基于贝叶斯决策的无人机飞行路径自动规划方法
2021-12-01张云飞
张云飞
(河海大学 计算机与信息学院, 南京 211100)
0 引言
无人机利用无线电遥控设备和控制装置操纵,应用于民用和军事,能够解决人类无法解决的难题。考虑到无人机自身的特殊性,特别是面对战争威胁时,如何快速、准确地确定最佳航路,是保证在日益复杂、多变的现代战场环境下,无人机能够顺利完成任务的关键条件[1]。因此,需要对其路径规划进行优化。
使用路径规划算法计算无人机最优飞行轨迹,目前最常用的两种方法主要为蚁群算法和启发式搜索算法[2]。其中,启发式搜索算法是一种最小代价函数,它基于最小代价,在从初始点到当前点再到目标点的搜索过程中,连续地对目标节点进行扩展,从而形成一组最小代价路由,使一组节点到达最优路径。启发式搜索通常用来解决静态的不确定规划问题,广泛应用于地图中。该方法具有很强的收敛能力,常用于单点搜索,在快速搜索路径上有较好的效果,但随着搜索区域的增大,其记忆数据也随之增大,使搜索时间变长[3]。该算法难以实现无人机约束的融合,只能生成一条路径,无法满足某些特殊任务的需要,导致无人机路径不可行;蚁群算法是一种基于动物从洞穴中寻找食物这一最短路径现象的合作发现方法,该方法采用路径规划的方法,首先使给定路径的所有节点都处在信息素的作用范围内,然后蚁群算法通过这些节点达到目标路径,避免了路径中节点对信息素的影响,从而减少了路径中节点的数目,提高了路径的可重复性,直到找到了最佳路径为止[4]。然而,蚁群算法在无人机飞行路径规划过程中存在计算步骤复杂、计算量大的问题。
因此,针对上述两种路径规划算法中存在的问题,结合贝叶斯决策方法,设计无人机航迹自动规划方案。在无人机飞行路径自动规划硬件部分,分别设计了自动规划模块、动画演示模块、地图导航模块及数据导出模块,在硬件模块设计的基础上,利用贝叶斯决策算法设计无人机飞行路径自动规划流程,传统路径规划方法存在规划准确性较差的问题,为此基于贝叶斯决策算法设计无人机飞行路径自动规划流程。确定贝叶斯先验概率,在此基础上从预测距离和障碍物节点数量两个方面,准确选择节点预测区域,计算飞行安全距离,初步规划避障路线,计算后验概率,选择备份区选择节点。最后利用重复循环机制综合循环结果并选择最优路径。
