复杂网络动力学与智能控制
2021-12-09关治洪陈关荣
胡 滨,关治洪,谢 侃,陈关荣
(1. 华中科技大学 人工智能与自动化学院,湖北 武汉 430074;2. 广东工业大学 自动化学院,广东 广州 510006;3. 香港城市大学 电机工程系,香港 999077)
浩瀚宇宙中,我们不知道的有些什么?《Science》杂志曾专辑刊发了125个有待解决的科学问题[1]。其中有关于智能与计算的问题,例如意识的生物学基础是什么?如何存储和检索记忆?合作行为如何演变?如何从生物大数据中提取宏观信息?传统计算的局限性是什么?等等。回答这些问题需要更多的科学探索和理论分析,而这些问题的解决有助于加深我们对认知、智能与计算的理解,帮助我们重新定义和设计人工智能(Artificial Intelligence,AI)。本文围绕智能如何产生,其动力学行为如何演化、如何控制等问题,简要概述复杂网络、动力学系统与智能控制等跨学科的研究内涵(见图1),旨在回顾适应模型的复杂性(如节点系统和连边动力学)、环境的复杂性(如未知数据、不确定连接、外界扰动)和任务的复杂性(如稳定或协同前提下的经济性、脆弱性、鲁棒性)催生的智能控制方法,重点介绍复杂网络动力学、神经科学和智能控制等交叉学科研究,展示智能控制实施中牵制机制(Pinning Mechanism)、混杂特性(Hybrid Characteristics)与自适应方法(Adaptive Method)的重要性。

图1 本文综述主题:融合复杂网络与动力学系统,构建智能控制方法,以解决复杂场景下的稳定、协同等问题Fig.1 The theme of this survey: Integrating complex networks and dynamic systems to build intelligent control, aiming at solving problems of stability and cooperation in various complex scenarios
1950年,艾伦·图灵(Alan Turing)提出了“图灵测试”,大意是如果人类无法区分机器和人,则可认为机器具有“智能”。从微观世界到宏观世界,过去20年人们见证了智能科学与技术的巨大进展[2-4]。这些进步离不开神经科学领域的发现与分析。神经科学的研究导致大脑结构与功能以及智能方面的许多重要发现[5],曾催生了多项诺贝尔奖和图灵奖。西班牙组织学家Camillo Golgi和意大利生理学家Santiago Ramon y Cajal获得了1906年诺贝尔生理学或医学奖,以嘉奖他们“对整个大脑神经元大规模的观察、准确的描述和精确的分类”,为脑神经系统的复杂网络结构提供了证据。英国神经生物学家John C.Eccles、Alan L. Hodgkin和Andrew F. Huxley共享了1963年诺贝尔生理学或医学奖,因为他们“发现了神经细胞膜外围和中央部分的激发和抑制离子机制”,揭示了神经元产生动作电位(或称脉冲)动力学过程。由于深度神经网络的创新和AI领域的突破,Yoshua Bengio、Geoffrey Hinton和Yann LeCun获得了2018年图灵奖。Marvin Minsky在1960年写道:“当然,没有公认的智能理论”[6]。理解和刻画人类认知的神经活动基础是神经科学的研究目标之一,也可能是类脑智能的终极挑战[7]。
