电液耦合转向系统建模与控制方法研究
2021-12-10施国标
施国标,周 倩,王 帅
(北京理工大学机械与车辆学院,北京 海淀 100081)
1 引言
液压助力转向系统(HPS)在大型车辆上得到广泛运用,但是存在助力比固定、高速路感差、能源利用效率低等不足[1]。电动助力转向系统(EPS)虽然能通过设置适当的助力特性曲线克服以上不足,但其提供的助力较小,不能满足大型车助力需求[2]。为了保证应用于大型车的转向系统具备随速助力、自动回正、阻尼补偿等功能,一种结合HPS和EPS的电液耦合助力转向(EHCS)系统为解决以上问题贡献了新方案。
国外的Williams[3]最早提出EHCS结构上的创新设想并申请了专利,国内的施国标等[4]针对该系统在商用车转向性能、辅助驾驶和无人驾驶方面的优异性提出了新的设想。在此之前对商用车转向系统的研究主要集中在电控液压助力转向(EHPS)系统上[5-6]。此后,吉林大学的吕程盛[7]基于EHCS系统,设计了基本助力控制、转向回正与阻尼控制策略,采用传统PID进行电机助力电流的跟踪。高恪等[8]考虑商用车载荷变化对驾驶员转向手力的影响提出了EHCS系统补偿控制策略,并通过台架试验验证该控制策略的正确性。赵伟强等[9]为了避免安装了EHCS系统的商用车在高速行驶时发生失稳,通过控制转向力矩使车辆时刻行驶在稳定区内。目前国内外有关EHCS的研究较少,多停留在系统级性能的验证上,缺乏相应的理论建模及控制策略研究。如何针对性地考虑EHCS系统的非线性和滞后性从而实现系统精确控制,有待进一步研究。
本文针对该新型转向系统设计了一种双层控制器以实现转向器助力和回正功能,并采用模糊控制策略进行电机电流跟踪以提高控制精度。最终通过建立复杂的EHCS系统模型实现联合仿真,验证控制策略的有效性。
2 助力特性曲线的确定
转向系统如图1所示,转向助力由液压助力和电动助力系统共同提供。电动助力和驾驶员手力共同作用使转阀扭杆发生扭转,决定液压助力大小。在电动助力、液压助力和转向手力三者的共同作用下,车辆克服转向阻力进行转向。

图1 EHCS系统原理图
想要转向系统提供适当的转向助力使驾驶员获得良好的转向手感,需要合理分配液压助力和电动助力的大小。
2.1 整车转向助力需求
轮胎在原地转向时产生的转向阻力最大,根据原地转向半经验公式[10],获得原地转向阻力Mr与地面摩擦系数μ、轮胎气压P、轮胎垂直负荷FZ之间的关系
(1)
车辆行驶过程中,轮胎与地面的运动为边滚边滑,分析轮胎与地面的相互作用比较困难,转向阻力计算复杂。本文基于式(1)获得的最大转向阻力,结合转向阻力随前轮转角和车速的变化趋势,获得整车转向阻力曲线如图2所示。不同车型、不同道路环境的车辆,转向阻力不同,实际工程设计过程中,可以通过实车试验获得较为准确的转向阻力曲线。

图2 整车转向阻力曲线
在无转向助力的情况下,单靠驾驶员手力克服上述车辆转向阻力实现车辆转向困难。考虑驾驶员理想转向手力为0-10Nm,装配了EHCS的车辆需要合理分配电液助力以减轻驾驶员的转向操作强度,满足整车转向助力需求。
2.2 液压助力特性曲线
在实际生产过程中,常通过改变转阀扭杆刚度和油泵流量调节液压助力的大小:扭杆刚度越小,流量越大,液压助力越大。
设置液压助力大小时,考虑转向手力和电动助力同时作用在转阀扭杆输入端,将其看作整体,匹配液压转向系统的扭杆刚度和油泵流量,使液压助力占所需转向力的80%以上,提供大部分的转向助力。该分配既利用液压助力系统能提供大助力的优点,又避免助力电机体积过大难安装布置。最终获得液压助力特性曲线如图3所示。

图3 液压助力特性曲线
2.3 电动助力特性曲线
液压系统结构参数确定以后,液压助力大小只与输入端扭矩有关。为使EHCS系统能实现随速助力,电动助力大小应与车速、转向手力有关,根据文献提出的车速系数确定方法[11],确定电动助力特性曲线如图4所示。该助力特性曲线对不同车型和不同路感要求的车辆不具有通用性,实际工程中在完成整个系统设计后需要进行特征车速的路感试验,并根据实际情况对车速系数进行修正。