1 基于贝叶斯决策的无人机飞行路径自动规划方法设计
传统路径规划方法存在规划准确性较差的问题,为此基于贝叶斯决策算法设计无人机飞行路径自动规划方法。首先设计无人机飞行路径自动规划硬件模块,实现无人机飞行路径自动规划的功能运行,并结合基于贝叶斯决策的无人机飞行路径自动规划流程,确定贝叶斯先验概率,据此从预测距离和障碍节点数量两方面出发,获得精准的备选节点预测区域,计算飞行安全距离初步规划避障路线,计算后验概率,选定选择飞行区域内备选节点。最后通过 repeat循环机制,综合循环结果,选取最优路径,实现无人机飞行路径的准确规划。
1.1 无人机飞行路径自动规划模块设计
无人机飞行路径自动规划模块主要有4个部分,分别是自动规划模块、动画演示模块、地图导航模块和数据导出模块,如图1所示。

图1 无人机飞行路径自动规划模块
由图1可知,在自动规划模块中设置操作按钮,负责控制无人机飞行;动画演示模块负责展示飞机飞行路线;地图导航模块负责为无人机飞行路径规划提供精准定位数据;数据导出模块负责导出并保存相关数据。
1.1.1 自动规划模块
按照无人机航路的要求,自动规划模块主要是由自动规划的路径选项分类器、自动规划的操作模块、坐标显示模块组成的,其中路径选项分类器在选择航路时,分别按4个按钮进行设置,分别控制起点、终点、落脚点、禁飞区;自动规划的操作模块包含了3个按钮,分别是规划按钮、优化按钮、演示按钮;坐标显示模块主要显示了场景坐标、起点坐标和终点坐标[5]。在开始和结束时,单击显示区域的开始和结束按钮,威胁点和禁止按钮来确定威胁区域和禁飞区,然后,通过操作旧按钮来制定路径规划的自动规划选项模块,生成黑色的路线图,并通过新按钮生成新的航行路线图。自动规划模块结构示意图如图2所示。

图2 自动规划模块结构示意图
1.1.2 动画演示模块
