机器人减速器的启发式教学探讨
2021-12-02黄龙尹来容
黄龙 尹来容


摘 要:机器人常用的减速器包括行星减速器、谐波减速器和RV减速器,尽管采用的都是齿轮传动,但其原理和性能都有较大差异。传统的机器人减速器教学中对其原理的直观阐述较少。本文尝试探索减速器的启发式教学方法,将减速器视为机械综合创新设计实例,让学生把之前学过的机械原理知识有效的串联起来,尤其是齿轮机构、平行四边形机构、偏心轮机构之间的等效代换,给学生以创新的启迪。
关键词:行星减速器 少齿差 RV减速器 启发式教学
中图分类号:G642;TP242.2 文献标识码:A 文章编号:1674-098X(2021)07(b)-0159-04
Heuristic Teaching of the Robot Reducers
HUANG Long YIN Lairong
(College of Automotive and Mechanical Engineering, Changsha University of Science and Technology, Changsha, Hunan Province, 410114 China)
Abstract: The commonly used reducers of robots include planetary reducers, harmonic reducers and RV reducers. Although they all adopt gear transmission, their principle and performance are quite different. In the traditional teaching of robot reducer, there is less intuitive explanation of its principle. This paper attempts to explore the heuristic teaching method of reducer, regarding reducer as an example of mechanical comprehensive innovative design, so that students can effectively connect the mechanical principle knowledge they have learned before, especially the equivalent replacement among gear mechanism, parallelogram mechanism and eccentric mechanism, so as to give students innovative enlightenment.
Key Words: Planetary reducer; Less teeth difference; RV reducer; Heuristic teaching