图4 电机助力特性曲线
3 控制器的设计
为保证系统转向性能和操纵稳定性,本文针对EHCS提出一种双层控制策略。上层控制策略包括模式判断、助力控制和回正控制:模式判断根据驾驶员的输入和实际车辆运动状态,判断工作模式,在满足条件时启动回正控制;助力控制获得驾驶员手力和车速,根据事先设定的电动助力特性曲线输出理想助力电流;回正控制通过设计回正补偿电流,在回正模式时对助力电流进行修正从而改善车辆低速回正效果。下层控制策略考虑EHCS系统的非线性及多变量耦合,提出自适应模糊PID控制方法,保证电机对理想电流的跟踪特性及对不同车速的适应性,提高转向系统操纵稳定性。
3.1 上层控制策略
3.1.1 模型判断控制
转向助力和回正是EHCS系统基本操纵性能:转向时,要求系统能提供适当助力使得转向轻便;转向结束后,需要提供回正力矩使方向盘快速准确地回到中间位置。进行助力控制和回正控制前,控制器需根据驾驶员手力以及车辆当前运动状态进行模式判断,判断规则如图5所示。

图5 回正控制触发规则
a、d为可调阈值,时间T的初始值为0,控制器时刻监测驾驶员输入力矩Th、方向盘转角θ及其变化率θ′。测得方向盘力矩小于阈值a,则对方向盘转角及转角变化率的乘积进行判断:若乘积小于0,则维持助力模式Flag=0直至T超过时间阈值d,之后取Flag=1;若乘积大于0,则仅采用助力模式Flag=0,时间T设为0。(Flag=1表示控制器处于回正控制状态,Flag=0表示控制器未处于回正控制状态)
3.1.2 助力控制
系统存在惯性和阻尼,转矩传感器实际测得的驾驶员转矩和转向助力到达循环球转向器带动前轮转向之间存在一定的相位延迟,且随着转向盘转向速度增加,延迟问题更严重。为了提高EHCS控制的快速响应性,提高跟踪性能,本文对转矩信号进行超前补偿处理,采用的相位校正模块为如式2所示[12]。
(2)
3.1.3 回正控制
当车辆低速行驶时,轮胎与地面的摩擦力矩较大,轮胎本身的阻尼特性以及转向系统内部存在的摩擦和阻尼导致方向盘无法完全回正,存在残留方向盘转角和横摆角速度,影响车辆的直线行驶性能。为使方向盘能快速准确地回到中间位置,需要设计回正控制。回正控制根据方向盘转角以及车速获得回正电流,并将其作为补偿电流输入电机,电机输出回正力矩,控制车辆主动回正,消除残留方向盘转角。本文采用的回正特性曲线如图6所示。

图6 回正特性曲线
3.2 下层控制策略
EHCS系统具有低阻尼、非线性等性质,在不同车速下需要的PID控制器参数不同[13]:高速时考虑转向超调和系统振动,需要增大微分系数;低速时防止转向不足,需要增大比例系数。传统PID控制器参数固定,难以达到满意的控制效果,因此在下层控制策略中采用模糊PID控制,设计相应的模糊规则实时调节PID参数,保证系统的操纵稳定性。
模糊PID控制输入目标电流和实际电流的差值及其变化率,输出电机控制电压。取定义到闭区间[-6,6]上的七个模糊子集,即NB(负大)、NM(负中)、NS(负小)、Z(零)、PS(正小)、PM(正中)、PB(正大),描述控制器的输入输出的大小。量化因子和比例因子通过实车实验进行调整。模糊规则见表1、表2和表3,其中Δkp、Δki、Δkd分别是比例系数kp、积分系数ki和微分系数kd的调节量。

表1 Δkp.的模糊规则

表2 Δki.的模糊规则

表3 Δkd.的模糊规则
4 联合仿真及结果分析
为验证该转向系统及其控制策略的可行性,本文提出整体系统框架如图7所示,主要包括以下几部分:转向系统模型、驾驶员模型、车辆动力学模型和采用了双层控制策略的控制器模型。其中驾驶员模型采用经典PID控制模型[14],车辆动力学模型选用Trucksim软件中的汽车模型。想要根据控制器输出的电机电压,经过转向系统最终输出前轮转角,转向系统模型需要包括电机模型、转向管柱模型、液压助力系统模型、循环球及转向横拉杆模型。

图7 EHCS控制策略整体结构图
4.1 转向系统模型
4.1.1 电机模型
电机数学模型如下:

(3)

