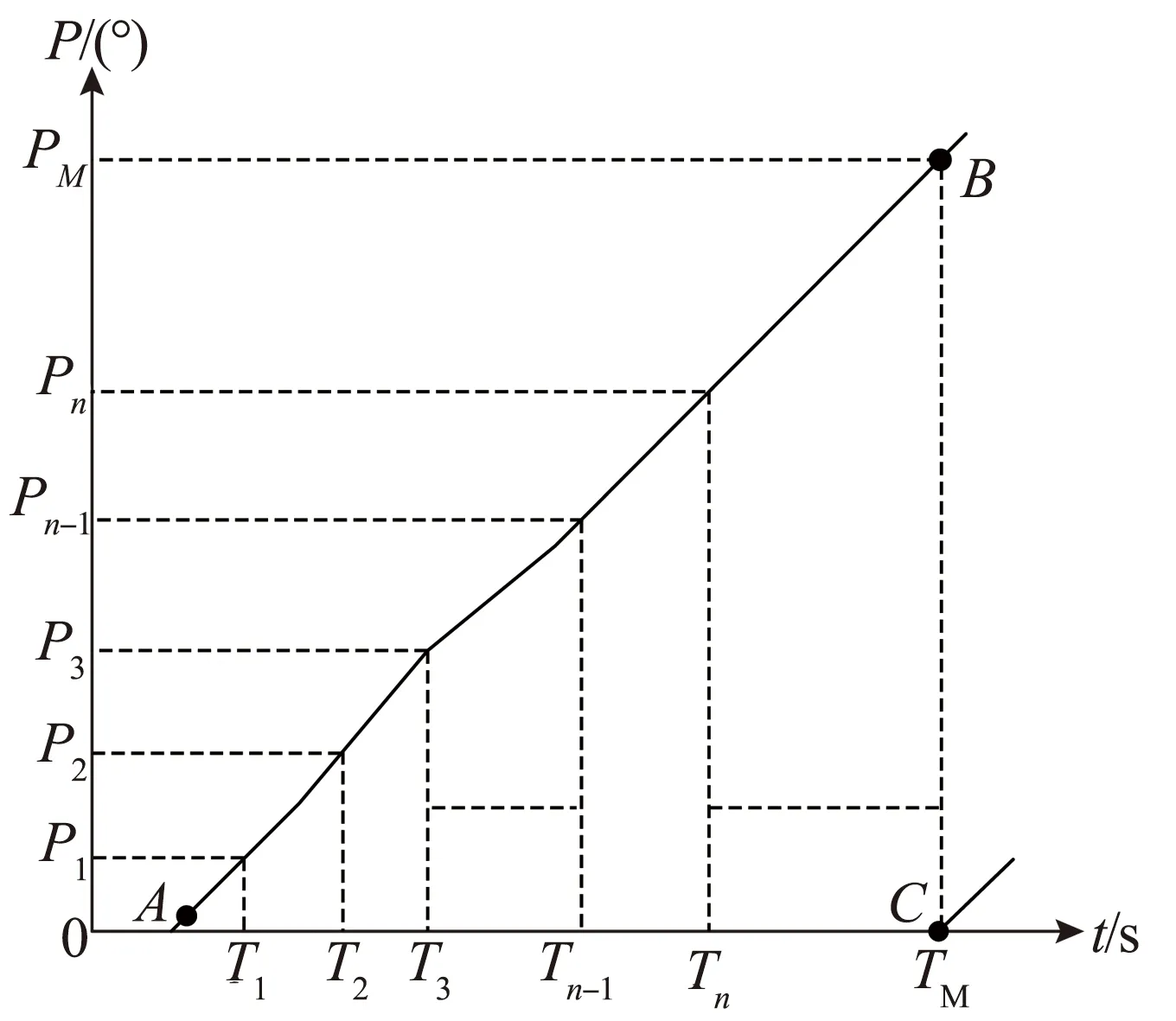
图1 单个扫描层天线方位角度-采样时间曲线示意图
1.1.2 方位零点误差σA0
σA0表示天线在方位零点的定位误差。方位为连续运转,只能确定天线方位零点位置的定位误差,以反映方位控制的绝对误差。雷达开始扫描时,天线停驻在方位零点附近位置,即图1中的A点,记方位角度为PA,根据公式(3)计算σA0。
σA0=PA
(3)
1.1.3 方位角野值个数Na及具体野值信息
Na表示天线在运转中方位角码值出现跳变的次数,以及各跳变值的具体信息(Tn,Pn),其中,n=1,2,……,Na;Tn为出现跳变角码值的采样时间;Pn为跳变角码值。Na及(Tn,Pn)可作为天线方位运行故障识别与报警参数。在天气雷达作体积扫描时,天线方位为顺时针单向圆周运转,天线方位运转状态包括停驻(抖动)、加速、减速和匀速。考虑到机械传动系统惯性,在足够短的采样时间间隔内,可认为相邻两个采样间隔时间内天线方位转速不会出现明显变化。所以,可根据前一个采样间隔时间内的方位转速预估下一个采样时刻方位角度值范围,作为方位角野值判断的条件。
1)当前采样时刻方位角度范围的确定
为了确定下一个采样时刻方位角度值范围,引入2个参量Δn和Δρ,设定当前采样时刻的方位角度范围为Pn∈(Pn-1,Pn-1+Δn)∪(Pn-1-Δρ,Pn-1+Δρ),n≥2,若超过此范围则判断Pn为方位角度野值。当n≥3,Δn定义及计算见公式(4),由公式(4)和公式(1)可得到公式(5),Δρ由公式(6)计算。
Δn=k1×Vn-2×(Tn-Tn-1)
(4)

(5)
