基于主动驱动旋转的全角模式半球谐振陀螺驻波漂移补偿方法
2021-12-06解伟男伊国兴王泽宇奚伯齐
王 奇,解伟男,伊国兴,王泽宇,奚伯齐
(1.哈尔滨工业大学 航天学院,空间控制与惯性技术研究中心,哈尔滨 150080;2.哈尔滨工业大学(鞍山)工业技术研究院,鞍山 114000)
半球谐振陀螺是在传统的机械转子式陀螺和光学陀螺之后发展的新一代高精度陀螺,具有高精度、高可靠性、寿命长、抗辐射等特点,是主流高精度惯性器件之一,已在航天、航海等领域广泛应用[1]。目前仅美国、法国、俄罗斯及中国具备半球谐振陀螺的生产能力。法国的Sagem公司通过其研制过程证明半球谐振陀螺不仅仅是一种创新的陀螺,更是一项颠覆性的技术突破[2]。国内前期研究工作主要集中在力反馈式半球谐振陀螺,全角模式半球谐振陀螺研究尚不完善,尤其是针对由于半球谐振子加工误差等因素导致的品质因数不均匀,引起谐振子驻波漂移等问题亟待解决[3-5]。本文提出了一种基于主动驱动旋转的全角模式半球谐振陀螺驻波漂移补偿方法。全文结构如下:首先,根据谐振子二阶振动理论模型推导了由于品质因数不均匀引起的谐振子驻波漂移模型。其次,提出一种通过测试转台辨识漂移速率峰值及阻尼轴位置的方法。最后,通过主动驱动谐振子驻波旋转补偿谐振子驻波漂移,并搭建实验平台验证方法的有效性。
1 半球谐振子驻波漂移理论分析
理想情况下,半球谐振子振动模型可以等效为质点在二维空间的简谐运动,根据Lynch推导有半球谐振陀螺二阶振动模型[6-8]:

其中,k为进动因子,Ω为外界角速度输入,,,,,τ1、τ2为阻尼简正轴的时间常数,θτ为时间常数τ1阻尼简正轴的方位角,ω1、ω2为频率简正轴谐振频率,θω为谐振频率ω2频率简正轴的方位角。
在外界角速度输入Ω为零的条件下,通过对式(1)的求解,得到全角模式半球谐振陀螺输出误差φ˙传播方程:

其中,a主波波幅轴,q正交波波幅轴,φ驻波方位角。
在正交控制回路的作用下,q≈ 0,驻波漂移主要由品质因数不均匀导致,上述方程可简化为:

2 半球谐振子驻波漂移模型参数辨识
针对半球谐振子品质因数不均匀导致的驻波漂移进行补偿,需要辨识半球谐振子阻尼轴位置及漂移速率峰值。在未补偿的情况下,陀螺经过上电、起振、稳定等过程之后,谐振子驻波将逐渐漂移并稳定在距离最近的品质因数较大阻尼轴的附近。因此,驻波漂移范围只能在品质因数较大和较小的两个阻尼轴之间,无法完整检测到谐振子周向漂移速率[9]。针对上述问题,本文提出如下测试方法:将半球谐振陀螺固定在测试转台上,通过转台给定恒定大于陀螺漂移速率的角速度输入,使谐振子驻波旋转整周以上,可以测得谐振子由于阻尼不均导致的周向漂移速率。
转台给定半球谐振陀螺正向输入:

其中,ωP为正向输入时陀螺检测角速度,ωr为测试转台给定角速度,ωd为陀螺漂移角速度,ωe为地球自转角速度。
转台给定半球谐振陀螺反向输入:

其中,ωN为反向输入时陀螺检测角速度。
由式(4)(5)得:

图1-4分别是测试转台正向输入0.2 °/s及反向输入-0.2 °/s角速率两种条件下,角速度-时间及角速度-方位角陀螺测试曲线。

图1 正向输入角速度-时间曲线Fig.1 Forward input angular velocity-time curve

图2 正向输入角速度-方位角曲线Fig.2 Forward input angular velocity-azimuth curve

图3 反向输入角速度-时间曲线Fig.3 Negative input angular velocity-time curve

图4 反向输入角速度-方位角曲线Fig.4 Negative input angular velocity-azimuth curve
通过上述方法,采用非线性最小二乘拟合算法辨识:漂移速率峰峰值为0.2254 °/s,阻尼轴与x轴夹角80.7221 °,因此由于品质因数不均匀导致的驻波漂移表达式:

3 半球谐振子驻波漂移补偿方法
如图5所示,通过对x、y两方向电极施加驱动力,驱动力方向垂直于半球谐振子振动波幅轴方向,使半球谐振子驻波以一定角速度主动旋转[10]。

图5 驻波驱动力示意图Fig.5 Standing wave driving force
将辨识的全角模式半球谐振陀螺周向零漂速率缓存在控制电路处理器中,在陀螺工作时,实时检测谐振子振动波幅轴与电极夹角,确定驻波当前位置漂移速率。
同时施加驱动力,驱动驻波以大小相等方向相反的速率主动旋转,可以抵消陀螺自身由于品质因数不均匀导致的驻波漂移,如图6所示,使驻波稳定在当前位置,达到漂移补偿的目的。

图6 驻波漂移补偿示意图Fig.6 Standing wave drift compensation
4 补偿实验与结果分析
根据上述驻波漂移补偿方法进行实验,如图7半球谐振陀螺实验平台包括半球谐振陀螺表头、以FPGA、AD、DA等搭建的全数字控制电路、电源系统及测试转台[11]。

图7 半球谐振陀螺实验平台Fig.7 Hemispherical resonantor gyro experimental platform
如图8及图9所示,进行一次补偿后,再通过谐振子周向漂移速率辨识方法进行测试,漂移速率由峰峰值0.2254 °/s下降到0.02678 °/s,降低了88.12%。从图8-9中可以看出,同一方位角补偿后速率波动有一定增加,是由于主动驱动旋转对于半球谐振陀螺控制回路相当于一种“干扰”,导致陀螺输出速率噪声峰峰值增大0.0001°/s左右,但仍然可以满足陀螺性能要求。

图8 一次补偿后角速度-时间曲线Fig.8 Angular velocity-time curve after primary compensation

图9 一次补偿后角速度-方位角曲线Fig.9 Angular velocity-azimuth curve after primary compensation
在陀螺漂移幅值和阻尼轴位置参数辨识精度,以及主动驱动旋转速率精度的影响下,一次补偿后仍有部分残余驻波漂移,可以通过一次补偿后的结果进一步优化相应参数进行二次补偿。
如图10及图11所示,进行二次补偿后,漂移速率由一次补偿后峰峰值0.02678 °/s下降到0.01004 °/s,降低了62.51%。相比于未补偿驻波漂移速率峰峰值0.2254 °/s,降低了95.55%。
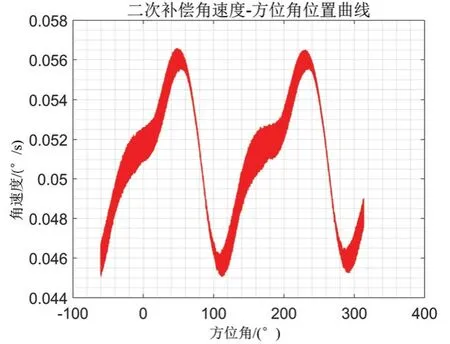
图11 二次补偿后角速度-方位角曲线Fig.11 Angular velocity-azimuth curve after secondary compensation
从图10-11中可以看出,补偿后的角速度曲线出现非四次项谐波,是由于本文对品质因数不均匀导致驻波漂移建模时,主要考虑四次谐波对陀螺影响。当驻波漂移主要部分被补偿后,其他次项谐波作用效果凸显。

图10 二次补偿后角速度-时间曲线Fig.10 Angular velocity-time curve after secondary compensation
经过多次补偿实验结果表明,在二次补偿的基础上继续进行残余驻波漂移补偿,补偿效果并不显著。残余漂移进入“死区”状态,在同一方位角增加反向主动驱动速率,驻波漂移速率几乎不变,继续增加驱动速率,会导致谐振子周向漂移方向翻转。上述现象可能是由于x、y两路驱动信号非对称性导致,仍需进一步理论研究。
5 结 论
本文根据非理想谐振子二阶振动模型推导了由于品质因数不均匀引起的谐振子驻波漂移模型。通过测试转台辨识得到驻波漂移速率峰值0.11270 °/s及阻尼轴与x轴夹角80.7221 °。提出一种主动驱动驻波旋转补偿驻波漂移的方法,并在全数字控制电路上实现,最后通过实验平台验证:补偿后的驻波漂移速率降低了95.55%,可以有效减少品质因数不均匀对陀螺性能的影响。后期工作将致力于进一步研究驻波漂移机理,优化补偿方案,提升半球谐振陀螺整体性能。
