长大隧道施工测量若干问题研究
2021-12-04闫骁恺
闫骁恺
(中化学交建集团山东省公路工程技术研究中心有限公司,山东济南 250200)
0 引言
长大隧道是指单座隧道洞门长度在5000m 以上的隧道。国内常见的有秦岭终南山隧道,全长18.4km;乌鞘岭隧道,全长20.05km;大瑶山隧道,全长14.29km。经过十几年的发展,隧道测量技术也有了较大的进步,主要在自动化程度方面有了很大提高,测量过程中使用的设备质量有所提高而体积有所缩小,测量的效率以及速度都有了较大程度的提高。针对测量实际工程以及大地层面,其中比较典型的发展代表是GPS 以及全站仪的普遍使用,同时将计算机技术和以上两种技术相互结合应用在实践中。
隧道测量技术是指针对隧道勘察设计、施工和竣工验收以及隧道运营期间所开展的有关测量活动,这些测量工作有些与通常意义上的工程测量有关,如隧道施工控制测量、贯通测量、放样测量、断面测量等,有些与地质勘察和灾害监测有关,如隧道施工地质超前预报探测和变形监测,还有一些与工程质量检测有关,如混凝土厚度检测、混凝土质量检测、隧道衬砌背后回填检测、运营隧道内表面状态检测。
1 控制测量
隧道的控制测量精度质量对减小隧道横向和高程贯通误差、保障洞口内外的准确接线有着举足轻重的影响,为保证隧洞在允许精度内贯通,首先要分别对洞内、洞外平面和高程控制测量方案进行设计,在未贯通前对已施测的测量成果进行相应的精度估算,采取合理的方案保证控制测量精度,以高质量的测量成果指导施工测量放样保证工程顺利完成。
1.1 平面控制测量方案设计
洞外控制网布设。在设计分布平面GPS 控制网的过程中,需要把GPS 观测对控制位置附近环境提出的要求以及控制隧道线路洞口和平面的需求考虑在内,GPS 控制网的构成主要包括洞口子控制网以及不同子控制网之间的联系网。组成洞口子网的网型主要是具有相对较高强度的网型,比如中点多边形、大地四边形等,控制子网之间互相进行通视的边则主要选择使用GPS 直接观测基线;土层联系网的全部都是三角网。在设置洞口位置时,需要将两个方面因素作重点考虑,首先设置洞口位置后,视竖直角不可超过5度;其次洞口设置完成后,保障至少两个后视点可以相互通视[1]。
布局设置隧洞之内的平面控制网。在设计布局隧道内导线时,需要基于隧洞外的控制测量数据,同时与隧洞之内的施工特点相结合。隧洞内部的导线需要选择的起始位置为洞口控制位置,在线路中,沿线需要设计分布的测量导线要求分为两组,从而构成多边形闭合导线环。在地下平面控制网布设中,导线一般布置成直伸导线闭合环、主副导线闭合环、全导线网以及自由测站边角交会网的形式,如图1、图2、图3、图4所示。
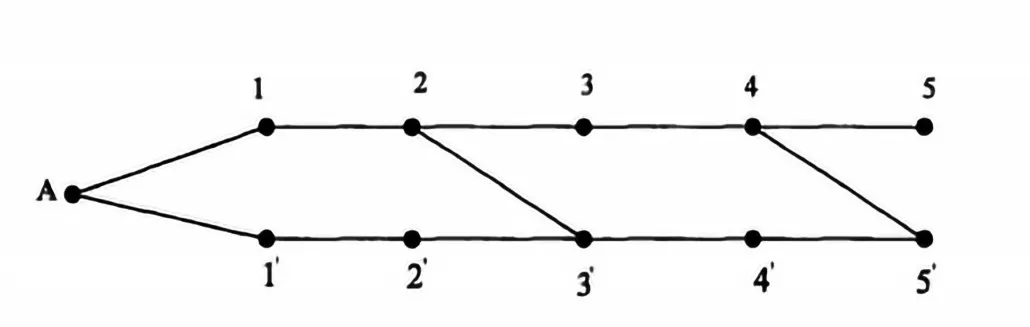
图1 直伸导线闭合环