式中,Δn为根据前一个采样间隔时间的方位转速Vn-2预估当前采样时刻Tn的方位角度Pn相对前一个采样时刻Tn-1的方位角度Pn-1的允许偏差;k1为比例系数,由天线转速、运转的稳定性和采样周期等因素决定。Δn是以适应天线动态特性为主的参量。
Δρ=k2×ρ
(6)
式中,Δρ为根据天线的定位准确度(由雷达设计所确定)确定的允许偏差;k2为比例系数,主要由天线运转的稳定性决定;ρ为方位定位准确度,目前各型号天气雷达均为0.1°。Δρ是以适应天线静态特性为主的参量。
2)通过Δn和Δρ确定角度允许偏差的说明
图2为天线方位转速对应方位角度允许偏差区间示意图。Vmax为Vn-2的最大值,由公式(4)可知Vn-2=0对应天线停驻状态。当天线处于停驻状态(静止、抖动)及|Vn-2|<|k2·ρ/(k1·tn-1)|的低速区(tn-1=Tn-Tn-1),Pn的范围由(Pn-1-Δρ,Pn-1+Δρ)确定,即图2中的区间S1;当天线处于运转(加速、匀速、减速)高速区|Vn-2|>|k2·ρ/(k1·tn-1)|,Pn的范围由(Pn-1,Pn-1+Δn)∪(Pn-1-Δρ,Pn-1+Δρ)确定,顺时针(上升)对应图2中的区间S2,逆时针(下降)对应图2中的区间S3;当天线由停驻状态向运转状态转换时,随着天线转速不断提高,Pn的范围开始由S1确定,继而由S2或S3确定。天线由运转状态向停驻状态转换时,则反之。
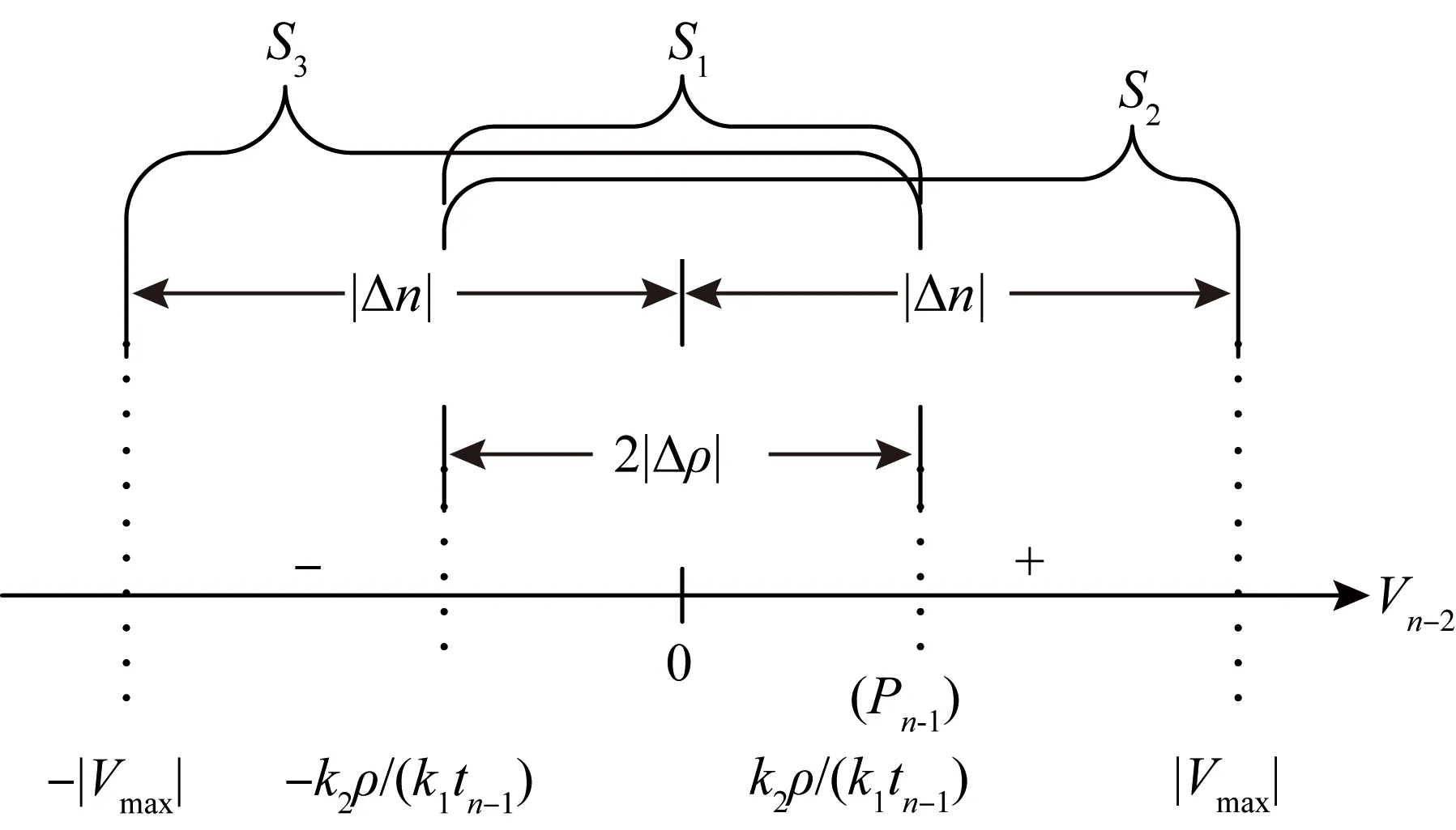
图2 天线方位转速对应方位角度允许偏差区间示意图
当n=1,第1个采样时刻的采样值P1不进行野值判断,且取Δ1=Δ2=0。在计算中野值应该剔除,即不参加下一个方位角度范围的计算。
1.2 天线俯仰运行状态参数