动画演示模块主要负责显示初始航迹和优化航迹的两个航迹,通过按动视图按钮,即动画演示按钮,将看到一架小型模拟飞机按计划飞行。模拟小飞机不仅能在初始飞行路径飞行,而且能在优化后的最佳飞行路径飞行。这种生动、直观的动画演示模式,使优化航迹更加清晰准确[6]。
动画演示模块主要包括索引模块、非线性变形器、声音编辑器,其中索引模块支持跨平台操作,具有多线程设计,支持大量用户访问;非线性变形器的控制柄显示在动画场景中,节点将列在通道盒内,这些节点包括控制柄节点和弯曲变形器节点[7]。使用显示操纵器工具,为动画演示提供交互编辑功能;声音编辑器包括声卡、调音台和混音器,使用240PRO型号的LEWITT声卡,如图3所示。
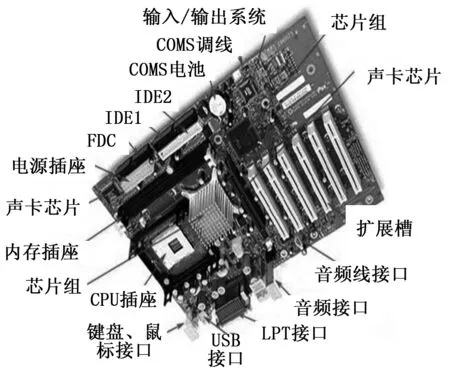
图3 LEWITT声卡结构
如图3所示,声卡结构包括输入/输出系统、电池、插座、芯片、接口等。声卡结构中的芯片组负责从各个模块中提取声音信号,通过AD转换器,将声音信号转换为数字形式。采用复用数字信号处理器处理语音指令,不仅减轻了 CPU的工作负荷,同时也提高了执行速度。
1.1.3 地图导航模块
地图导航模块是基于单片机体系结构特性设计的,采用超低功耗、体积小巧的 GNSS芯片,具有超高的灵活性[8]。接收端采用 UBX或 NMEA协议,通过串口将射频信号发送到天线的输入端,并提供位置、速度、时间等信息。
LS-TM8N地图导航模块如图4所示。
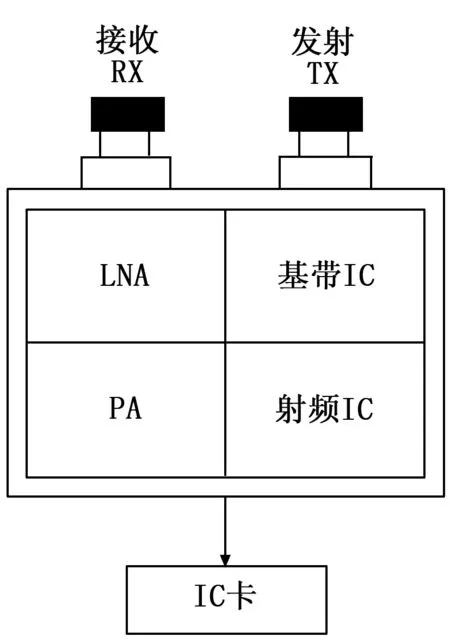
图4 LS-TM8N地图导航模块
由图4可知,显示在主地图上的地图范围在导航窗口位置发生变化时也发生变化,为实现这一目标,最重要的一步是在导航窗口中将数据与中间主地图显示区域中的数据对齐。
1.1.4 数据导出模块
在航路规划设计中,航路规划路线、航路起始点、地图威胁点等信息会在主图中显示,数据导出模块以bmp格式图片文件的形式对这些信息导出并保存[9]。当航路规划完成后,想要对需要保存的路线图生成纸张,可单击位于自动路径规划界面的右上方的SaveButton,通过点击此按钮,就会将数据信息进行保存。
