面向无人机雷达通信一体化系统的轨迹与资源联合优化
2021-12-08范绍帅王煜菲田辉JieZhang史金鑫
范绍帅,王煜菲,田辉,Jie Zhang,史金鑫
(1.北京邮电大学网络与交换技术国家重点实验室,北京 100876;2.英国谢菲尔德大学电子与电气工程系,谢菲尔德 S102TN;3.中国人民解放军32683 部队,辽宁 沈阳 110000)
1 引言
近年来,随着雷达和通信收发系统中数字信号处理技术的发展,雷达和通信系统中的频谱重用和硬件一体化设计得到了广泛研究[1-2],雷达和通信一体化系统(IRCS,integrated radar and communication system)应运而生[3],有效缓解了频谱资源有限带来的压力,并减少了系统尺寸、功耗以及电磁干扰。然而,雷达与通信系统的融合也导致了系统对有限资源的竞争。目前,已有大量研究工作针对IRCS的资源分配问题展开了研究,例如,Wang 等[4]以最大化通信容量和雷达信干噪比(SINR,signal-to-interference-plus-noise ratio)为目标,给出了以雷达为中心和以通信为中心的闭式功率分配方案;Ahmed 等[5]针对分布式多输入多输出(MIMO,multiple-input multiple-output)雷达,提出了一种新颖的具备资源感知能力的雷达通信双功能策略;Zhang 等[6]在给定的阵列资源约束下,利用KKT(Karush-Kuhn-Tucker)条件设计了阵列资源分配。
无人机(UAV,unmanned aerial vehicle)具有部署方便、机动性强、成本低等优点,对辅助探测及无线通信具有重要作用。对于提高无人机通信网络的性能,目前已有大量研究[7-9]。将无人机应用于IRCS,无人机天线阵列分别产生雷达和通信波束,可提供通信和雷达感知能力,有效提高雷达探测和通信传输的灵活性。因此,无人机IRCS 具有良好的应用前景,适用于灾后地区探测、远海远洋目标探测等场景[10]。Liu 等[11]根据雷达探测的互信息(MI,mutual information)要求和基站用户的速率要求,联合设计了IRCS 和基站(BS,base station)对每个子载波的功率分配,使IRCS 的总发射功率最小化。Chen等[12]的研究表明,无人机数量的变化以及雷达波束功率与总可用功率的功率分配比将影响无人机组平均协同探测区域的性能。Wang 等[13]研究了无人机IRCS中的网络效用优化问题,为了平衡通信和感知性能,在定位精度的约束条件下,提出了无人机定位、用户关联和无人机传输功率控制联合优化问题。
文献[12-13]均考虑无人机组始终处于悬停静止状态,没有发挥无人机在IRCS 中机动可控的优势,并且算法优化过程中没有针对系统探测通信总容量。因此,本文考虑了时分复用模式下的无人机雷达探测和通信传输场景,以优化系统加权总容量为目标,提出了系统时间资源分配、功率资源分配和无人机轨迹的联合优化设计方法。为了求解该非凸问题,本文将原问题分解为3 个子问题,提出了一种交替迭代算法。所提算法采用了基于块坐标下降(BCD,block coordinate descent)和逐次凸逼近(SCP,successive convex programming)的方法,得到了原问题的收敛解。仿真结果表明,与其他对比方案相比,所提算法能够获得更高的系统容量性能,为系统的高效探测及信息回传提供保障。