天气雷达运行时,天线的俯仰运行控制为位置模式,即控制天线精确定位,在各俯仰层控制天线准确到达不同的预定仰角,雷达观测模式不同则天线俯仰层数不同。运行中影响观测数据质量的在线检测参数有俯仰均方根误差σi、俯仰平均误差σE和俯仰角码野值个数Ne及具体野值信息(Tn,Pn)。
1.2.1 俯仰均方根误差σi
σi表示在不同俯仰层天线到达的实际仰角与预定仰角的均方根误差,i表示俯仰层序号,σi表示各俯仰层定位误差的离散情况。在天气雷达进行体积扫描时,天线俯仰停驻到预定的仰角位置后稳定不变或抖动,待方位扫描1圈或数圈后,再停驻到下一个仰角位置。图3为单个体扫周期天线仰角—采样时间曲线示意图,A点为天线启动位置,横线区段表示天线停驻位置,A-B区段为单个体扫周期仰角随时间变化曲线,C点为下个体扫周期的启动位置。σi由公式(7)计算。

(7)
式中,Ei为天线所停驻到的不同俯仰层的预定仰角值;N为Ei对应的实际仰角采样值个数。
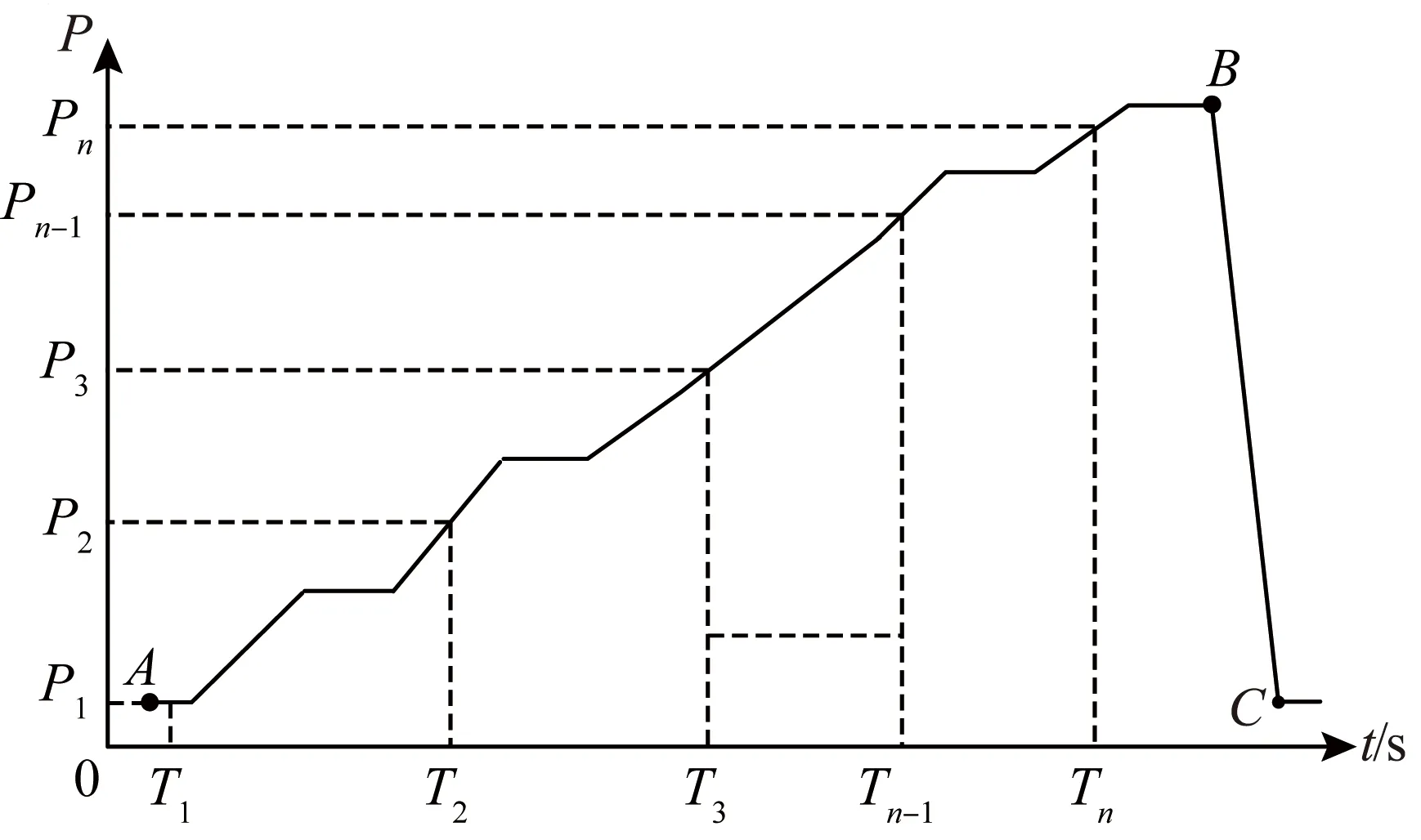
图3 单个体扫周期天线仰角-采样时间曲线示意图
1.2.2 俯仰平均误差σE
σE为所有σi的平均值,其大小反映俯仰运行误差的整体情况。σE由公式(8)计算。

(8)
式中,M为1个体扫周期内预定停驻的仰角个数。
1.2.3 仰角野值个数Ne及具体野值信息
Ne表示天线在运转中仰角码值出现跳变的次数,以及各跳变值的具体信息(Tn,Pn),其中,n=1,2,……,Ne;Tn为出现跳变角码值的采样时间;Pn为跳变角码值。Ne及(Tn,Pn)可作为天线俯仰运行故障识别与报警参数。在天气雷达进行体积扫描时,天线俯仰运转状态包括上升、停驻(抖动)、下降。仰角野值判断方法同方位角野值判断。
