基于小波变换与RBF神经网络的GNSS水汽值预测研究
2021-12-01刘备任栋
刘 备 任 栋
1 海军工程大学导航工程教研室,武汉市解放大道717号, 430033 2 广西空间信息与测绘重点实验室,桂林市雁山街319号, 541006 3 中国科学院精密测量科学与技术创新研究院大地测量与地球动力学国家重点实验室,武汉市徐东大街340号,430077 4 中国科学院大学,北京市玉泉路19号甲,100049
水汽的实时分布以及预测在监测中小尺度灾害性天气方面具有重要意义[1]。但常规的水汽获取手段具有局限性,例如无线电探测法虽然精度高,但时间分辨率较低[2]。利用GNSS技术反演水汽的精度可以满足降水预报要求,且成本低、时空分辨率高[3]。
小波变换方法能够降低水汽中各种干扰对预测结果的影响,而RBF神经网络在时间序列预测中的应用效果优于其他神经网络模型[4]。本文利用小波变化与RBF神经网络相结合的方法开展河北省GNSS水汽值预测研究。
1 数据与方法
1.1 站点分布
选取河北省24个CORS站的数据进行分析,站点分布如图1所示。
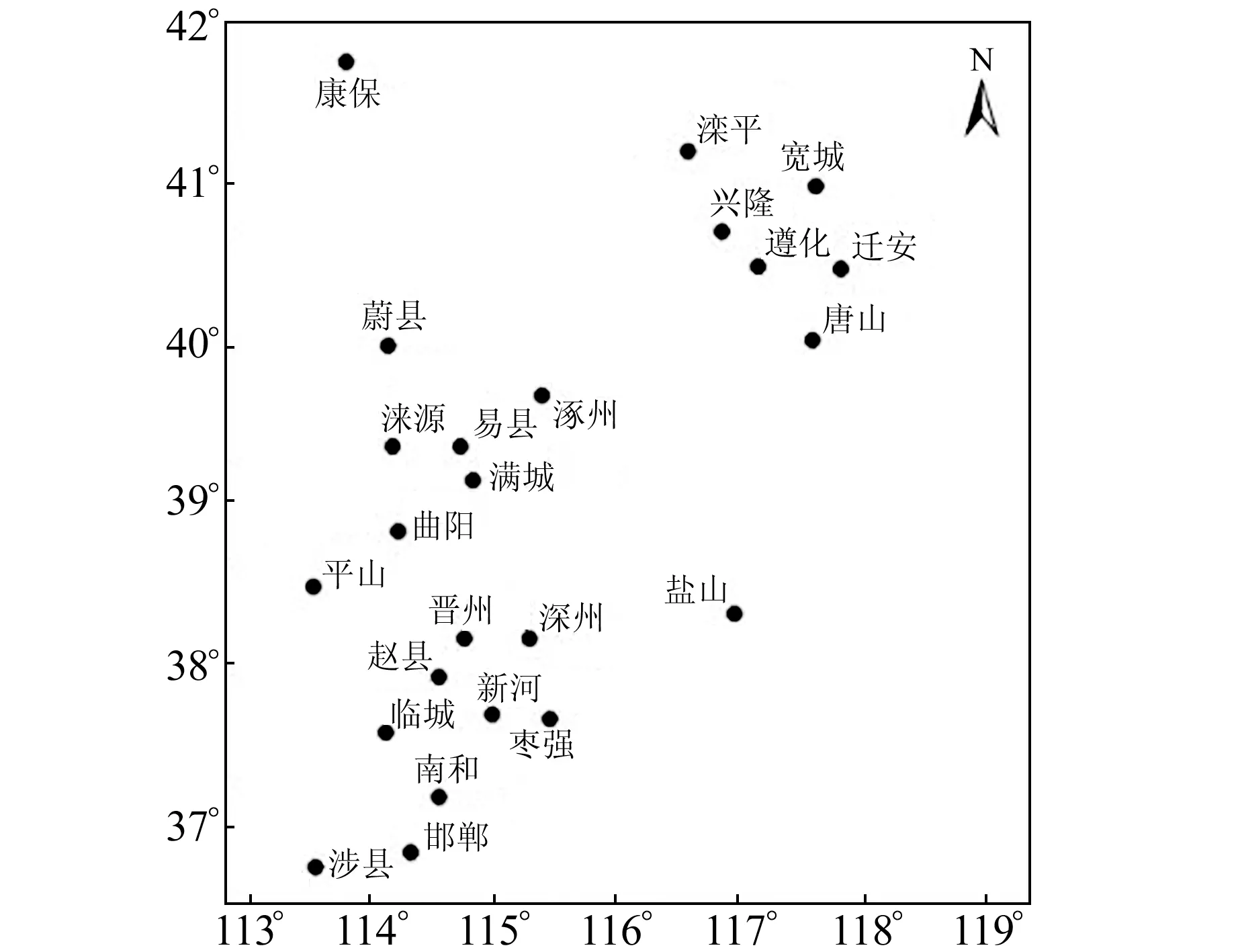
图1 站点分布Fig.1 Distribution of the stations
1.2 小波变换理论
小波变换是针对傅里叶变换的不足而发展起来的,其具有多分辨率的特性,常用的小波函数有Haar小波、Daubechies小波、Symlets小波、Meyer小波和Mexican-hat小波等。小波变换时需根据信号特征来选择小波基,考虑到GNSS水汽值变化的特征,本文最终选择dbN小波系[5]。
1.3 RBF神经网络