2 系统模型及联合优化问题建模
2.1 系统模型
考虑一个如图1 所示的多无人机IRCS 场景,假设待探测区域(如受灾地区)已根据探测目标分布划分为若干子区域[14](如采用K 均值聚类算法),每架无人机在其中部分子区域上空环绕飞行并进行雷达探测及探测通信传输,多架无人机将共同完成所有子区域的探测及通信传输任务。
以单架无人机的探测通信任务为例,假设该无人机负责探测N个子区域,子区域中心表示为C={c1,c2,…,cN}。假设UAV 绕其待探测区域环绕一周,进行雷达探测和通信传输的总运行时间为T(T>0),第i子区域的运行时间为Ti(Ti>0),且。为避免雷达与通信信号之间的互相干扰,并且有效利用无人机飞行阶段的时间资源,本文中无人机以时分复用的方式进行雷达探测与通信传输,即在第i子区域中,将Ti分为雷达探测时间和通信传输时间,如图2 所示。
UAV 在Td时间内悬停在子区域中心上空,向待探测区域发送雷达探测信号,接收到来自环境的回波并进行信号处理,获得目标区域的相关信息[15],然后在时间Tt内飞至下一个子区域中心上空,在飞行过程中将探测得到的通信传输到最近的地面基站(GBS,ground base station)。UAV 在运行周期T内定高悬停探测和飞行,飞行高度为H。GBS 和UAV 在第i子区域内t时刻的坐标为Z0=(x0,y0,z0)和qi(t)=(xi(t),yi(t),H)。由于qi(t)为连续时间函数变量,本文采用时间离散方法[16]降低UAV 轨迹规划问题的复杂度,即将每个子区域的通信传输时间划分为M个相等的短时隙,每个时隙的时长为
由于每个子区域中时隙长度足够小,在每个时隙内无人机的位置可以认为是相同的,即UAV在i子区域内第j个时隙内的飞行位置可以表示为qi(j)=(xi(j),y i(j),H)。
2.2 雷达探测模型
基于雷达探测信号的散射传输特性,从UAV 到第i子区域的雷达探测链路信道平均功率增益为[17]
其中,Gt和Gr分别是雷达发射天线增益和接收机天线增益,为目标相对于雷达的有效截面(RCS,radar cross section),λ为雷达探测波长。
为评估IRCS 性能,需要寻找一种雷达与通信功能的统一化衡量指标,一种典型的性能统一衡量方法是将雷达探测的性能指标转化为类似通信系统信息率形式的性能指标,即基于雷达互信息的雷达估计率[18-21]。对雷达系统性能评估而言,MI 表征了探测目标和雷达接收信号之间的信息量,相关研究已发现MI 可以评估雷达目标脉冲响应的估计精度,最大化MI 可以有效提高雷达系统的目标识别能力[22-23],因此MI 是一种雷达测量和估计的性能评估指标的重要表征方式。本文考虑基于雷达MI 的表示方法,将雷达探测的性能指标转化为雷达估计率,将第i子区域中雷达探测互信息量表示为[19-20]
其中,表示无人机在第i子区域的雷达探测功率。
因此,无人机悬停期间的总雷达探测互信息量可表示为
2.3 通信模型
已有的研究工作表明[24],无人机−地面信道主要以视距链路为主,视距模型可以为实际的无人机−地面信道提供一个很好的近似值。因此,本文采用自由空间损耗模型对无人机与地面基站之间的通信信道增益进行描述,将第i子区域中UAV 与GBS之间的通信信道增益表示为
2.4 问题建模
本文的目标为通过联合优化时间分配β={βi,∀i}、雷达探测功率分配、通信传输功率分配,以及无人机轨迹,使无人机IRCS 运行周期内的通信和雷达探测加权容量之和最大化。基于上述分析,该优化问题表述如下。