同理,为了确定下个采样时刻仰角范围,引入2个参量Δn和Δρ,设定当前采样时刻的仰角范围为Pn∈(Pn-1,Pn-1+Δn)∪(Pn-1-Δρ,Pn-1+Δρ),n≥2,若超过此范围则判断Pn为仰角野值。
天线俯仰运转状态与仰角允许偏差区间对应关系同天线方位。
当n=1,第1个采样时刻的采样值P1不进行野值判断,且取Δ1=Δ2=0。在计算中野值应该剔除,即不参加下一个仰角范围的计算。
2 需要注意的问题
2.1 角度过零处理
在天线运行状态在线检测方法的实现中,天线方位角和仰角存在过零问题,即天线在运转或停驻时,角度经过零点位置,则需要根据角度分布进行判别和角度转换处理。若公式(5)中Pn-2和Pn-1分别位于0°左、右,则需采用Pn-2-360转换为负值计算。区间(Pn-1,Pn-1+Δn)及(Pn-1-Δρ,Pn-1+Δρ)如果存在过零,也需要将0°左侧的角度转换为负值处理。比如,Pn-2=359.50°,Pn-1=0.50°,Δn=1.50°,Δρ=1.50°,则应将Pn-2转换为负值即Pn-2=-0.50°,则(Pn-1,Pn-1+Δn)及(Pn-1-Δρ,Pn-1+Δρ)为(0.50,2.00)及(-1.00,2.00)。
2.2 参数检测时间
应根据天气雷达的扫描特性确定各参数的检测时间。按照目前天气雷达广泛采用的体扫模式,方位零点误差σA0可在每次启动扫描时检测1次;扫描层方位平均速度vi、方位角野值个数Na及具体野值信息(Tn,Pn),俯仰均方根误差σi、俯仰平均误差σE、仰角野值个数Ne及具体野值信息(Tn,Pn),均可在每次体扫结束后检测1次。