1948年,诺伯特·维纳(Norbert Wiener)提出了控制论(Cybernetics)的两个基本概念——信息与反馈。相比经典的PID (Proportional-Integral-Differential)反馈控制,智能控制的研究对象和应用载体更加复杂,如具有不确定性或强非线性模型、节点系统耦合作用或反馈环节含未知数据等。为适应被控对象、环境及任务的复杂性,产生了许多以复杂网络动力学为基础的智能控制方法。从复杂网络角度,诞生了复杂脑网络(Complex Brain Network)和网络神经科学,为调控认知行为提供了分析证据[8-10]。从动力学系统角度,介观尺度(约100 μm)的神经群落呈现异步的群集动力学,支持感知和决策等行为[11-13]。鸟类、蚂蚁和鱼群等动物群体通过协作可以涌现群集智能效应,完成个体无法完成的复杂任务,如觅食、迁徙、围猎等。通过模拟动物的群集效应和适应机器智能的需求,产生了多智能体系统(Multi-agent System),其中智能体一般是机器,或者有人参与[14]。智能控制是多智能体通过分工合作达到协同目标的关键技术。针对协同动力学行为如何控制这一问题,智能控制与复杂网络动力学的交叉研究产生了一系列可行的解决方案,如分布式控制和优化、牵制控制、混杂控制、自适应控制等[15-16]。
本文后续部分如下:第1节回顾复杂网络、动力学系统、神经科学和智能控制的基本概念、原理与方法;第2节综述智能控制领域的若干问题与研究进展;第3节讨论智能控制在脑科学与机器行为学中的潜在应用,最后给出总结与展望。
1 基本概念、原理与方法
本节回顾复杂网络、动力学系统、神经科学以及智能控制的有关概念和原理。
1.1 复杂网络:一门新兴学科
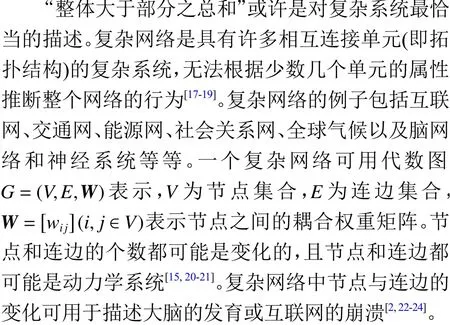
复杂网络的实证研究表明,复杂网络的基本原理包括拓扑特征和群集动力学。主要网络拓扑特征包括度分布、聚类系数、路径长度、模块化、社团结构和层级结构等[15]。图2展示了几类典型复杂网络拓扑结构的关系和演化。由图2(a)可知,在规则网络与随机网络之间重新布线(改变连边概率p),发现当p取中间值时,会得到新类型的小世界网络。重新布线过程中,保持节点和连边的个数不变。图2(b)显示了实施重新布线过程,网络的平均最短路径长度L(p)和聚类系数C(p)随连边概率p的变化趋势。图2(b)中,当概率p取值在0.01附近,路径长度L(p)小而聚类系数C(p)大;这两种性态的共存展现了小世界网络的主要特征,构成了从规则网络到随机网络的过渡。同步和涌现等群集动力学有助于维持网络的功能,如生物体发育和对抗网络攻击[18-19,25-26]。Erdös-Rényi随机网络[27]考虑了随机拓扑图相对于边的数量如何变化。Watts-Strogatz小世界网络[28]具有明显较短路径长度和较大聚类系数,而Barási-Albert无标度网络[29]揭示了幂律度分布。这些典型的网络模型被用于描述或重构实际系统,包括脑网络和社交网络;其中,系统的功能(如发育、学习和免疫)可以通过网络控制和优化来增强[8,17,24]。

