基于迭代校正的视频图像亚像素角点检测仿真
2021-12-10黄言言
明 月,黄言言,刘 罡
(1.湖北工业大学,湖北武汉 430068;2.湖北工业大学工业设计学院,湖北武汉 430068;3.湖北工业大学计算机学院,湖北武汉 430068)
1 引言
视频图像中存在大量场景信息,利用角点能够有效描述视频图像内物体空间结构与特征,通过准确的角点信息可准确识别、定位视频图像内关键点[1],因此角点检测逐渐成为学者主流研究对象,普遍应用在目标识别、影像拼接与视觉处理等领域[2-3],相关人员作出大量研究。
文献[4]提出基于Harris特征点和DWT-SVD的图像盲水印算法,通过稳定Harris特征点分析角点特征区域,利用一次小波分解方法获取特征区域低频子带,分解角点奇异值,利用加权方法实现角点最奇异值检测,但该方法不具备尺度与仿射固定特性,因此存在严重不确定性。文献[5]提出基于分块SURF特征提取的图像目标跟踪算法,利用分块并行方法对角点重叠区域进行分块,对冗余特征数据进行消冗处理,通过角点模板自适应抗遮挡功能去除离散点,实现视频图像角点检测,该方法解决了尺度固定问题,但具有极值和冗余检测问题,且定位的角点仅为像素级。
为解决上述问题,提出基于迭代校正的视频图像亚像素角点检测方法,该方法在视频图像成像过程中,将校正图像与高斯核函数卷积形成多尺度空间,解决了摄像机镜头的光学偏差与装配误差导致径向畸变问题,径向畸变将导致角点坐标偏移,实现视频图像亚像素角点检测。实验结果表明:该方法能够高效准确的检测角点信息,且检测结果偏移量较小,具有较好的实际应用价值。
2 视频图像亚像素角点检测
2.1 摄像机镜头参数优化
针对视频图像成像过程中摄像机镜头径向畸变问题,通过多次拍摄与逐级迭代优化镜头参数(等效焦距、镜头成像中心、旋转向量和平移向量等)[6]。选定以固定参照物,在镜头距离参照物15cm、10cm和8cm条件下,各拍摄20张参照物图像,根据距离与畸变程度将60张图像分为远距离小畸变图像(一类图像),中距离较大畸变图像(二类图像)和近距离大畸变图像(三类图像)[7]。获取若干组镜头初始参数,利用这些初始参数校正一类图像,一类图像校正效果较
2.2 图像畸变校正
用sd和su分别表示畸变半径和最佳半径,两者间的相关性由畸变模型决定。式(1)描述sd和su之间的相关性

(1)
式中,hn表示径向畸变系数。
利用式(1)能够确定畸变图像与校正图像坐标的映射关系,基于此对畸变图像实施校正,即可使畸变图像还原[8]。在进行像素点空间坐标变换时采用逆向映射法,用(li,ji)和(0,0)分别表示校正图像像素坐标,以(li,ji)为原始坐标,(0,0)为左上角坐标。以(0,0)为初始点,分别向x方向和y方向移动一个像素,移动至右下角的点结束,计算畸变图像内相应坐标,利用像素点灰度插值法获取校正图像I(x,y)。此过程公式描述如下
(x,y,z)T=D-1(li,ji)T
(2)

(3)

(4)
2.3 亚像素角点检测
利用高斯函数对校正图像I(x,y)进行卷积处理,构建多尺度空间[9],分别在校正图像与多尺度空间图像内提取角点。
确定多尺度空间内全部角点,用k表示其中某角点,以其为中心向校正图像投影,用k′表示校正图像上相应的投影点。在校正图像内设定圆形投影区域[10],该区域的中心和半径分别为k′和r,以该区域中全部角点构建角点集群。用V表示角点k的响应函数值,对其实施变换获取新的响应函数值,用A描述,其表达式如下

(5)

依据A选取角点集群中响应函数值在(A∓θ)之间的角点。将选取的角点数量划分成三类:①选取的角点数量为0,表示该集群中存在有效角点;②选取角点数量为1,表示该点即为有效角点;③选取角点数量超过1,此时应依照角点贡献程度[11-12],通过坐标加权平均法,以A为权处理选取的各角点,完成角点亚像素定位。此过程公式描述如下

(6)



(7)
对式(7)求解得到

(8)
3 实验分析
为验证提出的基于迭代校正的视频图像亚像素角点检测方法的有效性,采用所提法在MATLAB软件内进行仿真,仿真平台为Intel Core i7-4720HQ,CPU和内存分别为3.20GHz和16GB。实验对象来源与我国某大学视频图像库,共选取50幅视频图像,其中包含标准结构化视频图像和景物视频图像。
3.1 亚像素角点检测仿真
考虑到亚像素角点检测的实际应用性,采用所提方法进行仿真时,检测对象为景物视频图像。
设定摄像机镜头参数:x方向与y方向的等效焦距分别为429.197和429.414,镜头成像中心为(912.993,951.687)理想镜头视场角为1,旋转向量和平移向量分别为(1.674,2.771,0.327)和(-99.723,-309.856,87.955)。
利用所提方法检测校正后的图像亚像素角点,结果如图1所示。