机器人的结构设计教学离不开机器人的关键部件之一——减速器,这也是机器人教学中的重点和难点[1-3]。机器人常用的减速器包括行星减速器、谐波减速器和RV减速器。行星减速器的优势在于加工装配工艺成熟,成本低廉;谐波减速器的特点是重量和体积较小,运动精度较高,传动比较大;RV减速器的特点是体积相对紧凑,刚性和寿命较高,承载能力强。在现有的机器人相关教材中,对于减速器这一关键部件通常都比较笼统,只会简要介绍其组成、特点和传动比公式,而缺乏对其传动原理的直观阐述[2]。这种内容编排方式一方面是由于教学时长的限制,另一方面是减速器的原理介绍需要较多的知识铺垫[4-7]。从实际教学效果来看,学生大多认为这一部分的講述过于简单,难以理解为什么谐波减速器和RV减速器可以在紧凑的体积下实现大的传动比,尤其对RV减速器的具体结构和运动原理存在较多的疑问。虽然学生可以通过记忆减速比公式和相关特性来通过课程考试,但是知其然而不知其所以然,在一定程度上会影响后续章节的学习。
1 普通行星传动和少齿差行星传动的启发式教学
谐波减速器和RV减速器都属于少齿差传动,原理相对复杂。现有教材大都没有对谐波减速器和RV减速器的基本减速传动原理进行深入的探讨。本文从启发式教学角度来探讨机器人常用减速器的基本传动原理,尝试通过演化、变异、组合等方法,使学生理解减速器的传动原理以及减速比的直观推导过程。
常见的行星减速器一般包括固定的内齿圈、太阳轮和3个行星轮,其中太阳轮转动作为输入,行星架的转动作为输出,自由度为1。其传动比为i=ωS/ωH=1+zR/zS,其中ωS和ωH分别表示太阳轮和行星架的转速,zS和zR分别表示太阳轮和内齿圈的齿数。在内齿圈尺寸一定的情况下,太阳轮越小,传动比越大。受限于齿轮加工工艺,太阳轮尺寸不能无限制缩小,因此单级行星减速器的减速比一般不超过20。
少齿差行星传动虽然也属于行星传动,但输入输出方式却与上述行星减速器不同。其结构简洁却十分精妙,外齿轮的齿廓可以采用渐开线齿廓,也可以采用摆线齿廓,后者更为常见。少齿差行星传动中的内齿圈为固定构件,也是唯一的太阳轮,行星架为输入,行星轮的自转为输出,自由度为1。其传动比也可以通过轮系中经典的反转法求出,即i=ωH/ωP=-zP/(zR-zP)。少齿差的核心在于太阳轮与行星轮的齿数差很小,公式中的zR-zP越接近零,则传动比越大,特殊情况下可达100以上。通过具体实例可让学生直观理解,少齿差可以实现大的减速比,并且行星架和行星轮的转向相反。
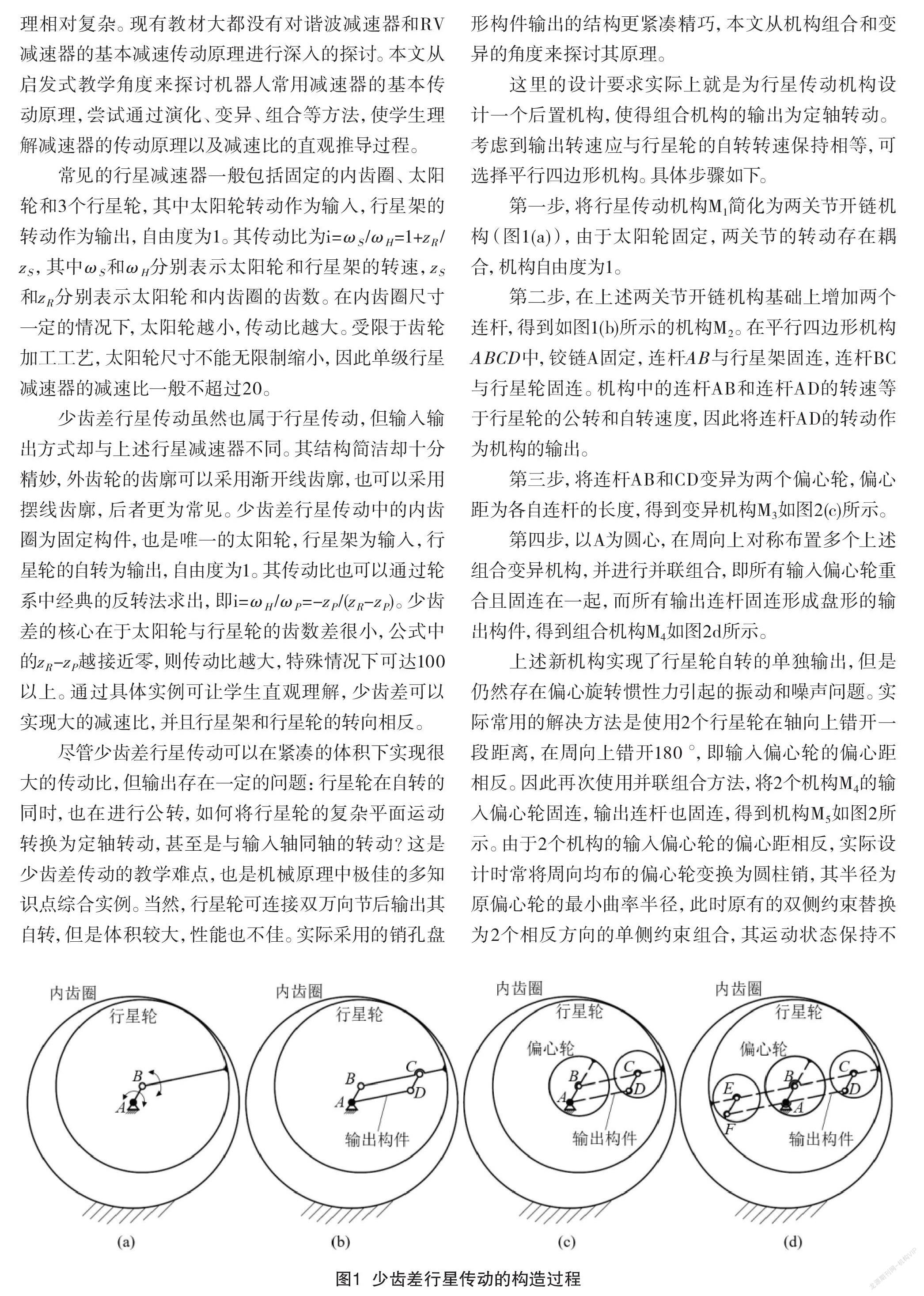
尽管少齿差行星传动可以在紧凑的体积下实现很大的传动比,但输出存在一定的问题:行星轮在自转的同时,也在进行公转,如何将行星轮的复杂平面运动转换为定轴转动,甚至是与输入轴同轴的转动?这是少齿差传动的教学难点,也是机械原理中极佳的多知识点综合实例。当然,行星轮可连接双万向节后输出其自转,但是体积较大,性能也不佳。实际采用的销孔盘形构件输出的结构更紧凑精巧,本文从机构组合和变异的角度来探讨其原理。
这里的设计要求实际上就是为行星传动机构设计一个后置机构,使得组合机构的输出为定轴转动。考虑到输出转速应与行星轮的自转转速保持相等,可选择平行四边形机构。具体步骤如下。
第一步,将行星传动机构M1简化为两关节开链机构(图1(a)),由于太阳轮固定,两关节的转动存在耦合,机构自由度为1。