图2 典型复杂网络[28]Fig.2 Typical complex networks[28]
从实际应用角度,复杂网络的研究还涉及故障、攻击或病毒(发生在节点或连边上)引起网络结构变化对整体行为的影响[23]。如何揭示结构脑网络与功能脑网络之间的关联性得到了脑科学和复杂网络领域的关注[2]。在社会团体中,人们往往遵循“物以类聚、人以群分”的规则去参与活动,而这种宏观的社会行为可以通过“Nonlinearity+Networks”的范式来建模和调控[17,30]。在皮层网络中,每个神经元大约有10 000个突触连接。在认知过程中,介观尺度的神经元群体动力学如何影响认知结果?对于阿尔茨海默病(Alzheimer’s Disease,AD)患者,跨尺度的神经元动力学呈现什么样的网络动力学?关于这些认知问题,神经科学尤其是与复杂网络的跨学科研究,有希望能给出一些合理的解答[2,10]。
1.2 动力学系统

力学系统常常被用来描述一组随时间变化的状态变量,例如位置、速度或加速度。推而广之,动力学系统的模型可用如下高维一阶微分方程表示[31]。

若在连续时间区间上考察状态,则这个系统是一个连续动力学系统,如式(1)所示;若只是在一系列不连续的时间序列上考察系统的状态,则得到一个离散动力学系统;若一个系统综合了连续时间区间、离散时间序列上两类状态演化特征,则称之为混杂动力学系统[16,32-33]。若f函数是关于状态x的非线性函数,则得到了一个非线性系统;否则为线性系统。若式(1)的左边含高阶微分项,则得到了高阶微分系统。
动力学系统被广泛用于许多自然系统和人造系统的建模。例如,Lorenz系统是一类由3个变量构成的非线性动力学系统,结合混沌分析能够描述气候变化的复杂动力学特征[31,34];Hodgkin-Huxley模型是一类含强非线性的动力学系统,能够复现神经元产生动作电位的过程[11,35];欧拉−拉格朗日运动方程是一类含二阶微分的非线性动力学系统,可以描述机械臂的运动[36-37]。由于拓扑结构的作用,脑网络与社会团体等实际系统呈现复杂网络动力学特性,可建模为复杂动态网络[20,30]。此外,动力学系统的控制及优化为构建具有自适应能力的无人(机器)系统提供了可行的解决方案[38-39]。
1.3 神经科学:智能的源泉
“Can machines think?”(机器能思考吗?)是图灵关于早期人工智能的思考。神经科学的研究涵盖了神经生物学、生理学、认知科学,是研究脑与智能的重要手段,当前AI技术的突破正是基于神经科学和机器学习的交叉成果[4,40]。为适应脑与智能研究的需求,神经科学的对象不仅包括脑区、群落、神经元与突触,还包括微观的离子分子机构等多尺度单元[11]。运用复杂网络动力学工具,分析复杂脑功能网络中的结构与功能关系,为治疗癫痫、AD等脑疾病提供有用的参考[2,41-42]。
