基于无线激光通信系统的信标光中心检测误差评价方法
2021-12-01徐勤健
徐勤健,贾 蕴
(山东航天电子技术研究所,山东 烟台 264003)
0 引言
星间激光通信作为新型的通信方式,具有大带宽、高速率等优越性能。激光束具有传输距离远且宽度窄的特性,因此对于激光通信系统来说,捕获、跟踪和瞄准就显得格外重要。其中,信标光中心检测模块是3个阶段中不可或缺的部分,也就是说,光斑中心的精度可以直接影响或者反映系统的精度[1]。空间激光通信设备采用信标光来标识各自的位置,在空间通信的链路中,速度快且准确性高的信标光捕获的重要性不言而喻。其中,光学传感器的作用是能够实时、精确的确定光斑的中心。空间激光通信终端通常采用CCD、CMOS、SWIR等成像探测器作为光电探测元器件,但是由于元器件本身的非线性、背景暗电平、读出噪声以及随机光子起伏等,可能会造成光斑图像的分布不均匀、边缘模糊等问题。上述现象会造成不同的光斑检测算法输出的光斑坐标有较大的偏差,不同的光斑坐标值会导致激光通信终端接收到的信号光强度偏差很大。
激光通信系统中的捕获、跟踪、瞄准是由短波红外相机的位置来确定的,因此光斑位置的准确性会直接影响激光通信系统的精度。对于光斑中心的计算,质心法、Hough变换法和圆拟合法在工程应用层面来说适用较广。文献[2]提出以Hough变换理论为基础的光斑中心检测方法,实验表明该方法对提高大型三维曲面测量精度有效;以最小二乘原理[3]作为依据,文献[4]提出了圆拟合算法,该算法实时性好,但前提是图像较为理想,否则可能会影响准确性。文献[5]提出了一种经过改良后的圆拟合算法,对中值法和阈值法进行了结合,该算法在寻找光斑中心方面非常准确,但迭代次数较多;传统质心算法也有不同方式的改进,这些研究人员使用适当的比较和方法来确定光斑位置,这提高了激光检测的准确性。
在评价光斑位置检测方法方面,文献[6]提出了利用以互补金属氧化物半导体为材料的探测器进行光斑处理方法的对比评价,这种方法的提出使不同的滤波算法对光斑中心的影响进行了数字化说明。基于Xilinx Spartan3 FPGA 的2片式硬件平台设计方案,不仅保证了目标位置信息检索的实时性能,而且兼顾简化系统,提高其经济性。