1.2 贝叶斯决策原理
贝叶斯法解决了传统遗传算法在交叉、变异等方面存在的问题,通过贝叶斯网分析种群质量,利用贝叶斯网中的参数反映染色体与基因的关系程度,利用贝叶斯网的演化规律,利用贝叶斯优化算法更新无人机飞行规划路线[10]。贝叶斯决策原理为:
利用多种选择机制,从当前规划路线中选取最佳规划路线。基于数据信息,使用后验概率的贝叶斯元胞蚁群算法计算最佳规划路线;利用计算结果,联合赋值产生新的个体集合。经过以上步骤反复执行直至达到获取最佳规划路线为止,该方法的终止条件可为运行到某个代次、群体中存在足够多的解[11-13]。
1.3 路径规划方法
进行路径规划时,根据贝叶斯决策原理,结合贝叶斯元胞蚁群算法,对无人机飞行路径进行规划,详细步骤如下。
1)确定贝叶斯先验概率:
在贝叶斯元胞可以飞行区域N1(Sn)内,依据导出的数据,确定备选节点概率,该概率即为最优路径选择中的先验概率,公式为:
(1)
式(1)中,Th表示贝叶斯元胞可以飞行区域N1(Sn)内的信息素。
2)确定贝叶斯元胞备选节点条件概率:
设预测半径为RR,构造预测区域RD,对于元胞邻居可行区域N1(Sn)内的任意一个备选节点Wi:
RD(Wi)={dot|dist(Wi,dot)
dot∈L}
(2)
式(2)中,Angle(n)表示不同备选节点间的夹角,该夹角最大值为80°。备选节点的预测区域,如图5所示。
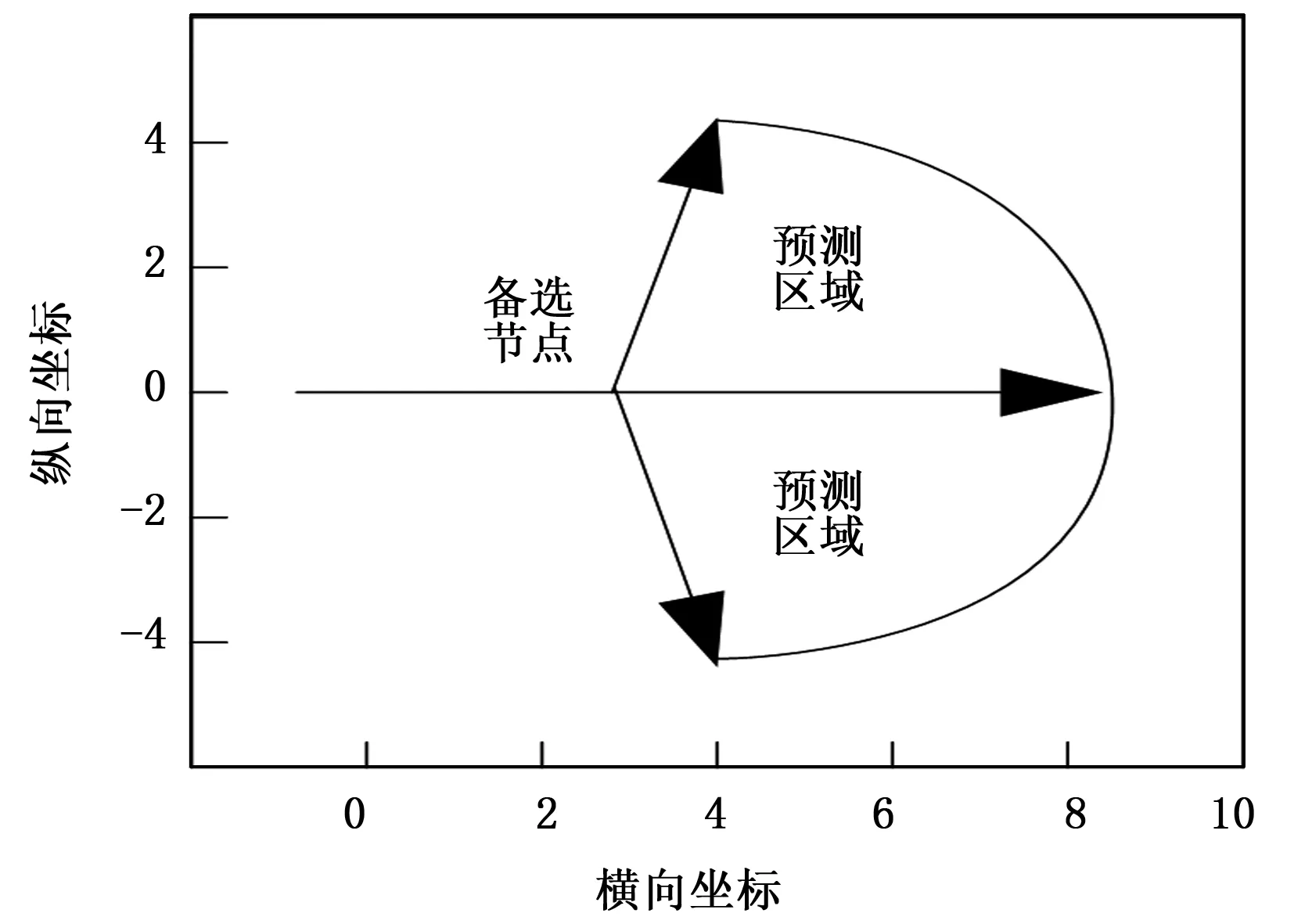
图5 备选节点的预测区域
由图5可知,对于备选节点预测区域的确定需从两个方面考虑,分别是预测距离和障碍节点数量。其中预测距离指的是无人机到达目标位置的距离和无人机与障碍物位置的距离;障碍节点指的是无人机可以飞行区域内出现的障碍目标。结合上述两个方面内容,可以获取精准备选节点预测区域[14-16]。
3)避障规划:
为了防止避障失败,无人机需要一定的飞行安全距离,这里设定为D0,针对无人机和障碍节点的距离,定义条件概率:
f(Wi)=

(3)
式(3)中,mindist(Wi,obstacle)表示备选节点和障碍物之间的距离,该距离值越小,说明条件概率值越小。通过对上述全部数据进行归一化处理后,能够得到贝叶斯元胞可以飞行区域内的条件概率[17],计算公式为:
(4)
式(4)中,G表示规划事件;P(Wi|G)表示后验概率。根据规划路径找到最优解后,可以在所选择的预测区域内寻找备选节点,由此得到全局最优解,该解中包含了所有节点概率评估结果[18]。
4)确定贝叶斯元胞备选节点后验概率:
贝叶斯元胞备选节点后验概率,计算公式为:
(5)
式(5)中的Wi指的是依照事先规划好的路线,通过后验概率选择无人机在可以飞行区域内的备选节点。
5)更新无人机飞行信息:
详细步骤如下。
1)该方法首先对地图区域进行矩形设置,将其网格离散化,然后利用灰度矩阵H和信息素矩阵IM建立相应的网格;
2)设定无人机飞行规划模拟批次数量为m,同批次数量为m0。
3)批次循环开始for(i=1:m);
4)同批次内无人机的循环开始for(j=1:m0);
5)使用 repeat循环机制,确定当前无人机可以飞行的区域,由此确定备选节点的先验概率、条件概率和后验概率。为了完成蚂蚁移动,在无人机到达目标节点之前,对其进行抽样,完成重复循环。
6)同批次无人机的循环结束,确定m0条路径并按照距离最短选择局部最优路径;
7)在圈形轨迹识别完成之后,剔除局部最优路径;
8)在下一批无人机模拟航行中使用优化后的局部最优路径更新信息;
9)飞行批次m循环结束,综合m次飞行模拟结果选取最优路径。
综上所述,能够得出无人机飞行路径自动规划流程,如图6所示。
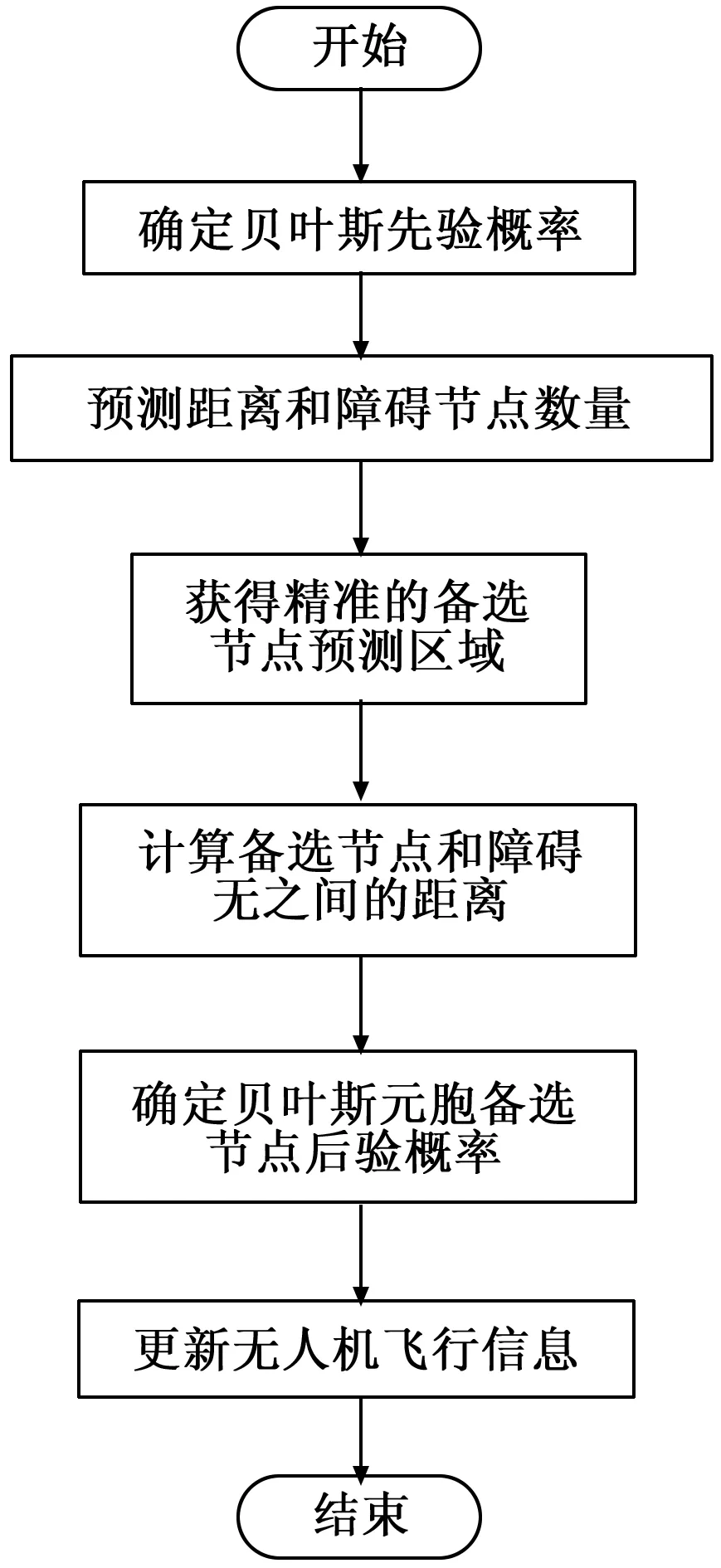
图6 无人机飞行路径自动规划流程
2 实验结果与分析
为了验证基于贝叶斯决策的无人机飞行路径自动规划方法研究合理性,在集成开发环境下进行试验验证分析。
2.1 数据分析
在集成开发环境下,划分区域单元格,并将其划分为可飞行和不可飞行两种,其数据展示结果如图7所示。