第二步,在上述两关节开链机构基础上增加两个连杆,得到如图1(b)所示的机构M2。在平行四边形机构ABCD中,铰链A固定,连杆AB与行星架固连,连杆BC与行星轮固连。机构中的连杆AB和连杆AD的转速等于行星轮的公转和自转速度,因此将连杆AD的转动作为机构的输出。
第三步,将连杆AB和CD变异为两个偏心轮,偏心距为各自连杆的长度,得到变异机构M3如图2(c)所示。
第四步,以A为圆心,在周向上对称布置多个上述组合变异机构,并进行并联组合,即所有输入偏心轮重合且固连在一起,而所有输出连杆固连形成盘形的输出构件,得到组合机构M4如图2d所示。
上述新机构实现了行星轮自转的单独输出,但是仍然存在偏心旋转惯性力引起的振动和噪声问题。实际常用的解决方法是使用2个行星轮在轴向上错开一段距离,在周向上错开180。,即输入偏心轮的偏心距相反。因此再次使用并联组合方法,將2个机构M4的输入偏心轮固连,输出连杆也固连,得到机构M5如图2所示。由于2个机构的输入偏心轮的偏心距相反,实际设计时常将周向均布的偏心轮变换为圆柱销,其半径为原偏心轮的最小曲率半径,此时原有的双侧约束替换为2个相反方向的单侧约束组合,其运动状态保持不变。
上述步骤中的一部分可设计为课题讨论题,由学生独立思考和讨论后作答,有利于培养学生灵活运用机械原理知识来解决复杂工程问题的能力,也能够让学生领会实际的机械设计过程并不是简单的知识组合,而需要以目标为导向,结合各种方案的特性,最终有机组合之后形成实用的技术方案。
2 谐波减速器的启发式教学
有了少齿差的传动作为基础,就可以介绍谐波减速器的减速原理。谐波减速器的3个基本部分都可作为固定构件,不妨假定刚轮固定,波发生器输入,柔轮输出。常见的波发生器有3种类型,即凸轮式、滚轮式和偏心盘式。3种类型的运动原理基本相同,这里以滚轮式波发生器为对象来说明谐波减速器的减速原理[5]。
波发生器中的滚轮既有绕中心轴的公转,也有绕自身对称轴的自转,可视为机构中的行星轮。相应的,固定的刚轮可视为太阳轮。行星轮与太阳轮通过柔轮间接发生运动关联。柔轮的运动较为复杂,不仅有绕中心轴的刚体转动,还有局部的柔性变形。这里需要输出其刚体转动。在任意时刻,柔轮的基本形状都是相同的椭圆形。根据其变形和传动方式,可将其等效代换为同步带传动,其带轮即为机构中的行星轮。
在行星架参考系下,柔轮的刚体转动速度等于带的周长除以带的线速度。由于柔轮与刚轮互相啮合,因此两者的线速度相等,而两者的角速度之间的关系如下:
其中zG和zR分别表示刚轮(太阳轮)和柔轮的齿数,ωG和ωR分别表示刚轮和柔轮的转速。进一步整理可得:
传动比与少齿差行星传动的传动比相同,即柔轮可视为与之具有相同齿数的刚性行星轮。
3 RV减速器的启发式教学
RV减速器的原理更加复杂,几乎所有教材都只是说明RV减速器由行星传动的前级和摆线针轮传动的后级组成,而这两级传动之间的连接方式缺乏详细描述。这导致学生在没有少齿差传动基础知识的情况下,难以理解RV减速器的运动原理,甚至面对RV减速器实物时也分不清输入端和输出端。因此,这一部分的知识要求仅仅停留在基本概念上,难以让学生理解到二维减速器的精妙结构,以及RV减速器的制造难点。实际上,有了少齿差传动作为基础,RV减速器同样可通过简单机构组合而成,传动比计算公式也可以很方便推导得到[7-8]。