文献[7]分析了红外成像系统的3种结构形式,分别为折射一次成像型、折反射型和折射二次成像型,并设计了由透镜、外加头罩和分光棱镜组成的红外光学系统。文献[8]提出了一种由信标光发射单元、信标光接收单元、转台和激光告警器组成的全光捕获试验装置,并在对全光捕获技术的理论分析中指出,在不确定区域扫描的模式有光栅扫描、螺旋扫描、螺旋光栅扫描、李萨如形扫描和玫瑰形扫描等。
传统的光斑中心计算误差判定方法仅依赖图像本身,并且与实际应用环境的耦合度较低,缺少客观的评价标准。常用的光斑中心计算误差判定方法是:首先采用同一位置的同一光斑多次拍摄采样图片计算求取均值的方法来近似测量真实光斑中心位置,然后以此位置坐标与不同光斑中心算法的结果之间的差值来评判不同算法的误差情况及性能的优劣。因此,本文提出一种光斑中心准确度的评价方法,用以弥补传统方法的不足。本文首先构建一个信标光中心光斑计算准确度评价系统,通过系统标定寻求信噪比最大点作为基准,对质心法、Hough变换法以及圆拟合法3种方法计算得到的光斑中心坐标进行比较,通过均方根差的大小和系统中计算坐标结果对应耦合功率来判定计算结果的准确度。
1 信标光中心光斑计算准确度评价系统
信标光中心光斑计算准确度的评价依赖于激光通信光学天线系统,其组成如图1所示。该系统主要由3部分组成:主望远镜、信号光接收支路、信标光接收支路(含成像探测器),其中,光路由压电陶瓷偏转镜反射。
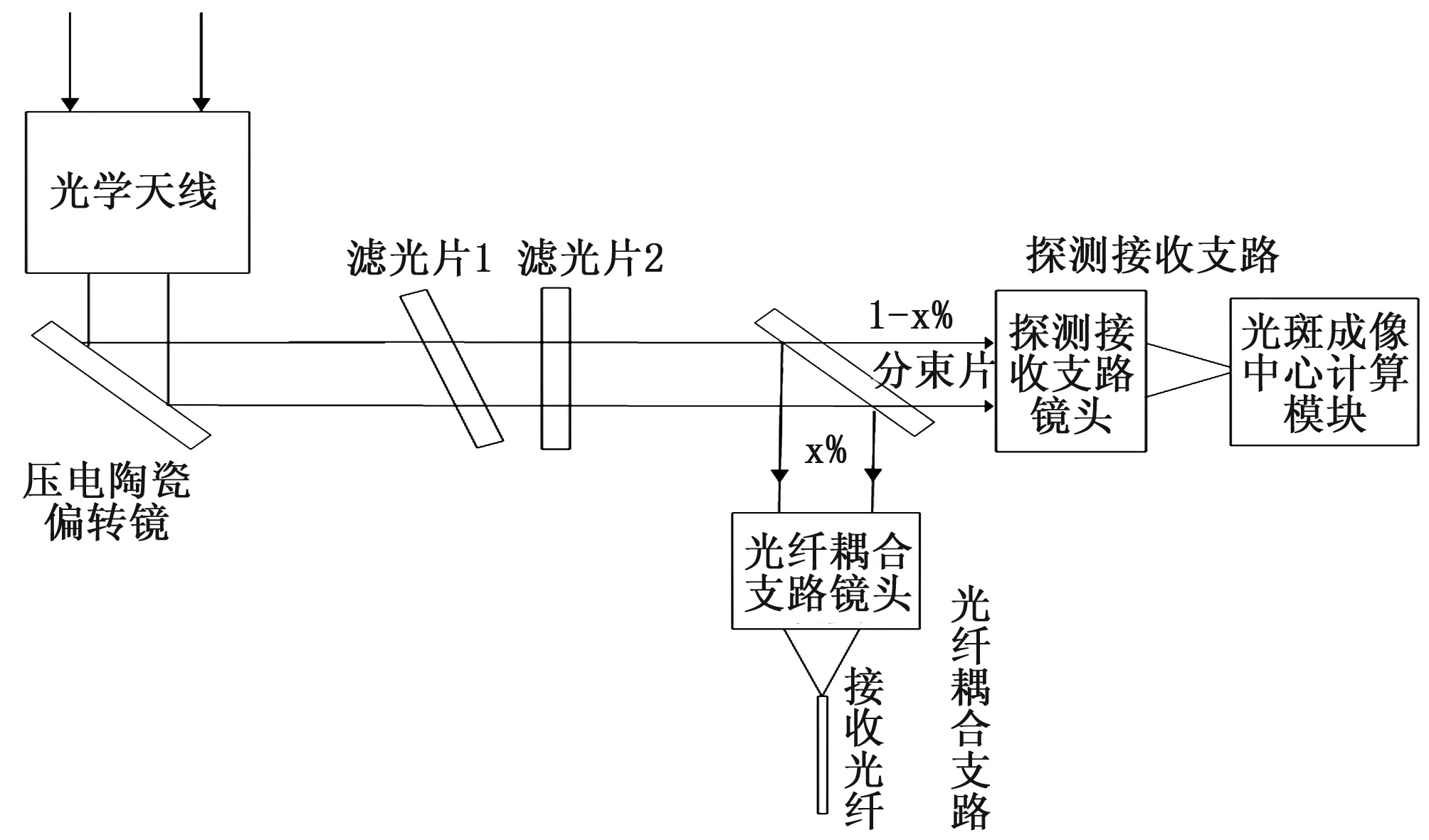
图1 激光通信天线子系统
信号接收支路:信号接收支路接收的信号光聚焦接收,其接收光束可认为时平行光,接收系统需要计算耦合效率和系统的信噪比(SNR)。
信标接收支路:信标接收支路接收的信号光聚焦在光电转换成像探测器靶面上,其接收光束也可认为时平行光,最终光斑的形状需要覆盖大于4×4个像元尺寸,来保证算法细分精度。
如图1所示,信号发射支路将激光进行准直,并通过光学天线发射出去,这一过程需要重点考虑其远场发散角。激光通过压电陶瓷偏转镜和滤光片之后,通过分束片,将激光光束的x%分给信号接收支路,接收光束可认为是平行光,剩余1-x%分给信标接收支路,其接收的信标光聚焦在探测器靶面上,以此系统为基础来评价光斑中心检测算法的准确性。