图7 数据展示界面
由图7可知,黑色单元格表示不可飞行,蓝色单元格表示可飞行。
2.2 实验结果与分析
在实验数据支持下,分别使用启发式搜索算法、蚁群算法和基于贝叶斯决策自动规划方法对比分析无人机飞行遇到静态或动态障碍物的避障能力。
2.2.1 静态障碍物
3种方法遇到静态障碍物的避障能力,对比结果如8所示。
由图8可知,使用启发式搜索算法遇到了两个障碍物,使用蚁群算法遇到了一个障碍物,使用基于贝叶斯决策自动规划方法没有遇到障碍物。上述实验结果表明,基于贝叶斯决策自动规划方法能精准规避静态障碍物,无人机飞行路径规划的准确性较好,避障性能优。
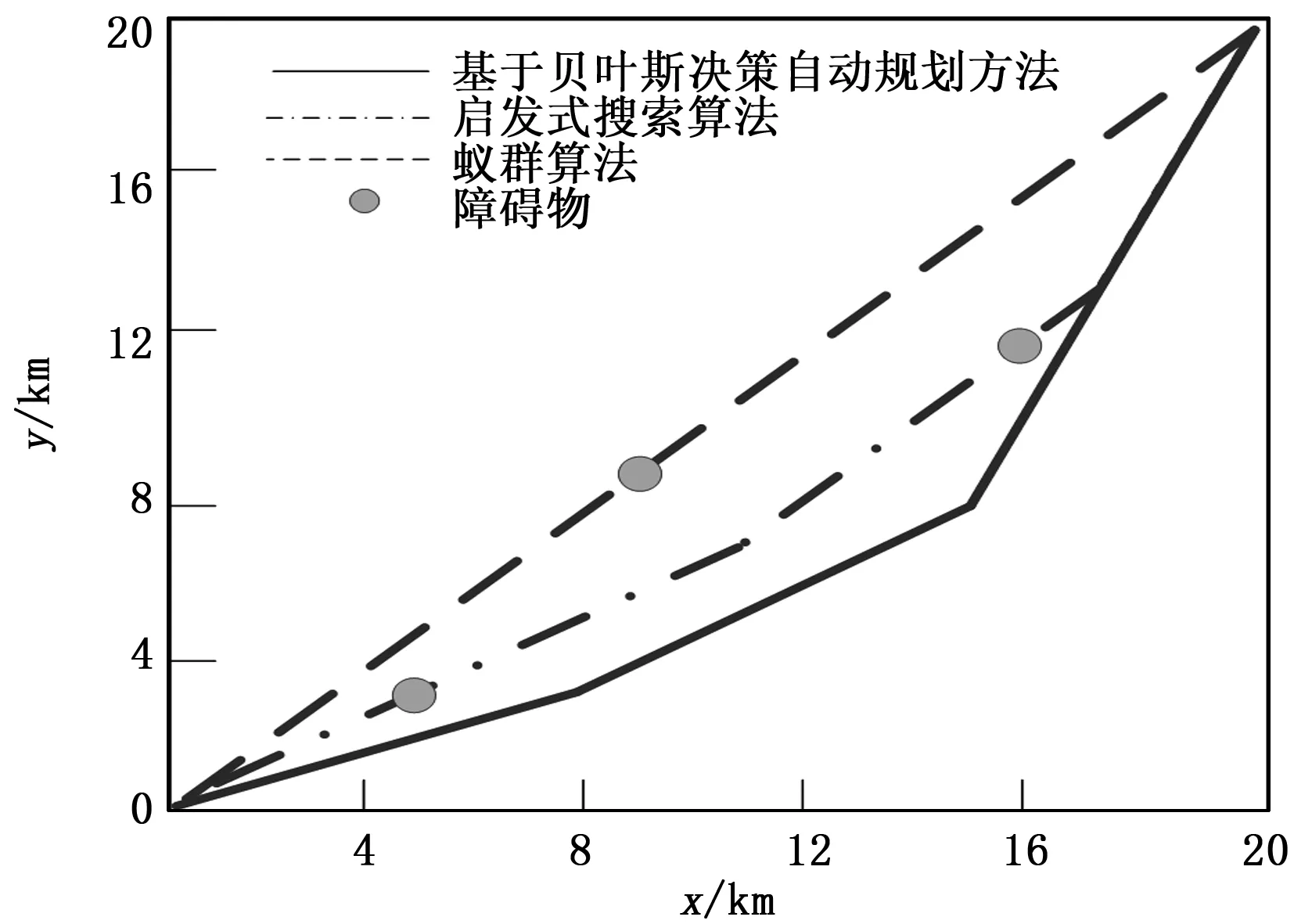
图8 3种方法静态障碍物避障能力对比分析
2.2.2 动态障碍物
3种方法遇到动态障碍物的避障能力,对比结果如9所示。
由图9可知,使用启发式搜索算法没有障碍物,但飞行路线较远,使用蚁群算法遇到了两个障碍物,使用基于贝叶斯决策自动规划方法没有遇到障碍物。实验结果表明,基于贝叶斯决策自动规划方法能精准规避动态障碍物,无人机飞行路径规划的准确性较好,避障性能优。由于贝叶斯决策算法能够通过先验概率和后验概率规划无人机飞行路径,结合贝叶斯元胞蚁群算法获取最优路径,因此该方法的避障能力较好。

图9 3种方法动态障碍物避障能力对比分析
通过上述分析结果可知,基于贝叶斯决策自动规划方法,无人机飞行路径自动规划效果较好,无论是遇到静态障碍物,还是动态障碍物,都能良好避障。
3 结束语
在贝叶斯决策下实现了无人机飞行路径的自动规划,优化后的航迹使无人机飞行更加精准可靠,确保任务的顺利完成。实验结果表明,该方法对静态障碍物及动态障碍物的避障能力均较好,能够准确捕获避障信号,实现障碍物自动规划。因为实际的路径规划通常包含多个目标节点,所以多目标路径规划更有实际意义。采用贝叶斯决策方法对多目标路径规划进行了优化研究,同时对同一批执行不同任务的目标节点进行了路径规划,使路径规划更具有合理性。