对脑神经结构的探索可追溯到1906年前后,Santiago Ramon y Cajal绘制出各类小脑神经元,Camillo Golgi发明了神经组织染色方法,为现代生物成像技术提供了重要基础。近期研究同样关注如何构建可解释的神经群落动力学模型,原因是越来越多的证据显示,介观尺度的神经群落是搭建微观神经活动与宏观系统功能的媒介[43-45]。
计算神经科学和网络神经科学主要是从网络拓扑规律和动力学演化角度,解释生物脑如何工作,并通过计算和动力学方法分析神经活动与认知智能之间的关联[46]。受到外界刺激,神经元会产生脉冲信号(Spike),并传递给突触后神经元;依据Hebb定律,突触前后神经元的相关放电活动会诱发突触的长期可塑性(也称突触动力学),即突触变化可持续几秒钟、几小时,甚至更长时间。突触可塑性被认为是记忆学习等认知行为的神经基础[11]。在大脑中,神经元不仅与其他神经元通讯,还与外界环境交互,表现出自适应特性[47]。神经编码则关注如何将外界刺激映射为脉冲序列,以及如何从脉冲序列解码出刺激内容,而动力学系统和统计分析是其主要研究方法[22,48]。神经系统的自适应和编码特性为设计智能控制带来重要启示。
1.4 智能控制
“智能”一词通常与目标导向(Goal Directed)的行为有关,比如预测、优化和自适应[49]。综合结构和功能,当前最先进的深度学习依赖深度神经网络,借鉴视觉皮质网络的层级机构,并依赖误差反向传播机制(Back Propagation)[3]。当调控宏观的社会行为(如疾病、观点的传播)时,控制单个节点系统或者控制节点之间的连边都具有一定的可行性[21,30]。研究表明,可以补偿系统脆弱性或未知约束的往往是复杂的控制协议,而不是简单的反馈控制[36-38,50-51]。
复杂网络动力学,特别是与神经科学的交叉学科研究,为智能控制技术带来了新的研究思路。许多工程或自然系统由协同行为来维持特定功能[2],如电网保持频率同步[52],神经网络产生有节律的脉冲序列以便完成分类任务[53]。网络环境下,分布式控制是实现协同的关键技术[14]。网络控制方法可用于刺激秀丽线虫的神经网络,帮助预测其运动行为[9]。自适应控制和编码技术对于重新设计神经回路很有用,因为它使神经系统能够完成复杂的学习任务[47]。
控制大型网络中的所有或多数节点是不切实际的,这使得牵制(Pinning)机制成为研究脑和智能的可行选择[18]。混杂模糊(Hybrid Fuzzy)控制能保证忆阻神经网络的同步性能[54]。相对时钟驱动(Timeclocked)控制系统,事件触发(Event-driven)系统具有较低通信频率、较少控制更新等优点[32],且能克服拒绝服务攻击(Denial of Service)[55]。基于动力学系统的混杂学习控制在处理未知数据、跳变场景时具有一定优势[39]。人工神经网络则具有计算智能特性,与PID控制的融合能增强系统的控制性能,如滑模控制[56]、自适应控制[57]和强化学习控制[58]。
2 智能控制的若干研究进展
目前智能控制研究取得了一定进展,产生了许多控制方法,为解决复杂动态网络的同步、不确定环境下混杂非线性系统的稳定与协同等问题提供了可行方案,如表1所示。限于文章篇幅,下面仅简要回顾3类智能控制及网络可控性的研究进展。
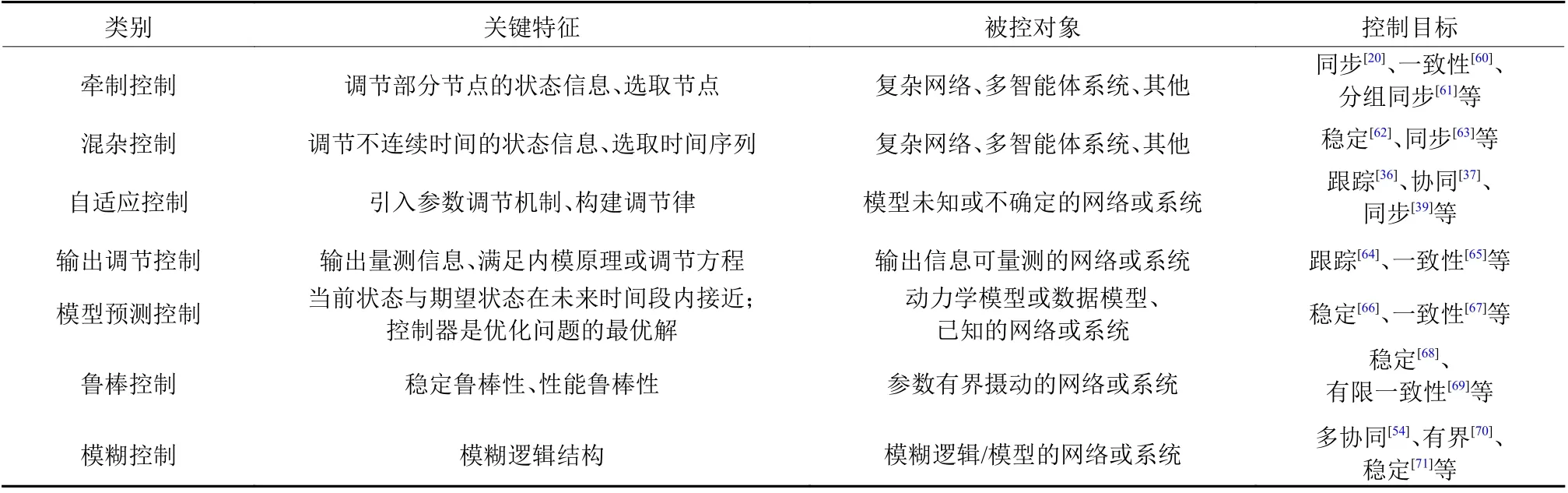