其中,Rω和Cω分别为通信和雷达探测的权重因子;条件C1、C2 表示对于每个子区域,无人机在飞行期间将从该子区域中心飞行到下一个子区域的中心,并且无人机将在飞行周期结束时返回初始位置;条件C3 为UAV 的最大速度限制;条件C4 确保了无人机能够在每个子区域的通信传输时间内将雷达探测的数据完全回传到GBS;条件C5 为无人机雷达探测性能指标,表示指定的雷达探测目标表征性能MI 的阈值;条件C6 为UAV 总能量约束。显然,无人机通信传输功率、雷达探测功率以及时间分配都应该大于零。优化问题P1 包含时间分配参数β、功率分配参数Pd和Pt,以及无人机轨迹Q这4 个变量,由于目标函数和约束条件是非凸的,且4 个优化变量相互耦合,因此P1 是NP-hard问题[25]。
3 无人机轨迹与资源联合优化算法
为了解决P1,本文提出了一种有效的基于BCD 的次优迭代算法,通过固定变量法依次优化其中的单一变量,并依次迭代优化直到收敛。因此,该联合优化问题可解耦为3 个子问题:时间分配优化子问题、功率分配优化子问题和无人机轨迹优化子问题。
3.1 时间分配优化
给定功率分配和无人机轨迹,P1 的第一个优化时间资源分配子问题可以写为
由于P2 是一个线性规划问题,可以通过常见的线性优化方法有效解决,如使用MATLAB 中的CVX[26]工具箱。
3.2 功率分配优化
给定时间分配和无人机轨迹,P1 的第二个优化功率分配子问题可以写为
由于约束C4 等式左侧(LHS,left-hand-side)相对于雷达探测功率Pd和通信传输功率Pt是凹的,因此 P3 是非凸问题。为此,本文引入变量,将问题重新构建为
引理1P4 和P3 在雷达探测功率Pd和通信传输功率Pt上具有相同的最优解。
证明假设Pd和Pt是P4 的最优解,且使约束C11 满足严格不等式。那么,基于Pd和Pt,总能找到可以降低约束 C11 不等式右侧(RHS,right-hand-side)取值的另一个解Pd*和Pt*,在仍然满足约束C5 的条件下,使约束C11 满足等式。由于Pd*和Pt*不会降低P4 的目标函数值,因此它也是P4 的最优解。因此,P4 存在使约束C11 满足等式的最优解,而当约束C11 满足等式时,约束C10与约束C11 的结合与P4 中的约束C4 等价,约束C9 与约束C5 等价,此时,P4 和P3 等价。因此,P4 和P3 具有相同的最优解。证毕。
基于引理1,可以通过求解P4 得到P3 中Pd和Pt的解。由于约束C6 和C7 是线性的,目标函数、约束C10 的LHS 和约束C11 的RHS 相对于Pd和Pt是凹的,因此P4 是凸优化问题,可以使用常用的凸优化解算器,如CVX-Mosek[26],进行有效求解。
3.3 无人机轨迹优化
给定时间分配和功率分配,P1 的第三个优化无人机轨迹子问题可以写为
由于目标函数和约束C4 非凸,因此P5 是非凸问题。为了解决这个非凸问题,本文采用了SCP 技术,该技术在每次迭代中利用轨迹迭代初始点将优化问题近似为凸问题。假设Q(k)是无人机在第k(k≥0)次迭代中获得的轨迹,对于任何给定的无人机轨迹Q(k),系统在i子区域内第j个时隙内的通信链路容量可以写为
由文献[27]可知,凸函数可以在任意给定点利用其一阶泰勒展开式得到下界,即
因此,P5 可以通过求解其下限最大化问题来得到近似解。该问题表示为