RBF神经网络是一种3层前向网络:第1层是输入层,为信号源节点;第2层是隐含层,隐单元的变换函数为局部分析的非线性函数,隐单元数根据所描述问题的需要来确定;第3层是输出层,输出的是隐单元的线性加权[6]。
1.4 GNSS水汽值计算
本文研究的GNSS水汽值时间跨度为2014-06-16~30,由河北省GNSS CORS观测数据反演获得。解算方案如下:解算软件为GAMIT 10.4,星历为IGS精密星历,解算方式为Relax模式,卫星截止高度角10°,引入同期国内IGS站点WUHN、LHAZ、URUM、SHAO等数据联合解算,站点天顶对流层延迟的解算为每小时估算1个值,结合站点气象观测数据可以获得24个GNSS站点时值水汽值,单位为mm。
2 基于小波变换与RBF神经网络的GNSS水汽值预测
基于小波变换与RBF神经网络的GNSS水汽值预测的过程如下:
1)用db5小波基对各GNSS站点的水汽序列进行小波分解,分解层数为8层,分解后得到高频项与低频项。预测样本数据为2014-06-16~30的GNSS-PWV时值数据,共360个。
2)使用RBF神经网络进行预测实验时,按输入数据的不同分为3种预测类型:未进行小波变换的原始数据的预测、小波变换后的低频项的预测以及高低频系数重构后的预测。由于水汽存在半日周期及日周期的变化[7-8],同时考虑到训练样本的需求及数据长度,选择3 d共计72个点作为输入,输出则为12个神经元,样本点为360个,形成277组样本,前180组为训练样本,181~260组为内符合精度检验样本,261~277组为外符合精度检验样本。预测过程中,对于不同的原始数据设置不同的spread参数,以达到最佳的预测效果。
3)对预测后的小波高频系数和低频系数进行重构,得到GNSS水汽值预测序列。
3 预测结果分析
为了检验本文方法用于GNSS-PWV预测的可靠性,计算277组样本后10组数据RBF神经网络预测值、本文方法预测值与GNSS水汽实测值的均方根误差和绝对值误差,结果见表1。