表1 典型智能控制方法Table 1 Typical intelligent control methods
2.1 牵制控制
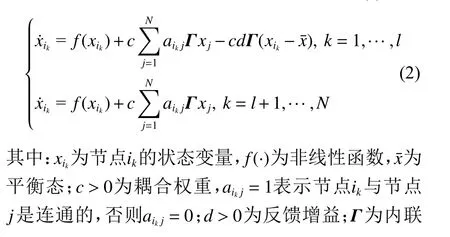
牵制控制(Pinning Control)的想法源自生物学。以秀丽线虫为例,它的体内有一个简单但完整的神经网络,有300多个神经元和5 000多个突触连接。对于这类生物神经网络,只需要刺激(控制)大约50个神经元,即可驱使线虫蠕动;观察鱼群迁移或蜂群觅食,也能发现类似的“只需控制部分节点便可控制整体”的现象[20]。受此类生物现象启发,也为回答这样一个问题:“To achieve some objective on a given and fixed network of dynamical systems, how many nodes one needs to control and at which nodes to apply the controllers can achieve a pre-designated objective most effectively?”,文献[59]提出了牵制控制方法,以有效解决大规模受控网络的平衡态稳定问题,如式(2)所示。矩阵。
主要结果如下:
定理1 考虑受控网络(2),假设存在常数ρ<0,使得∂f(x¯)+ρΓ为Hurwitz矩阵。如果耦合权重c满足
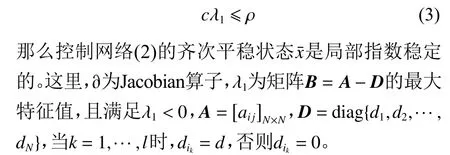
定理1及其证明详见文献[59]。在定理1中,条件(3)给出c≥|ρ/λ1|,意味着当λ1的绝对值较大时,可以选取较小的耦合权重便足以保证控制网络(2)的稳定性;结合控制矩阵D,这一条件说明,合理选取牵制节点和反馈增益d,使得 λ1的绝对值尽量大,可有效保证网络的稳定性。
以无尺度网络为例[59],在执行牵制控制实现同步时,相比随机选择控制节点的情形,如果控制器固定在网络度数排序最高的那些节点上,则所需控制器个数要小得多。对于小世界网络[19],即使将控制器随机应用到某些节点上,随着耦合概率的增加,即产生更多的连边,需要的控制器数量也会减少。近年来,牵制控制方法被广泛用于复杂动态网络的同步、多智能体系统的一致性等方面[60-61]。
2.2 混杂控制
随着数字设备的广泛应用,诸如机器人、工业化工过程等许多实际系统都包含离散规划决策和连续变化过程的交互作用,并呈现出混杂动力学行为。诸如切换、脉冲、事件阈值等混杂特性,对动力学系统的分析与控制提出了挑战。文献[72]提出了混杂控制系统(Hybrid Control System)的统一框架,指出“Hybrid control systems typically arise from the interaction of discrete planning algorithms and continuous processes, and, as such, they provide the basic framework and methodology for the analysis and synthesis of autonomous and intelligent systems”(混杂控制系统根据典型的离散规划算法和连续过程耦合作用产生。也正因此,可为自主、智能系统的分析与综合提供基础性的框架和方法)。随后,产生了诸多混杂控制方法,包括切换控制[73]、脉冲切换控制[62]、滑模控制[56]、事件驱动控制[32,55]等。