图1 亚像素检测结果
图1内,标记为红圈的点为所提方法获取检测结果,由此可知验证了所提方法的有效性。
3.2 尺度不变性仿真
在尺度参数有所差异的情况下,检测到的角点未出现改变即角点尺度不变性。采用所提方法、文献[4]方法与文献[5]方法在尺度参数有所差异的情况下进行亚像素角点检测,结果如图2所示。为清晰体现对比结果,检错过程中采用标准结构化视频图像。

图2 亚像素角点检测结果
分析图2可知,在尺度参数存在明显差异的条件下,所提方法检测到的亚像素较短数量均显著低于其它两种检测方法,这表明所提方法的检测错误的概率较低,具有较好的角点尺度不变性。
采用客观评价方法评价三种亚像素角点检测方法的尺度不变性,通常采用的评价指标为角点重复率。在尺度参数有所差异的情况下检测的重复角点数量与原图角点数量的百分比即为角点重复率,计算过程为

(9)
其中,m和N分别表示重复角点数量与原图角点数量。
在尺度参数有所差异的情况下,分别采用上述三种检测方法检测全部实验对象的亚像素角点,确定各实验对象的角点重复率,对比三种检测方法角点重复率的平均值,结果如图3所示。
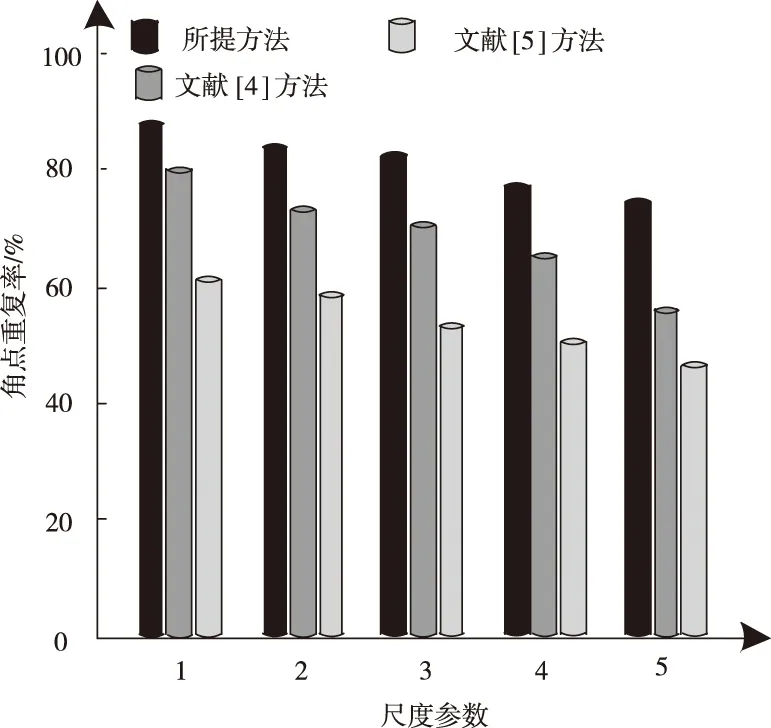
图3 不同尺度参数下角点重复率均值对比
分析图3得到,随着尺度参数的逐渐提升,三种检测方法的角点重复率均值均呈现出不同幅度的下降趋势,说明在尺度参数有所差异的情况下,任何亚像素角点检测方法的角点检测结果均会发生变化。在尺度参数逐渐提升的过程中,所提方法得到的角点重复率始终高于另外两种对比方法。三种检测方法中,文献[4]方法的角点重复率降幅接近30%,当尺度参数达到最大值时,角点重复率在55%左右,这说明尺度的差异造成文献[4]方法检测出较多不同角点,说明该方法的尺度不变性较差,不利于亚像素角点定位。相较于文献[4]方法,所提方法与文献[5]方法的角点重复率下降趋势基本一致。在同一尺度参数下,所提方法的角点重读率始终高于文献[5]方法,当尺度参数达到最大值时,所提方法角点重复率在75%以上,而文献[5]方法角点重读率低于50%。仿真结果说明在尺度参数有所差异的情况下,所提方法能检测出更稳定的角点,鲁棒性能更高,具有更好的尺度不变性。
3.3 亚像素角点检测精度仿真
参考各检测方法的角点重复率和角点检测效果,排除噪声干扰情况,利用所提方法检测图3内实验对象的亚像素角点,分析检测方法的检测结果与实际亚像素角点坐标之间的偏移量,部分亚像素角点对比结果如表1所示。利用空间曲面模型拟合角点附近响应函数值分布,以响应函数值最高的像点位置为实际亚像素角点坐标,实际亚像素角点与检测到的亚像素角点间距离为偏移量。
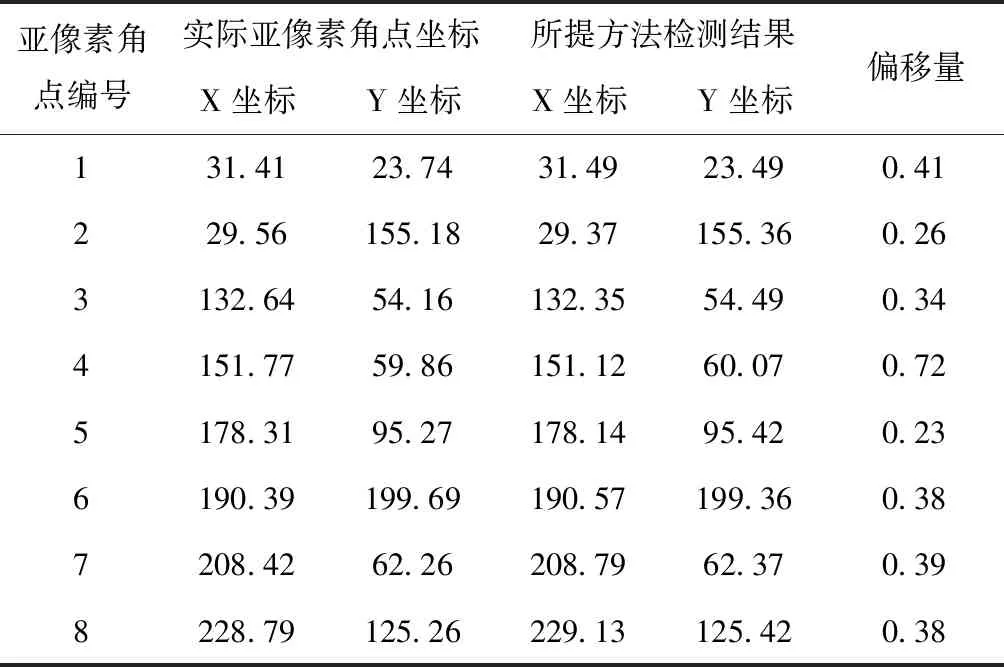
表1 所提方法检测结果偏移量
分析表1中的检测坐标数据得到,所提检测方法检测结果中偏移量基本控制在一个像素内,所提方法检测结果中偏移量值最低的角点均为编号5的角点,偏移量分别为0.23和0.27;检测结果中偏移量值最高的角点均为编号4的角点,偏移量分别为0.72和1.43。仿真结果表明所提方法的检测结果与实际亚像素角点坐标较接近,检测精度较好。
3.4 时空性能仿真
三种不同检测方法的时空性能对比结果如表2和表3所示。

