基于无人机图像的斜坡精细地形建模及精度分析
2021-12-02漆首令
漆首令
(广西有色勘察设计研究院,广西 南宁 530031)
1 引言
世界各地的山区往往地质构造复杂、地形起伏大、降水集中,容易造成滑坡地质灾害[1,2]。进入21 世纪,随着全球气候和环境的急剧变化,滑坡灾害发生的频率和强度越来越高。此外,由于人口的增加和大规模经济活动向山区扩展,滑坡灾害造成的损失日益严重[3,4]。
边坡稳定性分析和建模是预测滑坡并降低灾害影响的有效方法,传统方法以人工现场测量[2]为主,然而,受滑坡灾害影响现场通信和交通中断,人工开展地面测量费时费力,获得的地形数据分辨率较低,在高海拔地区的边坡稳定性分析和建模工作中,边坡地形往往被简化处理。但是,边坡稳定性分析的准确性对于预测滑坡灾害至关重要,因此,探索一种成本低、适应性强的快速精细建模方法具有重要的现实意义。
与传统的人工测量方法相比,无人机航测系统具有图像分辨率高、数据实时传输、适合高风险区域作业、成本低、机动灵活等优点,适应低空高分辨率遥感数据的采集。因此,无人机测量系统逐渐成为一种重要的空间数据采集方法,并已成功应用于多个领域,如森林资源清查、桥梁健康监测和电力线检查等。
本文主要是利用无人机获得研究区域的数字高程模型和高密度点云,并评估其准确性[5],为地形建模提供了一种新的思路和方法。主要工作包括 :(1)结合无人机航测图像和地面控制点(GCP)坐标,生成测量区域高密度点云的高精度数字表面模型(DSM)。(2)使用预设检查点坐标评估DSM 的精度。(3)使用地面激光扫描仪(TLS)获得的数据评估高密度点云的精度。
2 数据采集
该研究在广西圣堂山附近公路河谷地带进行,海拔约1430m。早期的野外勘探发现该地区有一个不稳定的斜坡,斜坡后缘出现的拉伸裂缝如图1 所示。
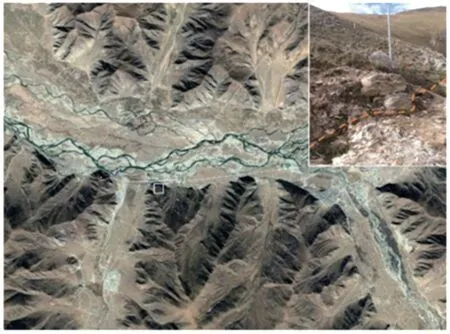
图1 斜坡后缘出现的拉伸裂缝
在研究区域共采集无人机影像、扫描点云数据和RTK 控制点坐标等3 类数据。本次采用蜻蜓5S 多旋翼无人机,飞行时长(含最大任务载荷)为45min。搭载蜻蜓航空摄影仪,航摄仪具体参数如表1 所示。
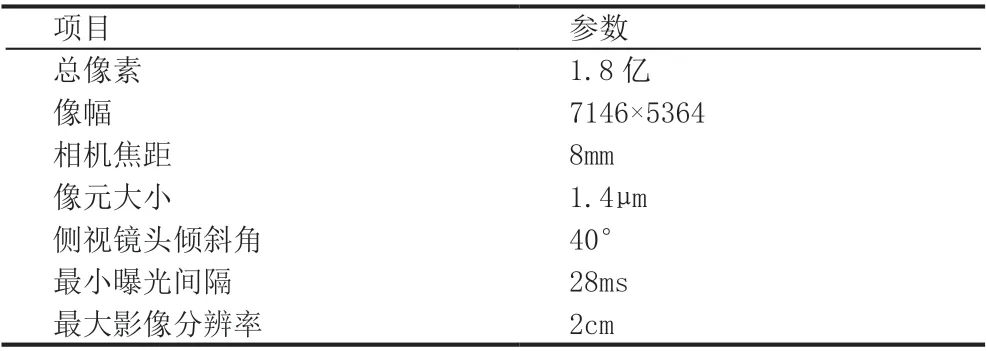
表1 航摄仪具体参数
测区面积约1.7km2。高差约50m,地形为丘陵,无高山,无高大建筑物,飞行空域良好。本次设计相对航高457m,航向重叠度80%,旁向重叠度60%,航线间距198m,航向拍照间距74m,像片地面分辨率8cm,本测区共飞行4 架次,获取0.08m 分辨率的倾斜摄影影像1015 张。