观察生物神经网络或突发性疾病(如癫痫)等演化过程可以发现,这类实际系统不仅在不连续时刻存在开关(也称切换,Switching)现象,还表现出某种脉冲(Impulsive)跳变效应。这是一类特殊的混杂动力学系统,经典的连续控制或切换控制难以保证其稳定性和鲁棒性。受此类脉冲−切换进化现象的启发,为解决混杂非线性系统的稳定问题,文献[62]提出了混杂脉冲−切换控制(Hybrid Impulsive and Switching Control)策略。通过集结脉冲切换的整体效应,得到了如下结果:
定理2 考虑下列混杂脉冲−切换非线性系统
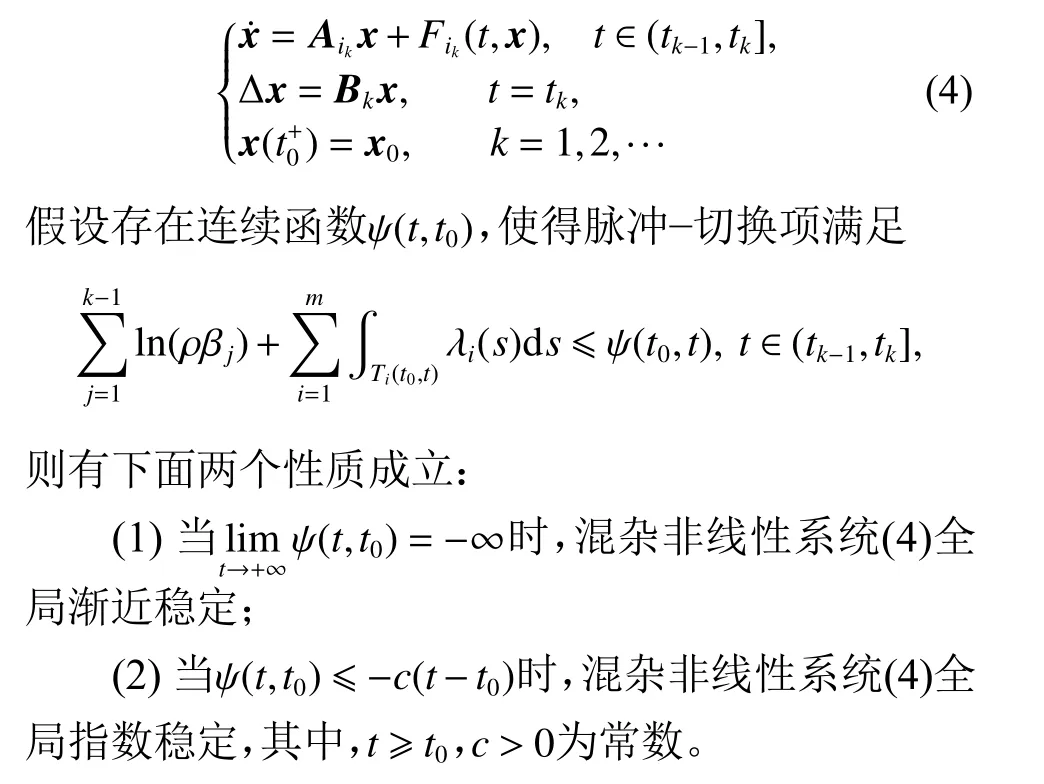

在式(5)中,时间序列{tk}k的选择大致可分为两类:时钟驱动(Time-clocked)[16,73]和事件驱动(Eventdriven)[32,74]。因此,相对连续控制,上述混杂脉冲−切换控制更灵活,可看作是一类多时空尺度控制器。时钟驱动机制按照固定或不定周期运行,事件驱动机制则是依据状态空间的某类阈值条件选择时间点。由于事件驱动机制在控制器更新频率、通讯资源等方面的优势,事件驱动控制被广泛应用于实现多智能体系统的协同与优化计算[55,74-75]。文献[16]引入混杂智能网络(Hybrid Intelligent Network),分别从自然网络(如脉冲神经网络)和人工网络(如多智能体系统)两个角度,探讨了混杂特性对智能产生过程及其动力学演化过程的影响。
2.3 自适应控制
自适应控制,与自组织控制(Self-organized Control,SOC)系统、参数自适应SOC、性能自适应SOC及学习控制系统(Learning Control System)等概念相关[66],通常被用来解决复杂未知、不确定场景下机器人的稳定或多智能体协同问题。文献[76]指出自适应控制一般由一组参数可调节的控制器(Controller)和一类参数调节机制(Mechanism)构成,主要包含以下步骤:
(1) 表征闭环系统的期望行为,如误差稳定、有界等;
(2) 构建可容许、参数可调节的控制律;
(3) 构建调节参数的合适机制;
(4) 执行控制器。
例如,针对连杆机械臂的轨迹跟踪问题,文献[36]提出了一类神经网络控制方法,由比例−微分反馈控制器和神经网络WTϕ(x)调节机制构成,W为权重矩阵,ϕ(x)为基函数;并引入了持续激励(Persistency of Excitation,PE)条件刻画基函数ϕ(x),以保证神经网络权重的有界性。机械臂的动力学模型由下列Euler-Lagrange方程给出:

同时,基函数ϕ(x)满足PE条件,则滤波跟踪误差r是全局一致最终有界(Globally Uniformly Ultimately Bounded, GUUB),且神经网络权重估计Wˆ是有界的。