由表1可以看出,直接采用RBF神经网络进行预测的PWV的精度低于经过小波变换后再预测的PWV的精度,并且不同站点之间的精度相差较大。
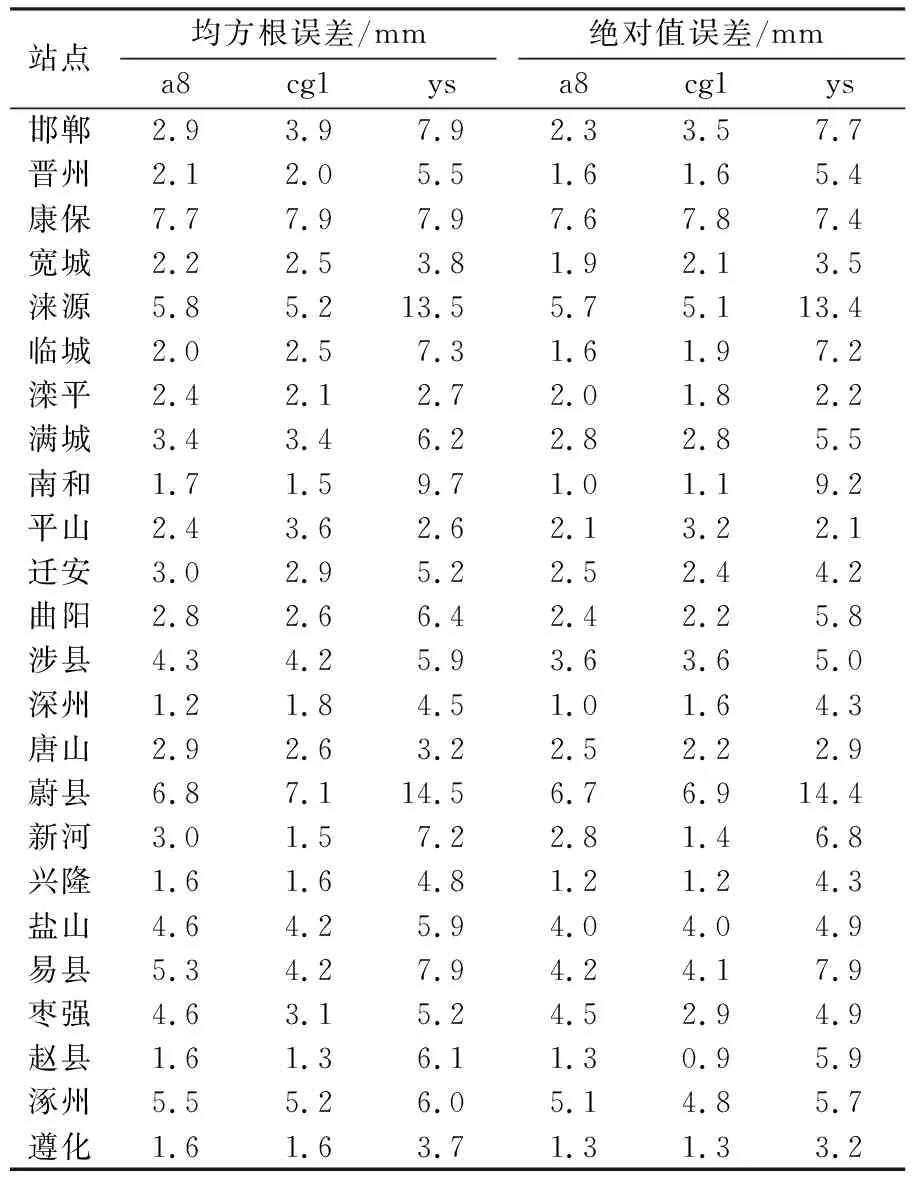
表1 RBF神经网络预测值、小波变换结合RBF神经网络预测值与GNSS水汽实测值的均方根误差、绝对值误差统计
图2为深州站和蔚县站RBF神经网络预测的GNSS水汽值、小波变换结合RBF神经网络预测的GNSS水汽值与GNSS水汽实测值的比较,图中,a8预测和a8&d8预测分别为小波变换后的低频预测值和高低频系数重构后的预测值。
从图2可以看出,直接采用RBF神经网络预测的GNSS水汽值变化趋势和GNSS水汽实测值较为一致,但数值相差较大;小波变换与RBF神经网络结合预测的GNSS水汽值较为接近实测水汽值,但预测结果的精度随着预测时长的增加而降低。
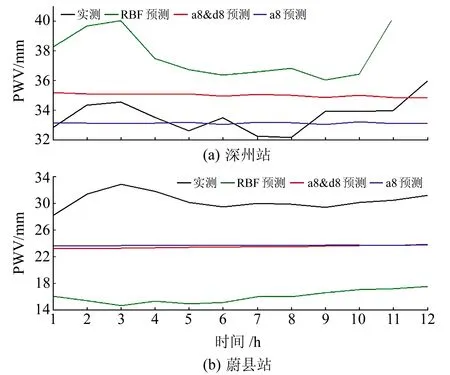
图2 RBF神经网络预测值、小波变换结合RBF神经网络预测值与GNSS水汽实测值Fig.2 The comparison among the prediction values ofGNSS-PWV with RBF neural network, wavelet transform and RBF neural network and measured GNSS-PWV values
4 结 语
本文以河北省为研究区域,利用小波变换与RBF神经网络相结合的方法开展GNSS水汽值的预测研究。实验表明,本文方法预测的GNSS水汽值比单一RBF神经网络预测的GNSS水汽值更接近实测GNSS水汽值,但本文方法预测结果的精度随着预测时长的增加而降低。