表2 不同检测方法时间性能对比
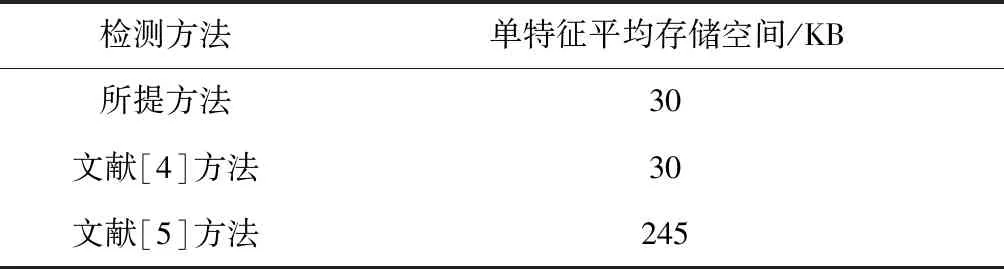
表3 不同检测方法存储空间对比
分析表2和表3能够得到,所提方法在检测视频图像亚像素角点时时间效率显著优于其它两种对比方法,每帧视频图像检测的平均时间在97ms左右,与其它两种检测方法相比分别降低347ms和822ms左右,且所提方法在检测过程中,时间波动趋势较为平缓。所提方法单特征平均存储空间与文献[4]方法一致,均为30B左右,显著低于文献[5]方法。仿真结果表明:所提方法在检测视频图像亚像素角点时具有较高的时空性能优势。
4 结论
为满足视频图像角点的准确检测。所提提出基于迭代校正的视频图像亚像素检测方法,通过迭代修正方法校正视频图像采集过程中摄像机镜头导致的图像畸变,将校正图像与高斯核函数卷积形成多尺度空间,以尺度空间角点为中心投影至校正图像构建角点集群,实现亚像素角点检测。仿真结果显示:所提方法可有效校正畸变图像并检测亚像素角点;且所提方法可提升亚像素角点的尺度不变形与检测精度。在后续研究中继续优化所提方法的检测效率,为视频图像全景拼接、目标检索与定位、重建三维目标模型等提供稳定的亚像素角点。
