基于曲线拟合的可控电抗器电压自动控制系统
2021-12-09姜为元杨玉姣唐小龙
姜为元, 杨玉姣, 唐小龙
(中国能源建设集团辽宁电力勘测设计院有限公司, 辽宁 沈阳 110179)
0 引言
电抗器是常用的电力电磁控制设备,在谐波滤波、电压控制、无功补偿、负载均衡、电动机控制等领域,电抗器均发挥着重要的作用,也成为不可或缺的电气安全控制和电能质量保障的重要设备。随着电抗器容量逐渐增加,电抗器的运行环境复杂度日益增加,电抗器对用电配电网络的反馈效应也日益增加,所以对电抗器进行单独管理的自动化智能化设备逐渐发展起来。赵国生等[1]对一种新型混合型磁控电抗器的控制特性进行了研究,并在电测领域提出了控制方案。郭哲等[2]对空心并联电抗器的匝间故障的3个阶段特性进行了分析研究,并对电抗器综合保护系统提出了解决方案。张慧英等[3]对变压器配套可控电抗器的控制特性进行了研究,并在复杂谐波环境下提出了一套控制方案。
曲线拟合算法是当前大数据技术(Big Data)中最常用的前瞻数据分析方法,通过曲线拟合算法,可以根据线性离散数据或高维度离散数据,对数据的后续发展方向做出短周期判断。该算法支持下,可以对可控电抗器的运行环境特别是谐波环境做出前瞻性的预测,并充分调动电抗器配套的自动投切系统做出相应动作,实现电抗器的配套自动投切系统对有前瞻性的短周期数据做出预判和预动作,对提升电抗器稳定性有积极意义。钟浩等[4]使用局部曲线拟合算法对用电系统电压失稳做出预判并控制电压管理回路做出自动投切动作,有效优化了复杂运行环境下的用电回路电压控制管理系统。陈波等[5]通过曲线拟合算法识别了用电回路中不良电压的发生预兆,并实现对用电回路的电压自动投切控制。
上述研究中发现,曲线拟合算法应用到电压自动控制系统的研究一般较早,近5年罕见相关研究。而电抗器的系统升级研究在近3年内快速发展。所以,当前技术需求下,电抗器电压自动控制与曲线拟合算法进行联合研究,会成为当前的一个重点研究方向。本文将二者进行整合研究,以期提出一套可行方案。
1 电抗器电压控制回路的等效电路
电抗器的电压控制器一般采用前置一个变频调压电源控制器提供电源优化,后置一个电容分压器提供电压后置保护,复杂系统下,在变频调压电源控制与电抗器之间,设置一个励磁变压器用于电抗器的电压管理。常规的电抗器控制器控制系统如图1所示。

图1 电抗器一般控制模型示意图
图中,电源输入到变频调压电源后,经过一个励磁变压器对电抗器电压进行充分整理,且在电抗器后端布置电容分压器对电抗器的输出杂波进行过滤。深度优化的电抗器控制系统,会对电抗器的阻、容、抗特性曲线带来一定程度变化,而且会对其伏安特性曲线带来一定程度畸变,但如果将电抗器控制系统与电抗器综合特性(电抗器和电抗器控制器的U-I特性曲线、Q-P特性曲线等)进行测量并形成特征关系,则可将该系统等效视为一个典型电抗器系统。故电抗器控制系统本身做出的自动投切动作并不影响电气系统的整体运行稳定性。因为本文重点考察电抗器电压自动管理系统的运行特征,所以并不研究该系统对电抗器的阻、容、抗特性和伏安特性带来的畸变,而是对该系统的数据产生、数据采集、数据治理、数据决策过程进行分析。
所以,在系统实际运行中,应采集的电压电流数据如表1所示。