由于约束C1、C2 及C3 是线性的,而约束C12是凸的,因此P6 在第k次迭代时是凸问题,可以使用常用的凸优化解算器,如CVX-Mosek[26],进行有效求解。
通过应用下界式(18)获得的P6 的解对于原始问题P5 是可行的。在第k次迭代中获得的近似解将被用作第k+1 次迭代的初始点。当P6 的目标值收敛时,迭代过程停止,由此得到了P5 的近似最优解。
基于这3 个子问题的解决方案,算法1 中总结了针对联合优化问题提出的基于BCD 的交替迭代算法。
算法1P1 的交替迭代算法
在引理2 中,本文进一步证明了算法1 的收敛性。
引理2算法1 可以保证收敛于P1 的次优解。
证明在第r+1 次迭代中,在给定功率分配以及无人机轨迹Qr下,通过求解P2 可以得到最优时间分配βr+1,此时有
其中,C(·)表示相应参数下的IRCS 加权总容量。
接下来,在时间分配βr+1以及无人机轨迹Qr下,通过求解P2 可以得到最优雷达探测功率和通信传输功率,由于P4 和P3 在雷达探测功率Pd和通信传输功率Pt上具有相同的最优解,此时有
最后,在求解无人机轨迹子问题时,在时间分配βr+1以及功率分配下,通过SCP 方法得到最优无人机轨迹Qr+1,此时有
因此,在第r+1 次迭代中,可以得到
由此可见,P1 的目标值在每次迭代中是非递减的。另外,在给定精度阈值ε的条件下,P1 经过有限次迭代的最优目标值存在上界。由于迭代过程中优化目标非递减并且优化目标有上限,算法1 的收敛性可以得到保证[16]。证毕。
本文所提算法同样适用于多无人机IRCS 场景。在多无人机IRCS 中,可根据待探测子区域地理分布特性,采取无人机任务区域预先划分的方式[14],如K 均值聚类算法,将多无人机探测通信任务优化问题解耦为若干单无人机优化问题。此外,也可采取离散空间搜索的方式,如模拟退火法[28]、禁忌搜索法[29],搜索得到无人机子任务区域的最优划分。考虑多无人机雷达探测过程中雷达信号之间的干扰影响问题,由于预先划分的子区域在空间上具有一定距离,并且雷达波束具有良好波束指向性[30],因此不同无人机间雷达信号的交叉干扰可以忽略。考虑多无人机与地面基站通信传输过程中通信信号之间的干扰影响问题,采用为各无人机与GBS 间的回传链路分配正交频段的方式[31-32],可以避免回传链路间的通信干扰。在任一无人机子任务区域划分结果下,各无人机的系统容量性能可通过本文所提轨迹与资源联合优化方法求解得到。因此,本文所提算法能够扩展适用于多无人机IRCS 场景。
4 仿真结果与分析
本文利用MATLAB 进行所提算法的性能仿真,仿真场景如图1 所示。以单无人机探测通信任务场景为例,仿真采用的详细参数如表1 所示。
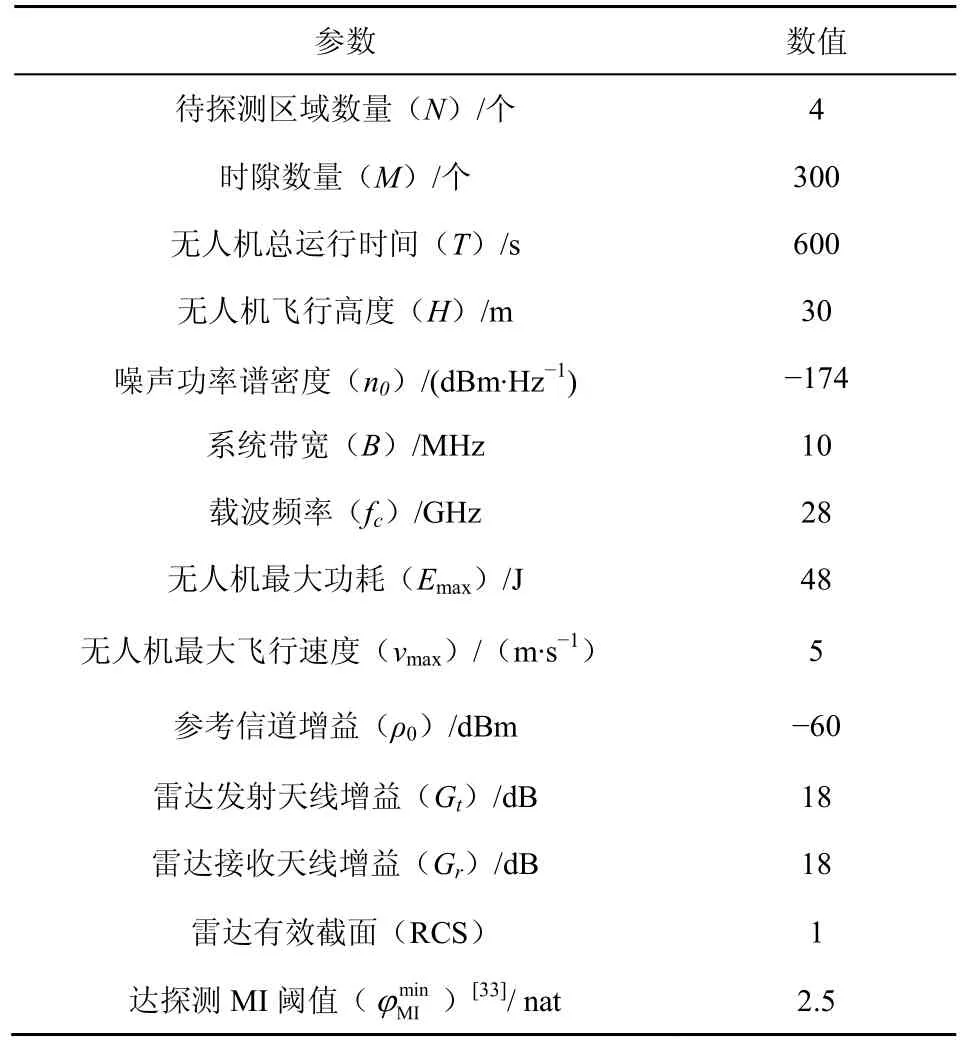
表1 仿真参数设置
图3 为雷达、通信容量权重比为1:1 时,不同子区域分配时间设定下无人机IRCS 容量与迭代次数的关系。可以看出,本文所提算法适用于不同的子区域Ti分配设定,Ti分配的不同会影响最终得到的 IRCS 优化容量。在T1:T2:T3:T4=1:1:1:1、T1:T2:T3:T4=1:2:2:2、T1:T2:T3:T4=1:2:1:2 以 及T1:T2:T3:T4=L1:L2:L3:L4(Li表示子区域中心ci至ci+1的距离)这4 种情况下,当T1:T2:T3:T4=L1:L2:L3:L4时,即子区域分配时间与子区域中心距离成正比时,得到的系统总容量最大。在子区域内目标特性不同的情况下,无人机循环工作总时间T应根据子区域目标特性进行分配,目标探测价值较高的子区域应被分配更大的Ti,该探测价值取决于子区域目标的重要性,如子区域面积、子区域内建筑物数量等。由于所提算法是在已知Ti分配决策后的优化算法,适用于不同Ti分配的情况,本文以T1:T2:T3:T4=1:1:1:1的子区域时间分配为例,进行了其余仿真。