2.3 天线角度2次采样
天线角度是雷达扫描径向数据的重要组成部分,需要以高速采样率(如采样周期为毫秒级)进行角度采样,以满足探测要求,所以天线角度数据量很大。在实践中可根据天线运转速度等特性,以合适的采样率对高速采样的角度数据进行2次采样,2次采样率应满足相邻的两个采样间隔时间内天线运转速度无明显变化。
2.4 PA的选值
公式(3)中PA选值应为方位旋转启动前方位角度的采样值,以反映天线停驻在方位零点位置的误差。
2.5 k1和k2值的确定
公式(4)、(5)、(6)中引入了比例系数k1和k2,以调节方位角和仰角允许误差,以不出现虚假角度野值为原则。k1和k2值的确定应考虑天线的控制特性,满足天线控制性能优良,天线运转稳定,过冲或抖动小,所以k1和k2值应取相对小值。反之,则k1和k2值应取相对大值。另外,由图2中允许偏差区间分界点|Vn-2|=|k2·ρ/(k1·tn-1)|可知,速度大小及采样间隔时间也决定了k1和k2的选取。根据经验,方位角和仰角出现野值时通常为大幅度角码跳变,所以k1和k2值取相对大值更便于实现。
3 天线运行状态在线检测方法检验
文章根据天气雷达天线运行控制的特点,给出了8项天线运行状态在线检测参数及参数值计算和异常判别方法(表1),利用武汉CINRAD/SA天气雷达的运行日志数据进行检验。
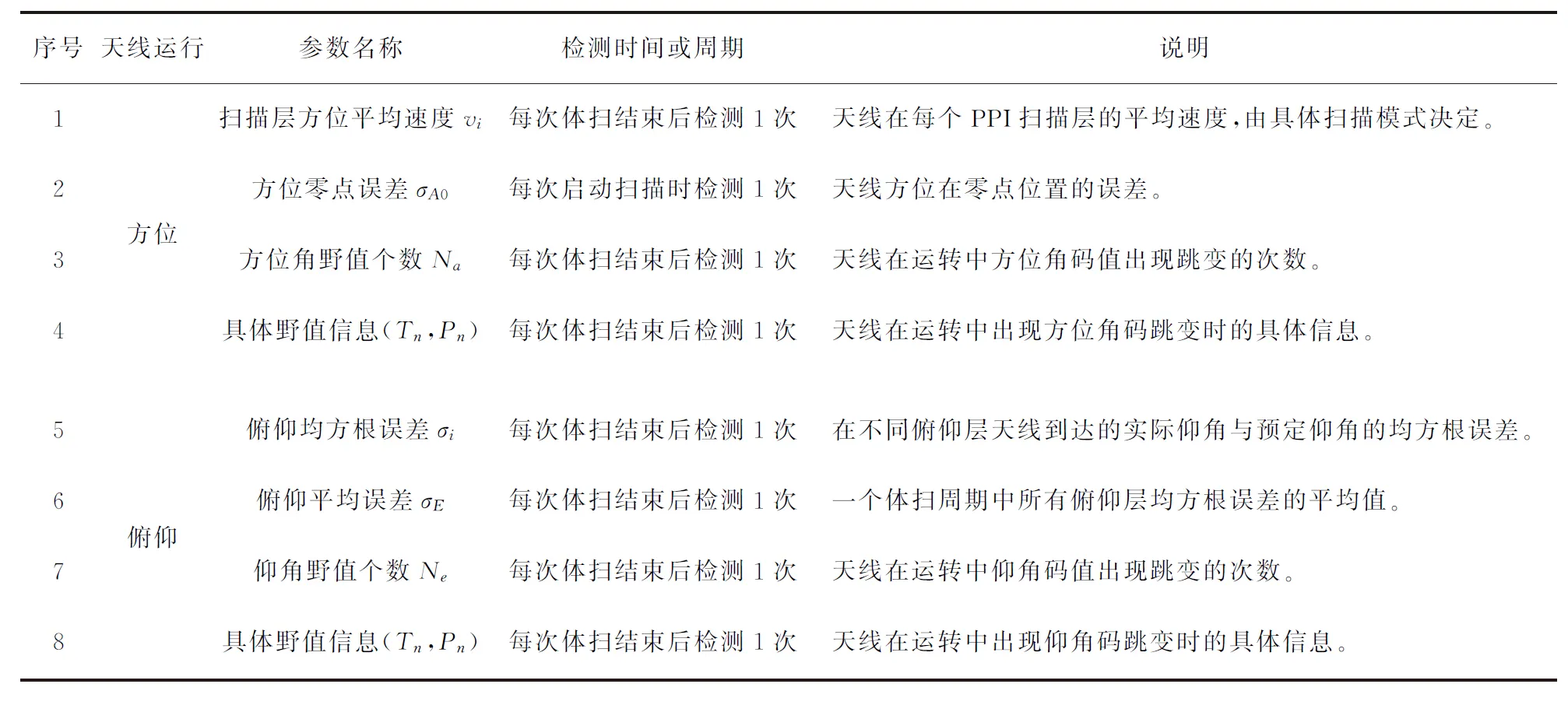
表1 天线运行状态在线检测参数
3.1 方位零点误差σA0
从日志数据中得到PA=0.04°,则σA0=0.04°。
3.2 扫描层方位平均速度vi
根据日志数据中的角度数据和采样时间可以计算出vi。方位结束角为方位起始角所在PPI扫描圈的下一个PPI扫描圈中的角度。