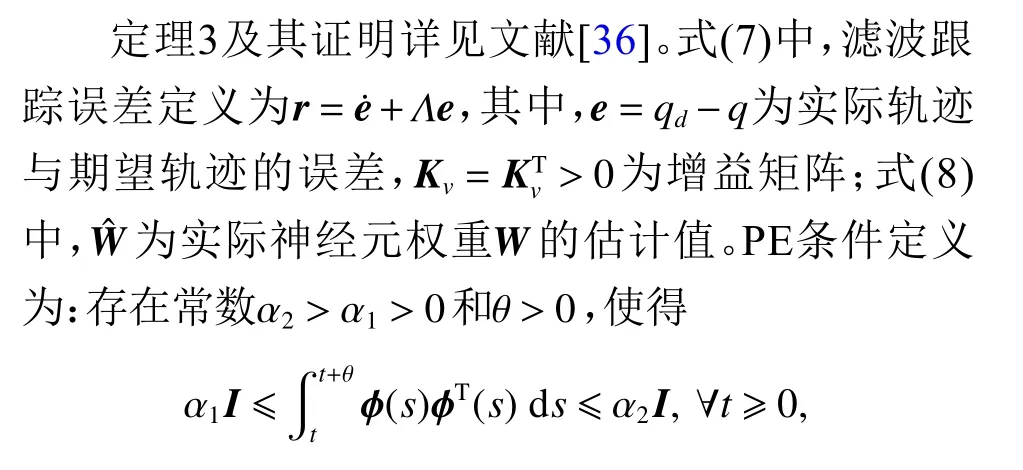
这里,I为单位矩阵。基于神经网络的自适应控制方法为解决未知、不确定场景下的稳定或协同问题提供了可行方案[37,57-58,70]。
2.4 网络可控性
被控系统在什么条件下能够实现控制?1960年,鲁道夫·卡尔曼(Rudolf Emil Kalman)引进了系统状态可控性(Controllability)与可观测性(Observability)两个基本概念,对于回答能否进行控制及综合等问题具有重要的意义。如果能找到一个控制输入,使得系统从任意初始状态出发,能够在有限时间内达到任意给定状态(例如零状态)[68-69],则称一个动力学系统是可控的。

此外,文献[21]研究复杂网络中连边动力学的可控性,发现相对一般网络,无标度网络具有较好的可控性。文献[81]研究建立了时变脉冲系统的可控性及可观测性条件。文献[82]研究含切换有向拓扑的复杂动态网络,建立了按时切换网络的可控性条件。
3 智能控制的若干应用方向
本节简单讨论复杂网络动力学与智能控制等研究在脑科学与机器行为学领域的可能应用。
3.1 脑科学
脑科学聚焦研究大脑如何工作,涉及生物学、物理学、数学和计算机科学等跨学科研究。脑网络活动的最新研究进展显示了对神经科学和网络动力学及其与非线性科学交叉的关注[45-47]。文献[2]运用基于图论的复杂网络定量分析技术,解析脑结构网络和脑功能网络之间的关联,并从不同实验模态数据(如结构/功能磁共振成像、弥散张量成像、脑磁图和脑电图等)出发,验证复杂脑网络结构的合理性。神经元的放电与通讯是大脑活动和功能的基础,文献[25]综述了复杂脑网络的通讯动力学(Communication Dynamics),从网络拓扑(空间)和时间角度,探讨通讯动力学对模拟大脑功能连接和预测网络演化状态的影响。文献[10]综述了控制神经生理过程对于大脑发育和认知功能的影响,并就麻醉管理、癫痫抑制和帕金森病的深脑刺激治疗,探讨了如何对病变的神经生理过程进行控制等问题。
中国脑计划如“脑科学与类脑智能”强调“一体两翼”:“一体”为阐明认知功能的神经基础,“两翼”分别为脑疾病诊断干预(即预测与控制)和脑机智能应用[7]。实证研究表明,记忆学习等功能的形成与神经系统的动力学机制有关,如动作电位的产生过程[35]、突触可塑性的STDP(Spike Timing Dependent Plasticity)机制[83]和感知决策的动力学模型[13]。结合血氧、脊髓液的动力学分析,复杂脑网络工具有助于构建动态的、可视化的健康或疾病脑网络,为控制(治疗)和预测(预防)脑疾病提供可行的方案[2,10,42]。
在类脑智能方面,尽管Hopfield神经网络、脉冲神经网络和卷积神经网络等人工网络在联想记忆、图像分类及语音等领域取得了重大突破,这些人工神经网络在某种程度上是类脑的,但仍然存在许多问题亟待解决。重要的研究问题包括:智能是如何产生的?我们对大脑和皮质网络的了解程度如何?神经系统的复杂网络动力学如何促进脑功能,如何控制认知行为?当前人工智能依赖大数据、缺乏因果性分析、难以应对开放环境,跨尺度的神经元动力学会是构建类脑智能的关键因素吗?等等。
3.2 机器行为学