RV减速器在少齿差行星传动级之前增加了1个行星传动级。为了更清晰的阐述其运动关系,这里考虑前级仅包含1个太阳轮和2个周向均布行星轮,其输入为太阳轮,输出为行星轮的自转和公转。由于机构在确定的输入下不能给出确定的输出,难以直接定义其传动比。
根据齿轮传动性质可知,2个行星轮的自转和公转速度都相等,这里将其代换为两自由度平行四边形机构,如图3所示。其中行星轮代换为连杆PQ和MN,行星架代换为连杆MQ;行星轮的自转和公转即为MN和MQ的转动。
不难发现,这个两自由度平行四边形机构PQMN与少齿差行星传动中的平行四边形机构CDFE相同。因此,如果把前级的行星轮与后级的偏心轮固连,作为后置少齿差行星传动级的输入,其运动是相容的。而后置传动级的输出则为周向偏心轮转轴组成的盘形构件的转动,即前级的公转运动。
总结,是用1个单自由度机构来封闭两自由度机构的2个输出,得到1个单自由度机构。其传动比可以结合前后两级行星传动方程、各连杆之间的固连关系方程求解,可得传动比为:
其中ωs1和ωh1分别为输入和输出角速度,zp1、zs1、zp2、zr2。分别表示前级中的行星轮和太阳轮齿数以及后级中的行星轮和内齿圈齿数。若少齿差行星传动的齿数差为1,则传动比可简化为1+zr2zp1/zs1。由于zs1显著小于zr2,因此RV减速器的减速比大于同样情况的少齿差行星传动。
4 结语
由上述讨论可知,机器人常用的减速器尽管采用的都是齿轮传动,但其原理大有不同,而性能差异可从其结构中体现。减速器中涉及了机械原理的多个知识点,可以让学生把之前学到的知识有效的串联起来,是非常难得的机械综合创新设计实例。其中的重点是齿轮机构、平行四边形机构、偏心轮机构之间的等效代换,可以给学生以创新的启迪。
参考文献
[1] 王东署,朱训林.工业机器人技术与应用[M].北京:中国电力出版社,2016.
[2] 刘朝华,杨雪翠,石秀敏,等.《工业机器人机械结构与维护》课程设计与实施[J].课程教育研究, 2017(31):31-32.
[3] 龚仲华.工业机器人从入门到应用[M].北京:机械工业出版社,2016.
[4] 张俊,张策,宋轶民.少齿差环板式减速器研究状况评述[J].中国机械工程,2006(z1):429-433.
[5] SHI Z,LI Y, LIU G.Adaptive torque estimation of robot joint with harmonic drive transmission[J]. Mechanical Systems and Signal Processing,2017 (96):1-15.
[6] 何卫东,李力行,李欣.机器人用高精度RV减速器中摆线轮的优化新齿形[J].机械工程学报,2000, 36(3):51-55.
[7] 吴素珍.精密摆线减速器传动性能优化与试验研究[D].大连:大连交通大学,2019.
[8] 雷明伟,史文谱,骆凯,等.机器人用RV减速器虚拟样机构建及针齿状态分析[J].科技资讯,2018, 16(3):101-103.