表1 数据采集需求表
系统设置2个核心数据表,数据表1为UAB、IA的持续数据,数据间隔为5 s,每小时数据量为720条,每条长度除2个4字节Double数据外,另包括一个日期时间型变量(Datetime)4字节,一个长整型变量(Long)4字节,每条有效数据量长度为16字节,每小时有效数据量长度为11.52k字节。数据间隔为15 s,另包括一个日期时间型变量(Datetime)4字节,一个长整型变量(Long)4字节,每小时数据量240条,每条有效数据量长度为36字节,每小时数据量为8.64k字节。故上述数据的总数据需求为每小时20.16k字节,每天数据量为483.84k字节。该数据处理需求较小,一般嵌入式系统可以在电抗器嵌入式设备中完成数据存储和数据处理。
2 曲线拟合算法在电抗器电压控制中的应用
电气系统的电压数据具有很强的时域特征,所以,有必要采用时域分析的方式对曲线拟合算法进行分析。
2.1 一阶时域分析原理
一阶系统的时域分析功能设计中,使用面对函数的编程方法,将一阶时域分析的复杂运算函数进行综合编程并添加进系统工具包中,用来创建方便用户进行试验仿真应用的组函数包,如表2所示。

表2 一阶时域分析相关函数表
在线性系统的时间响应机制下,研究模型在典型控制信号的时间响应过程,即是二阶系统的时域分析过程。在仿真测试选单中提供的稳态测试选单中,提供在典型控制信号输入作用下,当t→∞时,模型系统提供输出电压、电流、温度等表现形式,叫做系统的稳态响应。也是此功能对时域分析的稳态响应过程进行仿真控制,如图2所示。

图2 一般控制系统时域响应波形图
从图2中可以看到一般的电气控制系统在古典控制理论下的时域响应周期参数定义,其中td为系统响应c(t)上升到0.5倍目标值时占用的时间周期被称为延迟周期;tr为系统响应c(t)第一次达到目标值时占用的时间周期被称作上升周期;tp为系统响应c(t)达到峰值时占用的时间周期被称作峰值周期;ts为系统响应c(t)稳定进入到调节目标+0.05-0.02周期的最初时间周期被称作稳态周期。
对于一般控制系统来说,ts及之前所有周期尽可能短且最高峰值尽可能小,但也有一个量化控制目标Mp,如式(1)。
(1)
控制过程输出的c(t)峰值超出稳态值的部分与稳态值之间的比值用百分比表示,即为量化控制目标Mp。同时,影响到c(∞)稳态输出量与目标调控量之间误差的,还有斜坡控制、加速度控制、阻尼控制等诸多控制因素,这些因素都可以在时域分析中得到体现。
2.2 一阶系统及跃阶响应分析原理
首先可以构建一个一阶系统的响应模型,参照表2,可得式(2)。
(2)
其控制过程可简化,如图3所示。

图3 一阶系统跃阶响应控制过程简化图
图3中,除表2中相应计算式外,还有式(3)。
(3)
由式(3)可得式(4)。
(4)
在此基础上进行一阶系统的时域分析和单位跃阶分析,参考表2,得到对应关系表如表3所示。

表3 单位跃阶分析的时间周期对应关系表
单位脉冲响应中,除表3中计算式外,还应包括式(5)。
(5)
即有式(6)。
(6)
由式(3)-式(6)可得一般状态下的斜率响应曲线图和脉冲响应曲线图,如图4、图5所示。
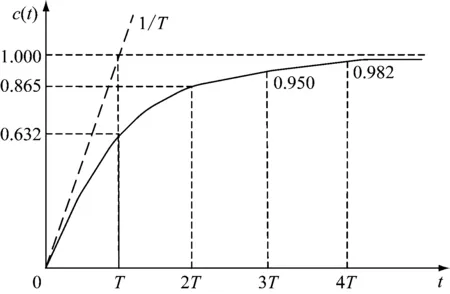
图4 一般状态响应曲线图(斜率)

图5 一般状态响应曲线图(脉冲)
图4中,初始斜率1/T状态下,当系统调整理论值达到目标状态1.000倍的理论时间周期被看做T,此时系统因为系统的斜率响应特性,一般只能达到理论状态的0.632倍左右,而使用T对t轴进行等分,可以得到4个状态点,这4个状态点的理论调整结果分别约为目标值的0.632倍,0.865倍,0.950倍,0.982倍。不同系统参数下这4个调整值可能有所浮动,但基本遵照该一般模式的调整目标发生变化。
图5中,初始斜率1/T下,当系统调整理论值达到0时的时间周期被看做T,此时因为系统的脉冲响应特性,一般只能达到理论状态的0.368/T左右,使用T值对t轴进行等分,可以得到T、2T、3T、4T4个状态值,这4个状态值的理论调整结果逐渐接近理论目标值0,分别为0.368/T,0.135/T,0.050/T,0.018/T。不同系统参数下这4个调整值可能有所浮动,但基本遵照该一般模式的调整目标发生变化。
2.3 时域分析的二阶响应原理
对式(2)和跃阶公式进行二阶分析,可以得到式(7)。
(7)
即有式(8)。
(8)