首先,构建不同算法的误差评价基准依据。在暗场条件下,调整激光器光源强度,使其尽可能呈现较为清晰、标准的圆形光斑,且服从高斯分布,记录基准值。
接下来,构建信标光系统真实运行环境,分别采用质心法、Hough变换法和圆拟合法依次计算出圆心坐标值,记为P1(x1,y1)、P2(x2,y2)和P3(x3,y3)。
记误差为σ,采用均方根误差[9]的方法,多次测量光斑质心的误差为:
(1)
(2)
(3)
2 光斑中心算法
中心检测的算法主要有3种:质心法[10]、Hough变换法[11]、圆拟合法[12]。下面对3种方法进行介绍。
质心法常常用于形状规则、对称性好的图片或形状的中心检测[13]。质心法的本质是通过计算一阶矩阵进而确定光斑中心。由于信标光是激光,其能量符合高斯分布,对于一个图形来说,其能量最大点被看作是图像的中心。设光斑成像的大小为M×N个像元,利用质心法计算得到的光斑中心(X,Y)表示为:
(4)
(5)
Hough圆变换是由直线变换拓展而来[14]。Hough变换的原理是将图像中所有的点带入进行计算,将结果进行投票。当投票结果大于阈值时,则认为这个曲线上的存在足够多的有效点。
利用圆拟合[15]的方法来检测光斑的中心位置,是基于最小二乘法,利用一个标准圆来尽量接近所测得的光斑,以得到一个标准光斑,利用所得到的圆来计算其半径和圆心坐标,将其看做原光斑的中心位置。
对于原始图像,本文将分别采用质心法、Hough变换法和圆拟合法3种方法对光斑中心进行计算。因原始图像存在盲原、光斑图像不呈现标准高斯分布以及图像边缘不平整等问题,因此都需要先进行滤波处理,对于霍夫变换和圆拟合方法,还需要进行自适应阈值处理和Sobel边缘检测。利用上述3种方法进行Matlab仿真。
质心法对于较为经典简洁,且硬件要求低[16],Hough变换法鲁棒性高[17],圆拟合通过构建标准圆形光斑不断缩小与原图像的差别,可以计算出图像的光斑中心和半径[18]。
3 光斑中心评价方法的具体实现
3.1 激光通信子系统光斑位置标定
在进行不同的光斑检测算法仿真之前,首先要制定评价的基准依据。