(4)
Tm=KaI
(5)
Ta=im·Km(θm-imθs)
(6)
式中,Tm为电机转矩,Km是电机扭转刚度,θm为电机转角,Jm表示电机转动惯量,Cm代表电机阻尼系数,U为电机电压,I为电机电流,R为电机电阻,L为电机电感,Kb为电机反电动势系数,Ka为电机转矩系数,Ta为电机经过减速器作用在管柱上的转矩,im为齿轮齿条减速器传动比,θs是第一根扭杆底端的转角。
4.1.2 转向管柱模型
模型进行适当简化后:

(7)
Ts=Ks(θh-θs)
(8)
式中,Th为转向盘输入转矩,θh为转向盘转角,Jh为转向盘转动惯量,Ch为转向盘阻尼系数,KS为第一根扭杆刚性系数,TS为转向手力经过转向管柱输入到液压助力系统转阀扭杆输入端的扭矩。
4.1.3 液压助力系统模型
采用恒流转阀式液压系统,推导出液压助力公式为

(9)
FL=PLAp
(10)

(11)

(12)
ΔθL=(Ts+Ta)/KL
(13)
式中,PL表示液压缸活塞两段压力差,FL为液压助力,Qs为进油口流量,y表示活塞位移,Cd为节流孔流量系数,ρ为油液密度,Ap代表液压缸活塞有效面积,A1、A2、A3、A4分别为各转阀开口面积,W1和L1分别代表阀口预开间隙轴向长度和预开间隙长度,W2和L2分别代表短切口的轴向长和度周向长,r为阀芯半径,ΔθL代表转阀扭杆转动角度,KL表示转阀扭杆刚度。
4.1.4 循环球式转向器及转向拉杆模型
液压助力、电动助力、驾驶员手力共同作用在循环球转向器上克服转向系统转向阻力,使车辆前轮产生转角:

(14)
式中,m为循环球转向器等效质量,c为转向器等效阻尼,k为转向器等效弹性系数,Ff为转向器内部摩擦力,Fr为转向回正阻力,r′为螺杆半径,α为螺杆螺旋滚道导程角,ρk为螺杆螺母副换算摩擦角,Tr为转向阻力通过车辆在Trucksim中仿真获得,x为液压缸活塞位移。左右前轮转角的推导公式如下所示

(15)
式中,l1为转向摇臂长度,l3为转向节臂长度,rw为循环球转向器齿扇半径。
4.2 仿真结果分析
助力电机电流跟踪效果如图8所示。结果表明:采用模糊PID算法的控制器具有较好的电流跟踪特性,满足控制器对不同车速的适应性要求。且相较于传统PID算法,本文提出的模糊PID改善了助力电机的电流跟随特性。

图8 目标电流跟踪效果
使方向盘转角发生0—500°—0—-500°—0的变化,获得所需驾驶员转向手力曲线如图11所示。方向盘转角为0—500°、0—-500°时,系统处于转向助力状态:曲线a和c为30km/h车速下装备EHCS和HPS系统的车辆转向所需驾驶员手力,结果表明相较于HPS,EHCS系统轻便性更好;曲线b和c表明了EHCS系统随速助力特性,随车速增加转向所需驾驶员手力增加,保证了转向路感。方向盘转角在500°—0、-500°—0变化时,转向系统处于回正状态,由于控制器提供回正力,回正过程所需的驾驶员手力小于转向过程。

图9 助力效果图
图10表示了未加回正电流补偿时前轮的回正情况,及加上回正电流补偿时前轮的回正情况。仿真结果表明,在回正控制下,转向系统回正性能得到改善,方向盘可以快速返回到中间位置。

图10 回正效果图
5 台架试验
搭建EHCS硬件在环试验台如图11所示。
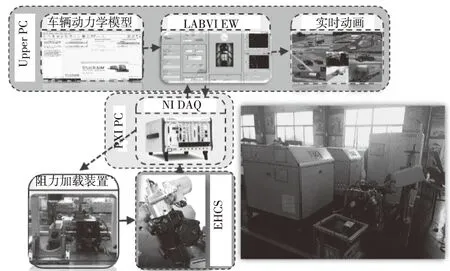
图11 硬件在环试验台
进行随速助力试验,试验结果分别如图12所示。

图12 助力效果图
试验结果也验证了控制策略的有效性。
6 结论
基于以上工作,得到以下结论:设计的模糊PID控制策略在高频转向工况下具有更好的助力跟踪效果;电动助力特性曲线与液压助力特性曲线匹配良好,最终获得的总助力曲线满足转向系统低速转向轻便,高速转向有路感的要求;在提出的多层级控制策略下,EHCS相较于EPS和HPS系统可以实现商用车良好的助力特性和主动回正性能,并拥有更好的转向操纵手感。