对表2一阶时域分析常用函数表进行补充,如表4所示。

表4 二阶时域分析常用函数表
其中,阻尼系数ξ的不同表达可以给上述式带来不同的性质,比如ξ在(-∞,0]区间,[0,1)区间,[1,+∞)区间等,均可以表达出不同的阻尼性质和极点性质。分别可以定义为欠阻尼状态、临界阻尼状态和过阻尼状态,可以解出上述方程的共轭复数根、相等负实数根、不等负实数根等。
参照表4,可以得到二阶分析的跃阶响应算式为式(9)。
(9)
2.4 曲线拟合算法
在角度坐标系下,频域坐标系的拟合曲线可以写作式(10)。
(10)
在时域坐标系下,时域坐标系的拟合曲线可以写作式(11)。
(11)
其中,Ru为上残余项;Rd为下残余项。
式(10)与式(11)在描述的数学过程完全相同,只因为坐标系不同(时域空间及频域空间)而出现了不同的表现形式,所以,在实际对式(1)-式(9)的曲线拟合算法中,使用上述二者进行曲线拟合,均可以得到显著的结果。
3 基于嵌入式系统的曲线拟合电压控制系统设计方案
SINLINX SINa31s开发板,采用全志ARM31架构(ARM7双核),拥有1 GByte动态存储(DDR3 1 333 MHz),4 GByte EMMC外部程序存储器,提供AXP2.2AT-Flash外部数据存储通道,同时提供基于PCI-E总线的196 pin数据杜邦针扩展。使用该开发板对本文需求的智能化系统进行嵌入式开发,可以基本满足基于24H数据的系统功能支持。
结合表1,该系统的输入线路共有7条,每条占用2 pin杜邦针,输入数据经过嵌入式系统初步数字化后,存入MySQL数据库中,供系统的时域分析模块和曲线拟合模块进行数据挖掘。经过挖掘的数据,需要分别向变频调压电源模块和励磁变压器模块提供控制数据,同时还应控制本文系统的进出口断路器的控制数据。变频调压电源模块的控制信号线采用并行方式,提供16 pin数据线,接入该系统PLC系统的输入单元中,并对该输入单元进行控制指令的解模糊分解;励磁变压器模块采用并行方式,提供8 pin数据线,接入该系统PLC系统的输入单元中,并对该输入单元进行控制指令的解模糊分解;前后端的断路器综合控制器预留2 pin,分别接收2 pin信号的串行控制数据,用于必要时对该电抗器单元进行保护性切除,如表5所示。