在暗场环境下,调整激光器光源强度,使成像探测器能清晰成像,输出的光斑图像为近似理想的圆形光斑、服从高斯分布。在该条件下,不同光斑中心计算方法获得的中心坐标之间的差值小于0.01个像元,该误差对激光通信系统的误差可以忽略不计。
驱动压电陶瓷偏转镜,使光斑在成像探测器靶面上以螺旋曲线方式运动,每次运动角度为:
θ=180×rad/π
(6)
则在成像探测器靶面上,光斑坐标应该平移距离为:
Δl1=f×tanθ
(7)
其中:f为光学系统焦距。光斑螺旋曲线行程图如图2所示。
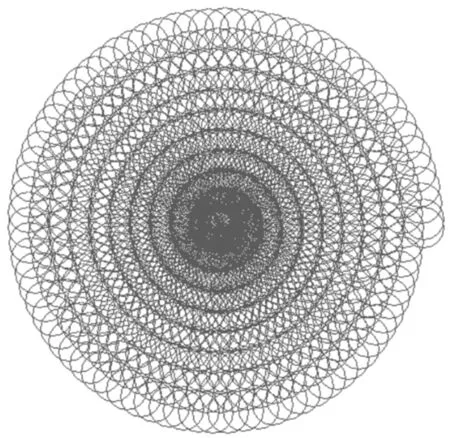
图2 光斑螺旋曲线行程图

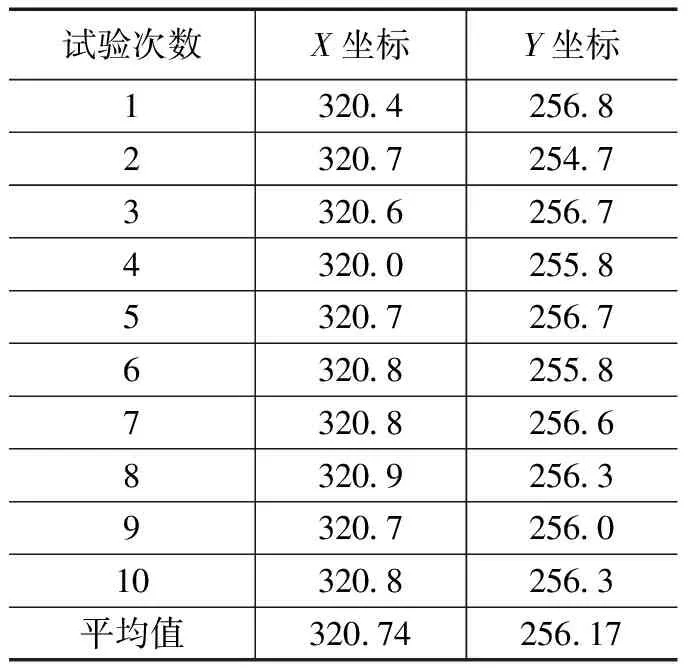
表1 光纤耦合功率最大点坐标

3.2 图像预处理
采用1 550 nm激光器作为光源,InGaAs焦平面探测器(SWIR)作为成像探测器。在信标光系统真实运行环境中,保持标定过程的光路不变。
在农作物的生长过程中,最常遇到的问题就是病虫害的入侵,因此人们时常为了有效地预防病虫害或者治疗病虫害而使用各式各样的农药,但是这样一来往往会造成过度使用农药或用药不合理,不仅会对农作物的生长造成极其不利的影响,还会使得土壤也受到相应的污染,同时农作物产品的整体质量也会受到一定的影响。
本次使用探测器为山西国惠InGaAs短波红外探测器,试验所得原图像分辨率为640×512,像元尺寸为15 μm×15 μm,像素可操作率大于99.5%,由观测实际输出原图像可知,盲元数量小于100。
由原图像分析,除了存在光斑形状不规则的问题外,还有噪声干扰以及像素值不单一等问题,因此在进行不同光斑定位算法之前,要首先进行图像的预处理。为了便于展示,将原图像进行截取,截取矩形大小为124×120,左上角坐标值为(266,194),如图3所示。
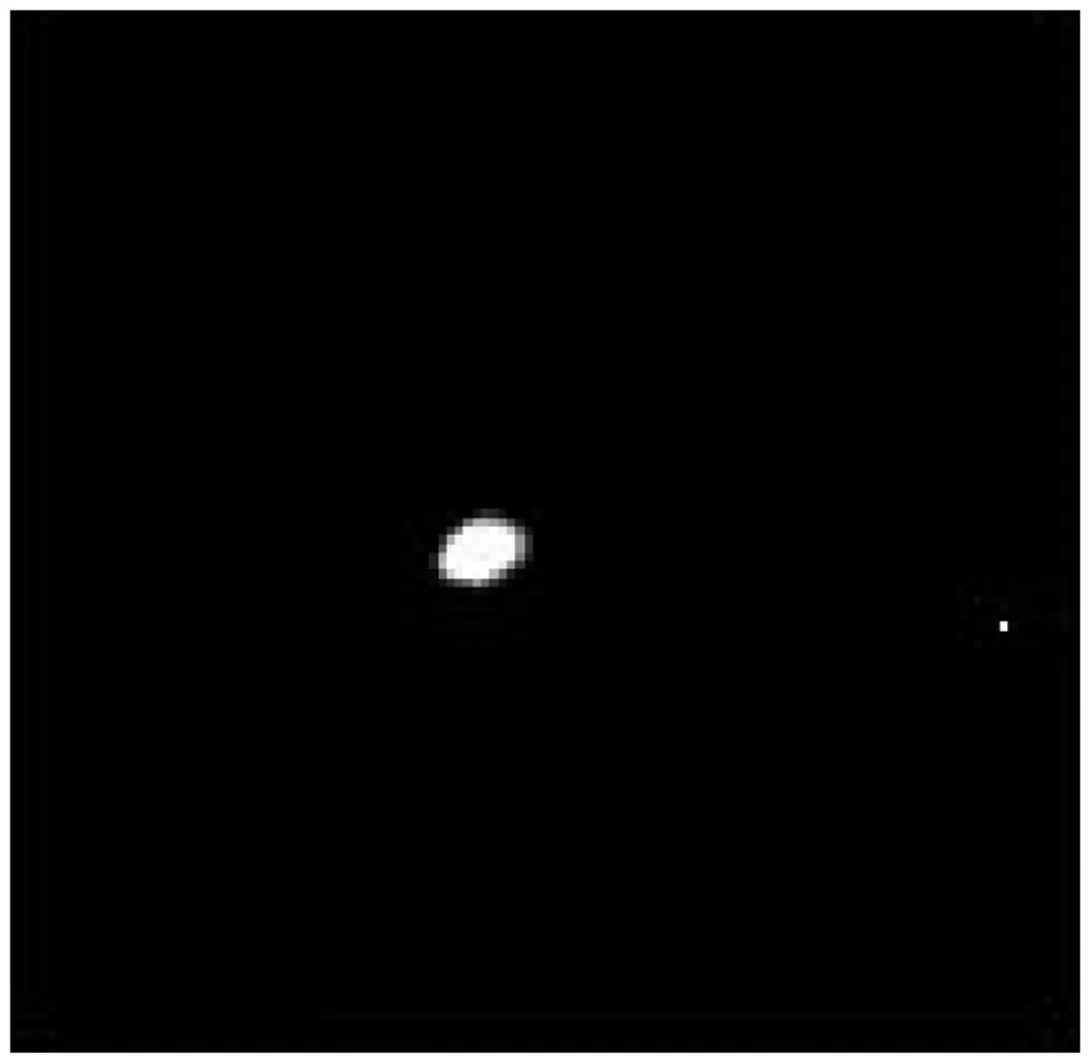
图3 真实运行环境中光斑截取图像
3.2.1 图像滤波
红外成像系统利用一个图像内包含的不同物体的辐射不同构成图像[19]。它的优点是分辨率和灵敏度较高,但同时存在着系统噪声和非目标物体的背景干扰。若想得到较好的图像结果,需要对图像进行一定的处理。
利用激光天线子系统得到的红外图像具有一定的噪声,这些噪声的存在会造成计算光斑中心时的误差,使得计算结果有明显偏差。此时利用滤波器进行滤波,能够有效改善这种情况。