图2 主副导线闭合环
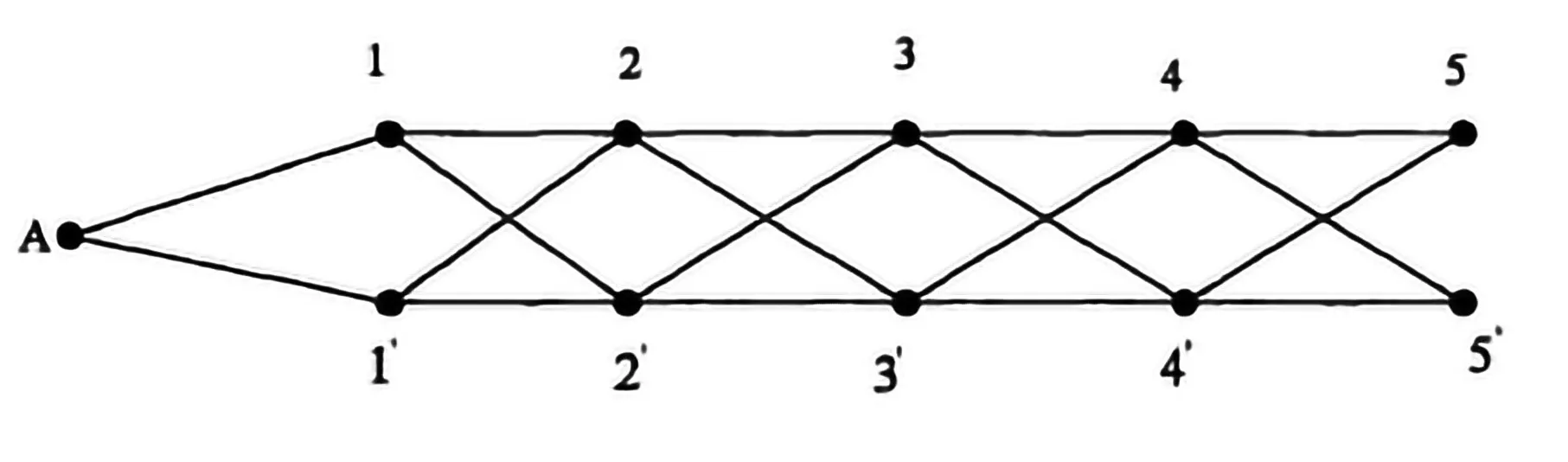
图3 全导线网

图4 自由测站边角交会网
直伸导线闭合环或主副导线闭合环,有利于减少导线的横向点位误;尽量使导线沿垂直于贯通面的方向延伸,有利于减少测距误差对横向贯通的影响;尽可能采取长边,有利于减弱测角误差对横向精度的影响。然而,直伸导线闭合环或主副导线闭合环也存在一定问题,其网型强度不高[2]。
全导线网检核条件较多,网型强度大,能很好地提高点位精度,对贯通精度增益大,但其网型复杂,工作强度大。
自由测站边角交会网不仅能够有效减少旁折光的影响,无需考虑其中误差,而且点位精度均匀。
1.2 隧道横向贯通误差预计
在设计隧道工程的期间,就要求预先估计预先设计的测量方式以及相关方案的误差,在对该方案能否达到工程精度要求进行判断时,主要借助估算误差所形成的贯通误差完成,根据判断的结果,对测量的方式以及相关方案及时进行修正[3],如表1所示隧道贯通误差要求。
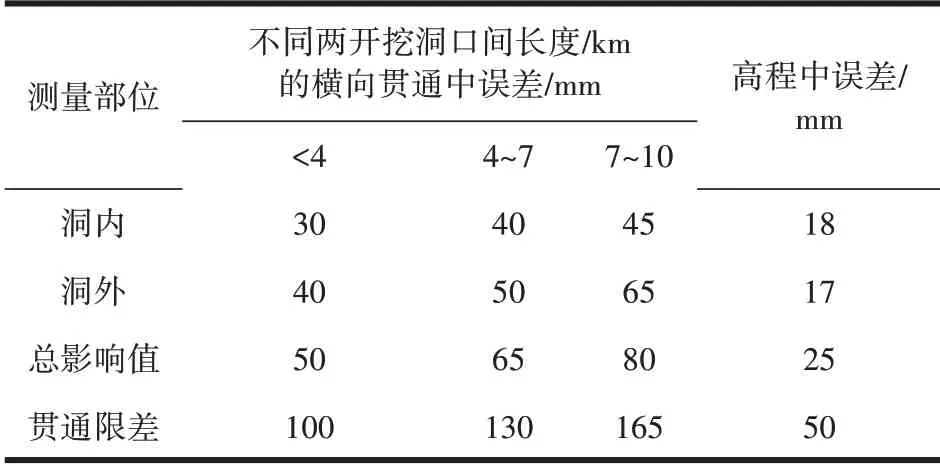
表1 横向贯通误差精度技术要求
对于隧道横向贯通误差预计,可以从洞外控制测量、洞内控制测量两个方面进行研究。导致洞外控制测量形成贯通误差的主要因素有三个:测角误差myβ上、量边误差myl上和洞口两端起始方位角误差mya。

式(1)中:mβ上为地面导线的测角中误差;为导线边长的相对中误差;为导线点至贯通面的垂直平方和;为各导线边在贯通面上的投影长度平方的总和;mα1、mα2为隧道洞口两个端口起始边方位角误差;R1、R2为隧道洞口两个端点位置到贯通面之间垂直方向的距离[4]。
横向贯通误差的产生原因为洞内控制测量误差:

式(2)中的含义与式(1)相同,在实践中讨论最广泛也至关重要的是横向误差。在横向误差比相应的限度范围更大的情况下,就会导致隧道中线几何形状发生变化,更影响着隧道洞之内的建筑物还会对规定的界限进行入侵,致使需要将衬砌部分拆除,再次建设,因此会产生更大的经济损失。
2 监测隧道形状的变化
隧道在使用与运营过程中会产生变形,如拱顶下沉、隧道收敛等。了解变形,研究其产生的根源、特征及其随空间与时间的变化规律,加强变形监测和预测、预报工作,避免或尽可能减少损失,是变形观测的主要任务。变形测量是利用专用的仪器和方法对变形体的变形现象进行持续观测、对变形体变形性态进行分析和对变形体变形的发展态势进行预测等各项工作的总称。其任务是确定在各种荷载和外力作用下,变形体的形状、大小及位置变化的空间状态和时间特征。
2.1 隧道变形监测技术方法
变形监测具有观测时间长、精度要求高、需重复观测、数据处理方法严密等特点。测量等级及精度取决于变形观测目的、变形观测体的级别以及预计变形量的“必要精度”。变形观测周期应以能系统反应观测变形体的变形过程且又不遗漏其变化时刻为原则,应根据单位时间内变形量的大小及外界因素的影响程度来确定。
变形监测是一种精密的测量技术,变形观测方法与测量仪器的发展密切相关,其观测的基本方法以下几种。
大地测量法:经过划分后该种方式又包括空间大地以及常规大地测量方式。其中,常规大地测量方式中又有三角高程测量、几何水准测量、交会以及导线测量方式。虽然该种方式测量获取的结果具有更高的精准度,同时应用相对更加灵活,存在该方面的优势,然而在野外工作时容易受到外部环境的干扰,工作总量较大,所以在进行实时监测以及连续监测的自动化上比较困难。
摄影测量法:近景摄影测量,这种方式能够测量丰富的信息量,同时在外部环境中工作相对更加容易,能够适用于大面积复测,同时还能够实现动态观测,然而该方式获取的结果精度相对较低。
专用设备法:专用设备包括各种准直仪、倾斜仪、液体静力水准仪、微水准器和应力计等,该法最大特点是相对精度高,容易实现自动化连测和遥测,但测量范围较小,适用于提供局部形变信息的变形观测[5]。
2.2 变形监测控制网
变形观测的控制以创建变形监测控制网为基础。因为整个工程涉及的范围、对精度方面的要求、所处的环境以及工程量等方面都存在差异,在实践中应建立不同的变形控制网。如果在允许的条件下还能借助于施工控制网,变形监测控制网需要选取应用专用的控制网。进行变形测量,主要以变形监测控制网作为参考,在对变形监测控制网进行设计布局的过程中需要将变形观测周期内的稳定性、可靠性考虑在内,同时还要考虑到使用的便利性。
由于施工中外部环境比较复杂,而且受到施工条件的影响,因此随着变形体的发展变化需要及时修正变形测量设计的方案,从而使形状发生改变之后能够适应新的改变。需要对对象发生改变的状态进行全方位的掌握和了解,而且还要求同步完成地上形变和地下形变的监测。
在选择布局控制网的形式时,要求结合变形观测精度要求、变形体附近的环境以及相关的仪器装置,在相同的测区内进行全面化的考虑,借助于估算精度或改善设计的方式进行确定。
选择使用统一的坐标系统或高程系统作为控制网。通常情况下,选择使用一级布网,尽可能的做到图形简单,具有较小的传递误差。如果测量范围大或者观测位置相对分散,针对一个范围内要求的观测精度存在区别的情况下,就可以单独完成首级网以及加密网的布局设计,加密网也可以选择使用区域范围的独立网,如图5所示。

图5 变形监测基准网
2.3 选择基准点
针对建筑物上一系列比较典型的位置,再次进行观测,从而对点位的改变量进行对比就是变形观测,由此能够发现,变形监测不但要在建筑物上设置位置,同时还需要选择一部分参照点作为基准。以上这些位置主要借助于相应的关系以及几何图形进行连接,从而形成变形观测系统。
不管是平面控制网还是高程控制网,通常情况下,构成一个观测区的位置共有三种,分别是工作基点、基准点、观测点。对变形观测位置进行直接测量的参考就是工作基点,对建筑物空间位置发生移动进行反映的标志就是观测点。通常情况下,设计的观测点至少为三个,稳定可靠的基准点的小测区的设计能够低于三个,只需要对相对位移量的观测范围进行测定,能够设计布局固定的或者临时性的观测位置,不需要对位置的稳定性过分强调。工作基点和基准点通常会形成首级网,而变形观测位置及工作基点共同组成次级控制网。
工作节点及基准点的位置,除了要达到可靠性和稳定性的要求外,还需要将合理性与经济性考虑在内,能够在一个控制位置完成其他目标点的观测。
3 结语
本文通过分析隧道工程施工测量相关资料并参考所学工程测量相关知识,系统分析了隧道施工测量各个阶段所用的测量技术方法,并对各种方法的特点进行比较分析,再综合考虑其他因素,如施工环境、施工技术的工艺特点、经济优越性等因素,选择出比较适合的施工与测量的技术方法。
从隧道施工控制网的布设和横向贯通误差的预计到隧道变形监测均进行了归纳总结,针对施工过程提出需要注意的问题,在整个测量施工过程中起到指导性作用,从而为其他隧道设计工作人员提供标准参考。