3.3 俯仰均方根误差σi和俯仰平均误差σE
根据日志数据中的角度数据和采样时间可以计算出σi和σE。
3.4 方位角和仰角野值判断
根据公式(5)和公式(6)计算得到Δn、Δρ、-Δρ和ΔPn(归零)曲线。由公式(5)可知,在采样间隔时间基本均匀的情况下,Δn主要由相邻采样时刻的角度差决定。所以方位角度允许误差控制曲线在于反应Δn随实际ΔPn的变化关系。因此,为了避免因方位角度范围大导致各曲线间位置关系的细节显示不清,对日志文件中的实际方位角度数据进行了归零处理,ΔPn(归零)=Pn-Pn-1,且ΔP1=0。从表1可见方位速度较大,则采样间隔时间取为0.20 s,k1=2.5,k2=6.0。采样时刻1、采样时刻2为天线停驻状态,采样时刻3天线已启动,前3个采样时刻允许误差由-Δρ和Δρ决定,随着天线转速不断增大至匀速,允许误差由Δn和Δρ共同决定。ΔPn(归零)始终处于允许误差范围内,说明未出现方位角野值。
根据公式(5)和公式(6)计算得到Δn、Δρ、-Δρ和ΔPn(归零)曲线。ΔPn(归零)曲线反映出天线俯仰从停驻到下降、停驻到上升、上升到停驻多个运行状态转换。采样间隔时间取0.25 s,k1=2.3,k2=5.0。天线在上升、下降运动状态的允许误差主要由Δn决定,停驻状态的允许误差主要由Δρ决定。
4 结束语
文章根据天气雷达天线运行控制的特点,给出了8项天线运行状态在线检测参数及参数值计算和异常判别方法。利用武汉CINRAD/SA天气雷达运行日志数据对在线检测方法进行了应用检验,检验结果表明在线检测方法可准确量化表征天气雷达天线运行状态,且便于在各型号天气雷达中实施。