中值滤波[20]的原理是在窗口范围内,将图像内的像素点的灰度值按照一定顺序将数据进行排序,并选择中间值作为该窗口的输出值。这种方法本质上是排序统计。由于其特性是取中间值,因此对随机的孤点噪声的效果较好。经验证,在选择窗口大小时,当M=N=3时,对噪声的过滤效果较好。滤波前后灰度值对比图如图4所示。

图4 滤波前后灰度值对比图
3.2.2 自适应阈值分割
二值化阈值变换的函数表达式如下:

(8)
将滤波后的图像读入Matlab,进行自适应阈值分割处理[21],程序仿真结果可得,该图像的阈值为109,因此有:

(9)
4 光斑检测定位算法仿真结果分析
用于评价光斑中心检测准确度的激光天线子系统实物搭建如图5所示。箭头所示为平行光入射方向,D为分光镜,平行光的x%进入信号接收支路A,剩余1-x%进入信标接收支路B,聚焦在探测器靶面C上。
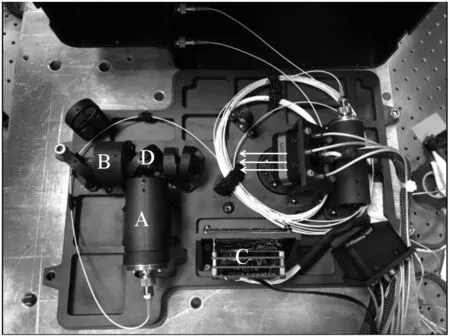
图5 激光天线子系统实物搭建
采用1 550 nm激光器作为光源,InGaAs焦平面探测器(SWIR)作为成像探测器。实验室环境温度为27 ℃,测试方法如下:
1)开启1 550 nm发射激光器,将发射激光器光束经过准直透镜,衰减片,入射精瞄镜后反射,并经过聚焦透镜在SWIR探测器上获得光斑,调整SWIR前后距离,使得SWIR上光斑曝光尺寸约为6像素;
2)精确测量压电陶瓷偏转镜中心到SWIR光敏面距离,该距离为d,误差小于1 mm。
3)控制压电陶瓷偏转镜在此位置上分别向2个方向上进行角位置运动,经过换算每次运动角度为θ,则SWIR位置应该平移距离为d×θ;
4)同时读取SWIR输出的光斑位置变化,记录并观察坐标与耦合功率。
5)改变程序中的光斑中心计算方法,并记录计算所得坐标以及对应耦合功率。
首先采用质心法进行计算。记录测量当前环境的温度和湿度,根据成像探测器感光波段选用对应的激光光源,选用滤光片,减少杂光,并保证光路与标定过程中描述情况一致。微调镜头焦距,使光斑能够清晰成像于探测器靶面。通过程序计算得出坐标值P1(x1,y1)。