本次像控点采用区域网布点方式,基本按照400m~500m间距布设1个像控点,共布置15个像控点,其中10 个像控点参与平差计算,5 个像控点用作检查点。使用RTK系统(Hi-Target iRTK5)测量像控点坐标,GCP 测量值平面精度为8mm。无人机路线如图2 所示。

图2 无人机(UAV)路线
使用TLS(HS500i)获取了真实坡面上的高密度点云数据,以评估基于无人机获取的点云。TLS 的最大射程为500 米,测距精度为5 毫米。用于获取野外三维(3D)点云的地面激光扫描仪(TLS)如图3 所示。

图3 地面激光扫描仪(TLS)
3 技术流程
基于无人机的航空摄影测量有5 个步骤:飞行准备、图像采集、数据检查、数据处理和输出。获取原始数据后,进行分析提取并匹配特征点,然后进行空中三角测量。确认空中三角测量结果满足精度要求后,即可输出结果。主要步骤如图4 所示。
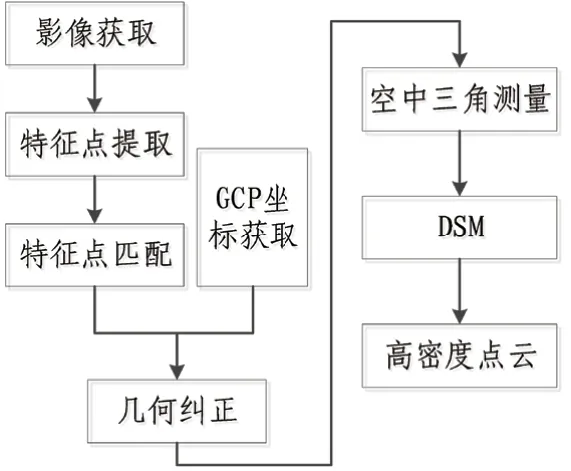
图4 生成数字表面模型(DSM)和高密度点云流程
4 精度分析
表2 列出了水平和垂直方向5 个检查点的绝对误差值。水平和垂直方向的平均误差分别为0.096 和0.266m。结果表明,DSM 在水平方向比在垂直方向精确。
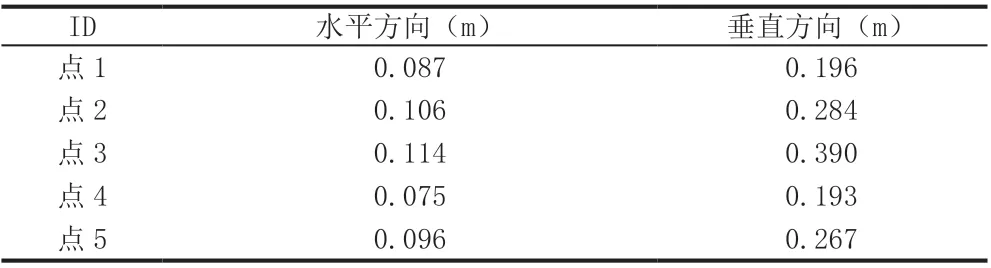
表2 检查点错误的绝对值
用TLS 获得的点云数据(用作实际值的近似值)评估从UAV 图像获得的点云精度。从两类点云数据中选5个不同的特征点,测量每组点之间的距离(如图5所示),计算基于无人机点云数据的绝对误差值和误差率。
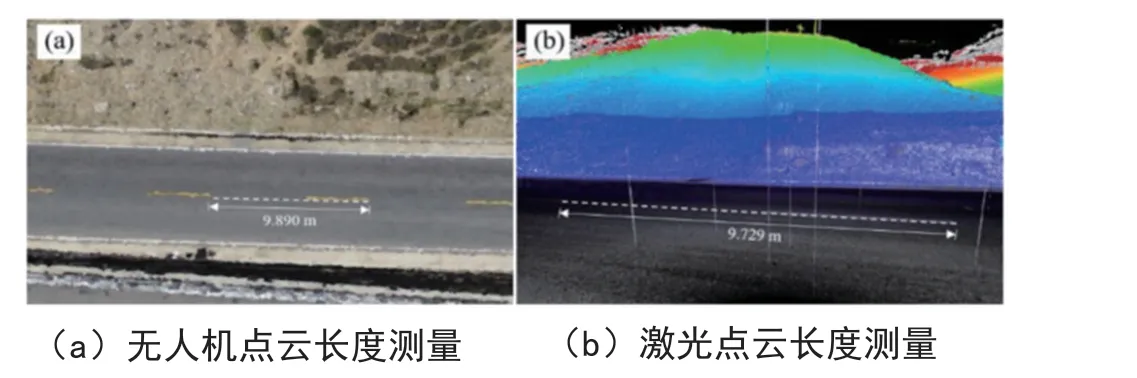
图5 测量特征点之间距离的方法
表3 列出两类点云数据中5 组特征点之间的距离结果。从UAV图像收集的点云数据与TLS几乎没有差异。它们之间的误差约为分米,平均绝对误差为0.230 米。
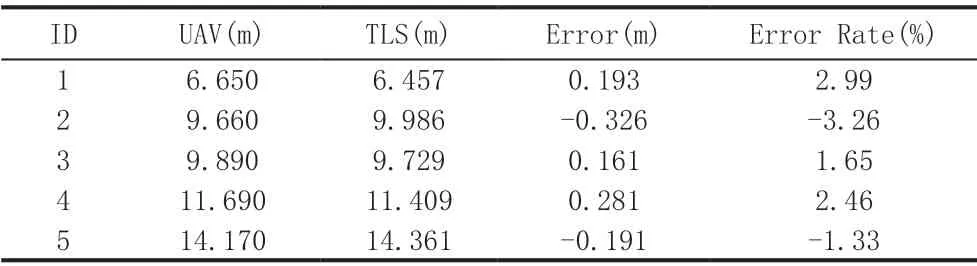
表3 无人机和TLS点云数据对比
5 结语
精度分析结果表明,DSM 的平均误差为0.266m,点云数据的平均误差为0.230m,因此,该研究可为类似边坡数据采集工程提供准确获取边坡表面信息的参考方法。无人机航摄作为一种快速获取高海拔地区边坡数据的方法,在滑坡应急监测领域具有较高的实际应用价值,但模型精度还亟待提高。