复杂网络动力学与神经科学的交叉研究为解释和分析脑网络中功能(行为)与结构的关联提供了重要依据,是观察、复现人或动物行为的基础[2,13]。针对机器行为的建模,借鉴观察人或动物行为的方式是一类可行的研究方法[84]。
为了打破依赖单一物种的感知,文献[85]建立了机器人和动物(斑马鱼和蜜蜂)的生物混合系统,表明混合群体感知能够增强决策行为。利用神经科学和脑机接口,神经义肢技术(Neuroprosthetics)可以帮助肢体残疾患者恢复缺失的功能[11]。文献[86]利用融合脑电(Electroencephalo-graph,EEG)数据和神经解码技术,在机械臂上构建了非侵入式神经修复框架和控制模块,能够保证机械臂读取人类运动意念,完成连续的目标跟踪任务。采用进化牵制控制算法,多架无人机能合作完成协同任务[60]。然而,在特定任务中,容许机器人犯错误吗?机器需要人的指导吗?需要多少?这些问题需要深入研究。此外,采用智能控制技术,医疗机器人能够配合医护人员完成手术任务;多机器人协作能够处理复杂交错的多源感知输入,为完成复杂环境下的覆盖、搜索、编队、围捕等任务提供保证。
然而,在人机交互方面仍然存在诸多感知、学习和控制等问题,尤其要考虑人机协作中的适应性和安全性等因素。科学与技术的发展是“以人为本”,是为了扩展人类认识世界、改造世界的能力。对机器行为的研究要打破理论和实验的框架,体现更多的人−机−环境交互应用。这也使得复杂网络动力学与神经科学的交叉研究在机器行为学中具有一定优势。例如,将类脑智能算法(也许是集成感知、学习、容错和控制等多项功能的智能技术)编程到机器人的操作框架中,机器人或可自主地增强其适应性和安全性。
4 总结与展望
本文首先回顾了复杂网络、动力学系统、神经科学和智能控制的一些基本概念和原理,然后介绍了几类作者近年重点研究的智能控制方法,并简单探讨其在脑科学和机器行为学中的可能应用。
对于实际系统,阐释现象或行为背后的基本原理有助于重建系统,复现系统功能,进而凭借智能控制技术调节和增强系统功能。当前AI研究进展显示了复杂网络动力学、神经科学及智能控制的融合趋势,为设计类脑智能提供了可行的“自下而上”步骤。除了让机器会学习之外,类脑智能需要体现更多人类智慧,如集成学习、判别、容错和控制以及其他功能。因此,这个方向的发展需要更多交叉学科研究,绝不限于本文提到的复杂网络、动力学系统和神经科学。
展望未来,围绕“智能如何产生,其动力学行为如何演化、如何控制”等问题,智能控制的可能研究方向包括但不限于:
(1) 拓扑与动力学(Topology and Dynamics)整合机制下的牵制控制[20];
(2) 时空数据驱动的混杂智能控制(Hybrid Intelligent Control)[16];
(3) 基于强化学习(Reinforcement Learning)机制的自适应控制[87];
(4) 攻击环境下网络可控性(Network Controllability)的鲁棒特性分析[88];
(5) 智能控制的经济性、适应性与安全性分析,及其在脑科学、机器行为学等方面的实证研究与应用(Empirical Studies and Applications)[7,45,84]。