图4、图5 分别为不同子区域遍历顺序下的无人机优化轨迹、无人机IRCS 容量与迭代次数的关系。可以看出,本文所提算法可适用于不同子区域遍历顺序,子区域遍历顺序的不同会影响最终得到的IRCS 优化容量,在遍历顺序1-2-3-4 与3-4-1-2、遍历顺序4-3-1-2 与3-4-2-1 的设定下,对应得到的IRCS 容量与无人机优化轨迹完全相同,这是由于2 种对应遍历顺序实际上只存在循环起点与方向上的不同。而子区域遍历顺序4-3-1-2 下得到的IRCS 优化容量略高于遍历顺序1-2-3-4,这是由于前者可以使无人机轨迹整体更偏向于GBS,从而能够得到更高的通信信道功率增益。子区域遍历顺序应根据子区域目标特性进行确定,目标探测价值较高的子区域将进行优先遍历,例如,具有面积较大、所含建筑物灾后抢险价值较高等特性的子区域将具有更高的探测优先级。本文所提算法是在已知子区域遍历顺序决策后的系统容量优化算法,适用于不同子区域遍历顺序,本文以子区域1-2-3-4 的遍历顺序为例,进行了其余仿真。
图6 为雷达、通信容量权重比为1:1 时,不同算法下无人机IRCS 容量与迭代次数的关系。本文将所提方案与以下方案进行了比较:1) 无人机功率分配固定,i=1,2,…,N,j=1,2,…,M)时间分配与无人机轨迹迭代优化方案(时间轨迹优化算法);2) 无人机时间分配固定(βi=0.2,i=1,2,…,N),功率分配与无人机轨迹迭代优化方案(功率轨迹优化算法);3) 无人机轨迹固定,沿直线飞行,时间分配与功率分配迭代优化方案(时间功率优化算法)。如图3 所示,本文所提算法、时间轨迹优化算法以及功率轨迹优化算法得到的优化容量随着迭代次数的增加而增加,最终在约6 次迭代后达到收敛,时间功率优化算法在一次迭代后即达到收敛。可以看出,本文所提算法获得的系统加权总容量明显高于其他3 种算法。仿真结果表明,时间、功率以及无人机轨迹控制是提高系统容量的有效途径。此外,时间轨迹优化算法的所得容量高于功率轨迹优化方案算法及所得容量,说明了时间分配比功率分配对优化效果的影响更大。
图7 为雷达、通信容量权重比为1:1 时,所提算法在不同仿真参数设定下得到的优化容量与迭代次数的关系。可以看出,随着无人机总运行时间的增加,所得系统容量逐渐提升;随着无人机最大飞行速度的增加,所得系统容量逐渐提升;随着无人机高度的增加,由式(2)和式(5)可知,雷达探测链路和通信传输信道功率增益越差,导致系统容量下降。
图8 为所提算法在不同雷达、通信容量权重比下得到的IRCS 容量与迭代次数的关系。可以看出,当雷达链路互信息量与通信链路容量采用归一化权重比时,算法达到收敛后,不同权重下IRCS 容量达到一致。这是由于在仿真环境设置下,该IRCS中通信信道功率增益远小于雷达信道功率增益,为保证无人机能够在每个子区域的通信传输时间内将雷达探测的数据完全回传到地面基站,需满足通信传输链路容量不小于雷达探测链路互信息量,当雷达容量权重较大时,算法结果达到收敛时将满足通信容量与雷达互信息量相等;而当通信容量权重较大时,除非通信容量权重远大于雷达互信息量权重,否则由于通信与雷达信道增益差异对目标函数的影响远大于权重差异的影响,当算法结果达到收敛时,仍然需满足通信容量与雷达互信息量相等。另外,由于雷达探测是该IRCS 的一项基本任务,在实际场景中,雷达探测性能权重不会过低。由于权重满足归一化条件,因此,仿真得到的不同权重比下的系统总容量最终均相等。
