基于PSO优化的永磁直线同步电机混沌滑模控制
2021-12-10黄俊豪杨俊华陈海峰蔡浩然
黄俊豪,杨俊华,陈海峰,蔡浩然
(1.广东工业大学自动化学院,广东 广州 510006;2.广州市市政工程设计研究总院有限公司,广东 广州 510000)
1 引言
永磁直线同步电机(permanent magnet linear synchronous machine,PMLSM)利用动子直线运动切割磁场发电,没有中间传动装置,结构简单,转换效率提高[1-3],已应用于波浪发电系统等相关研究当中[4-5]。永磁同步直线电机运行过程中,特定参数条件下,其电流、转速及转矩会产生短时剧烈振荡及不规则噪声,进入控制性能极不稳定的混沌运行状态[6-8],对发电系统正常运行及并网产生不良影响。PMLSM是一个强耦合复杂机电系统,海洋工作环境不确定性大,PMLSM波浪发电系统输入不稳定,更易进入混沌状态[9],需研究其混沌特性及稳定控制方法。
通过设计优化定子铁芯、绕组,转子永磁体,永磁同步电机在低速运行时可以取得较好的混沌控制效果[10],但电机设计通用性较低。文献[11]改进耦合电机系统的混沌模型,基于三对角结构矩阵稳定性理论提出一种高速混沌控制器,实现了发电机系统混沌控制,并可通过调整控制参数值缩短瞬态时间,消除混沌,但如何确定控制参数值是一个亟需解决的问题。为抑制电机混沌,文献[12]将永磁同步风电系统转为类洛伦兹模型,提出自抗扰控制(ADRC)方案,可降低对精准数学模型的依赖,保证转子速度快速跟踪期望值,解决参数不确定问题,对直线电机有借鉴意义。文献[13]将电机模型转化为Brunovsky形式,应用扩展状态观测器优化滑模混沌控制,提高系统应对未知状态和不确定性能力,鲁棒性增强,但坐标变换过程复杂。为抑制永磁同步电动机运行过程中的混沌现象,文献[14]构造PMSM矢量操控系统,提出了非奇异快速终端滑模混沌控制方法,减弱了对速度传感器的依赖性。文献[15]提出一种自适应滑模控制策略,使PMLSM在参数不确定条件下可脱离混沌。滑模控制是实现混沌控制的有效方法,但控制参数改变对控制效果影响较大,需解决最佳控制参数寻优问题,智能算法正当其时。针对风力机最大功率捕获问题,文献[16]应用粒子群算法优化滑模控制器参数。
通过建立PMLSM数学模型,运用状态反馈,获得d-q轴解耦数学模型,分析电机混沌现象。为实现电机混沌脱离及稳定控制,设计滑模控制方案。利用BP神经网络拟合逼近能力,研究不同参数滑模控制效果。结合粒子群优化(PSO)与滑模控制率,寻找最优控制参数,使控制率更优,实现PMLSM更快脱离混沌并达稳定。
2 PMLSM数学模型
2.1 PMLSM混沌状态方程
PMLSM的结构如图1示。与永磁同步电机相似,初级固定,次级动子做直线运动,永磁体交替分布在运动路径上。通入三相正弦交流电后,产生行波磁场,磁场方向同动子运动方向相反。
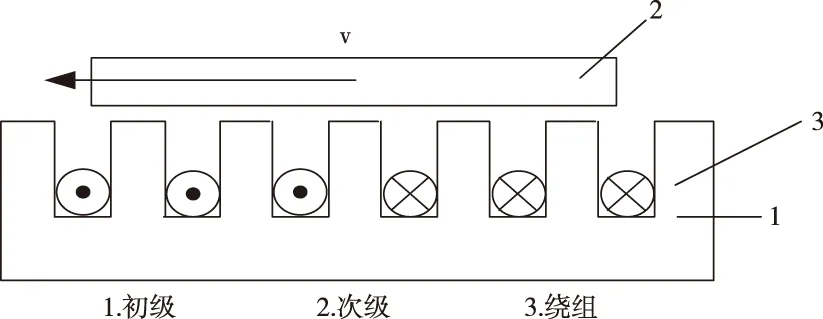
图1 永磁直线电机结构图
为建立PMLSM数学模型,假定铁芯不饱和,动子上无阻尼绕组,不计谐波与涡流损耗[17]。考虑边缘效应,通过派克变换及放射变换[15],电机混沌数学模型为

(1)

忽略式(1)中的上标,可得简化表达式

(2)
2.2 PMLSM的解耦数学模型
由式(2)可见,d-q轴电压电流相互耦合,难以直接进行控制,利用状态反馈解耦,构造解耦矩阵,解耦式(2)[18]。

图2 状态反馈解耦系统


(4)