将光斑中心计算方法改为Hough变换法和圆拟合法,在相同的温度和湿度条件下,重复上述过程并记录P2(x2,y2)、P3(x3,y3)。
为排除误差变化规律出现的偶然性,需多次测量取平均并进行比较;此外,改变激光光源的入射角度,使光斑在成像探测器靶面上的位置偏移,再次重复标校和光斑计算过程。
经过上述过程,记录下的程序仿真的结果坐标数据如表2所示,并计算其均方根误差。
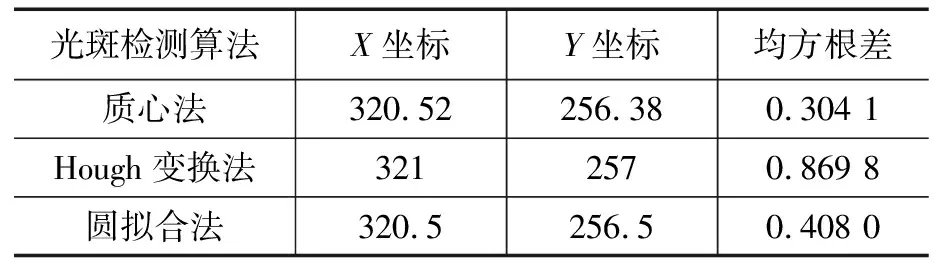
表2 光斑检测算法坐标及均方根差
将上述坐标值代入该评价系统,记录不同光斑检测算法坐标计算值对应的光纤耦合功率如表3所示。
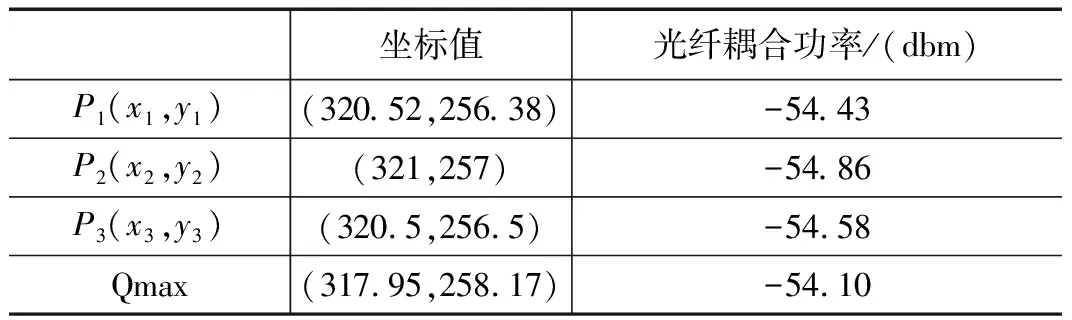
表3 坐标对应耦合功率
对表2与表3结果进行归纳,本文所选取的标校坐标Qmax为(317.95,258.17),该点的光纤耦合功率为-54.10 dbm。利用质心法计算得到的圆心坐标P1为(320.52,256.38),均方根差为0.304 1,该点的光纤耦合功率为-54.43 dbm;利用Hough变换法得到的圆心坐标P2为(321,257),均方根差为0.869 8,该点的光纤耦合功率为-54.86 dbm;利用圆拟合法计算得到的圆心坐标P3为(320.5,256.5),均方根差为0.408 0,该点的光纤耦合功率为-54.58 dbm。综上所述,在本文所述的实验环境和条件下,质心法准确性较高。
5 结束语
本文提出了一种依靠激光通信天线子系统的光斑中心计算准确度的评价方法,该方法首先构建了一个信标光中心准确度评价系统,再通过标校制定评价标准的依据,根据不同光斑中心算法的仿真结果可知,质心法、Hough变换法和圆拟合法得到的光斑中心坐标的均方根差分别为0.304 1、0.869 8、0.408 0,因此在本文所述的实验环境和条件下,质心法准确度较高。选择一种合适的光斑检测算法有助于提高光斑检测的精度,进一步影响APT系统的准确性,对于提高星间通信的可靠性有一定的帮助。本文所述方法适用于激光通信系统中光斑中心算法的评价与选择,也可以用于评价不同滤波算法、非均匀校正及增强、亚像素定位等图像预处理算法对光斑中心计算结果的影响,为信标光检测单元的设计提供具有工程应用价值的参考。