由表5可知,系统总共使用42 pin的外部扩展杜邦针通道,占总计196 pin外部拓展杜邦针通道的21.43%,系统冗余达到78.57%。因为本文使用的SINLINX SINa31s开发板程序存储器达到4 GByte,其中安装安卓操作系统占用1.24 GByte,相关应用程序(MySQL、Python、Java等)及搭建运行环境占用1.87 GByte,总程序占用空间达到3.11 GByte,仍有较大空间,完全可以满足小于1 MByte的24 h数据存储空间,所以,本文系统未连接额外的外部T-Flash存储器进行数据管理。其PaaS架构如图6所示。
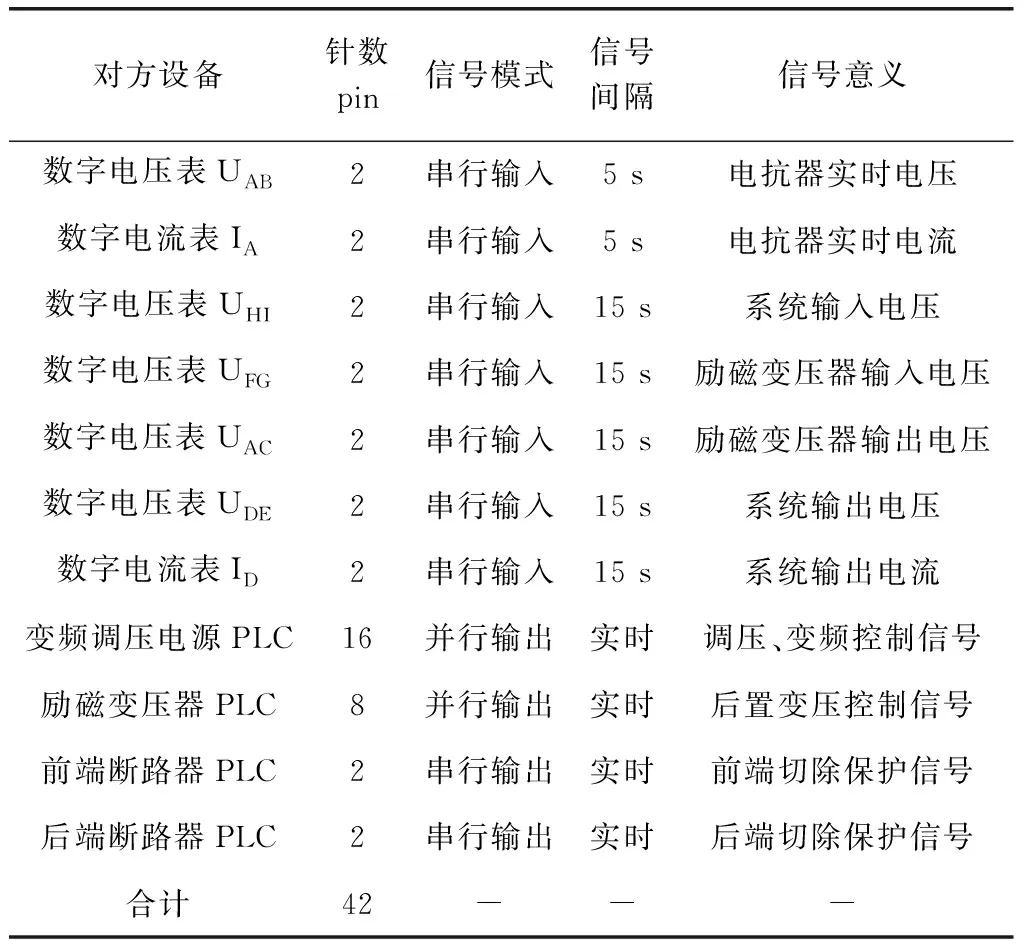
表5 外部PCI-E总线的利用方案表
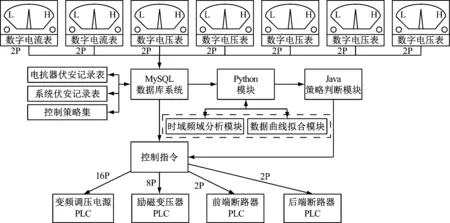
图6 本文嵌入式系统PaaS架构示意图
部署该系统后,采用黑箱测试法对系统运行前后进行数据对比,测试用电电压为6.3 kV,测试环境为码头用重型装载机高压正反转运载电动机控制用电抗器组的综合控制系统,系统启停较为频繁,之前电抗器运行压力较大。测试时间为24H,系统运转状态为正常工况运转。所得结果如表6所示。
从表6测试结果中可以看到,使用综合电压管理系统后,电抗器的超电压和欠电压现象得到了有效改善,系统核心温度也显著降低,该系统取得了一定的应用效果。

表6 系统黑箱测试结果表
4 总结
本文采用曲线拟合算法,对电抗器及其自动投切管理系统进行基于嵌入式系统的管理算法优化,使系统的数据分析算法具有一定的前瞻性,以确保自动投切系统的动作更加及时有效。使用基于ARM31架构的嵌入式系统,在安卓系统下配置了MySQL、Python、Java等开发工具,对职能电表采集的7个采集点的电压电流数据,结合时域分析和频域分析基础上的曲线拟合数据,同时将控制指令解模糊过程交给受控系统PLC处理,实现了基于嵌入式系统的全离线自动化控制。且该控制方案在实际运行测试中表现较为积极。