3 PMLSM混沌分析
3.1 混沌识别
混沌识别是混沌分析中一个关键步骤。Lyapunov指数是目前混沌判别中一种最常用的有效方法。对于混沌系统来说,初值极细微改变,都可能会使相关运动轨迹逐渐呈现指数级增长分离,导致系统进入混沌状态。Lyapunov指数能更准确反映混沌运动轨迹的平均发散指数率。当混沌系统Lyapunov指数小于0时,系统相体积呈缩小趋势,渐进趋于稳定状态;当该指数大于0时,系统相体积则呈现增大趋势,运动轨迹逐渐分离,并最终进入混沌状态。因此,当系统Lyapunov指数至少出现一个正值时,系统便会进入混沌状态,呈现一定区域范围内系统运动轨迹的有界性与随机性[19-20]。计算系统最大Lyapunov指数,判断其正负值,即能判断系统是否进入混沌状态。
Wolf算法,可追踪计算两点的运动轨迹及其距离变化值Δd,若Δd随时间不断增大,则系统会进入混沌状态,计算方法为[21]

(5)
其中ε为积分步长,d0为运动两点初始距离。
3.2 PMLSM混沌分析
根据PMLSM混沌数学模型,进行仿真建模,当参数σ和γ取不同值时,计算最大Lyapunov指数,结果如图3示。

图3 PMLSM最大Lyapunov指数图
分析图3,最大Lyapunov指数随σ和γ变化而变化,σ影响相对更大一些。当σ逐渐减小至5左右时,最大Lyapunov指数穿过零平面变为负值,系统脱离混沌状态。
PMLSM混沌状态下的d-q电流与转速变化如图4示,并由此可知,进入混沌状态下的电机电流、转速会在一定区域范围内无序地振荡。

图4 PMLSM的混沌响应
4 PMLSM的滑模控制律设计及优化
4.1 滑模控制率设计
滑模变结构控制受系统参数影响,但不受外界波动因素影响,鲁棒性强。


(6)
求导可得

(7)

(8)
对式(10)求导得

(9)
其中c1为控制参数,大于零。
针对式(11)构造Lyapunov函数
(10)
求导得

(11)
设计控制率

(12)
式中k1>0,η1>0。



(13)
对上式求导,得

(14)
构造Lyapunov函数
(15)
求导得

(16)
设计控制率b(t)

(17)
式中k2>0,η2>0。

至此,完成PMLSM系统控制率设计。
4.2 BP神经网络拟合控制参数全局效果
式(14)与式(19)给出的控制率中,共有6个可控参数c1、k1、η1、c2、k2、η2,研究可知,η1、η2对控制率影响较小,但其余参数的细微变化,都会影响系统响应时间及超调量等。
BP神经网络学习逼近能力强大,可拟合任一非线性函数,选用常见的三层网络,预测滑模控制率控制参数,结果如图5示。

图5 PMLSM响应时间图

图6 PMLSM超调量图
由图5、6可知,控制参数的细微变化会对系统响应时间与超调量造成较大影响,存在多个局部最优值。也就是说,传统经验法可确定局部最优控制参数,但无法确定全局最优控制参数。
4.3 PSO优化滑模控制参数
粒子群算法(PSO)搜索速度快,可迅速找出最优解,已被广泛应用于工业控制领域优化[22]。粒子能够依据个体与全体历史最优适应值不断迭代,来更新自身速度位置。PSO位置与速度关系

(18)
其中,ω为惯性权重,c1、c2是学习速率,r为一个随机数字,xi、vi是第i个粒子位置及运动速度,pbest、gbest分别是粒子、粒子群的历史最优位置。PSO工作流程如图7示。

图7 PSO工作流程图
针对优化目标控制率,要求系统响应时间尽可能短、超调量尽可能小。根据式(4),PMLSM已实现d-q轴解耦,d、q轴可独立控制,于是设置适应值函数:

(19)
式中,Td、Tq、Tv、Od、Oq、Ov分别为d、q轴电流与转速v的响应时间及超调量。
5 仿真验证
利用PSO对滑模控制率控制参数优化适应值曲线如图8示。将优化后的控制参数输入到系统控制率中,结果如图9示。

图8 最优适应值曲线
由图9可知,所提方案可使电机脱离混沌状态并达到给定稳态目标值,PSO参数优化后的滑模控制率耗时更短,超调小,控制效果更好。

图9 滑模控制算法及优化后滑模控制算法下的PMLSM动态响应
6 结论
通过建立PMLSM解耦数学模型,证明电机运行过程中可能会进入混沌状态,为此设计滑模控制器,实现混沌控制。利用BP神经网络拟合滑模控制参数,利用PSO算法优化控制率,确定最优控制参数。仿真结果表明,滑模控制策略能够实现PMLSM混沌脱离与稳定控制,经PSO优化后的滑模控制率,响应时间及超调量小,控制效果更佳,鲁棒性提高。