图9、图10 分别为雷达与通信容量权重比为1:1 时,优化雷达探测时间、通信传输时间与迭代次数的关系。可以看出,系统的大部分时间资源被分配给了通信传输过程。这是因为相同时间内雷达探测的互信息量远大于通信链路的容量,因此通信传输链路需要被分配更多的时间以满足其容量大于雷达探测互信息量的要求。
图11、图12 分别为雷达与通信容量权重比为1:1 时,优化雷达探测功率分配、通信传输功率分配与迭代次数的关系。可以看出,分配给第1 和第4 子区域的雷达探测和通信传输功率大于第2 和第3 子区域,这是由于第1 子区域和第4 子区域比其他子区域离GBS 距离更近,导致其具有更大的通信信道功率增益。本文中不同子区域经优化后的探测悬停时间有所区别,分配到更多探测时间的子区域将可以收集到更多的价值信息,即不同子区域获得并需要回传的信息量有所区别。所提优化算法通过最大化链路容量达到最大化回传信息量的目标,在各子区域所分配到的时间与功率资源均已满足其最低雷达探测互信息量指标的情况下,将额外的功率分配给具有更大通信信道功率增益的子区域,将能够带来更大的容量增益并获取更多的价值信息。因此,为距离GBS 更近的第1 和第4 子区域分配更多功率资源可以提高系统的总容量。另外,由仿真结果可以看出,当优化变量达到收敛时,优化雷达探测功率小于优化通信传输功率,这是由于在该IRCS 中,无人机雷达低空近地探测待探测区域,并与地面基站进行远距离通信传输,由于雷达探测距离明显小于无线通信传输距离,导致通信传输信道功率增益远小于雷达信道功率增益,因此,最终得到的雷达探测功率小于通信功率,该结果保证了无人机能够在每个子区域的通信传输时间内将雷达探测的数据完全回传到地面基站,即满足通信传输链路容量不小于雷达探测互信息量。
图13 展示了雷达、通信容量权重比为1:1 时,所提算法在不同迭代次数下所获得的最优轨迹。可以看出,所提算法的优化轨迹由4 条趋向于GBS的曲线组成,每条曲线的起点和终点的投影坐标分别为相邻子区域的中心点。这是由于为满足通信传输链路的容量不低于雷达探测互信息量这一约束条件,无人机需要被分配更多的飞行时间用于与GBS 间的通信传输,并且由式(2)可知,无人机沿着趋向于GBS 的曲线飞行可以提供更好的通信信道,从而提高系统的容量。还可以观察到,随着迭代次数的增加,优化轨迹趋向于GBS 的程度不断增加,且变化趋势越来越小,无人机轨迹趋于收敛。
此外,如图6 至图12 所示,优化目标及变量在约6 次迭代后达到收敛,因此仿真验证了所提算法的快速收敛性,说明所提算法可有效适用于无人机的快速优化控制。
5 结束语
为了优化无人机IRCS 中时分复用模式下雷达探测链路及通信传输链路的加权总容量,本文研究了时间资源分配、功率资源分配和无人机轨迹的联合优化策略。本文提出了一种基于BCD 和SCP 技术的有效算法,将原问题分解为3 个子问题,并交替求解。仿真结果验证了所提算法的快速收敛性,并表明该算法能够获得更高的系统容量性能。
