变压器内检仿生机器鱼机构优化设计
2021-11-29邓清东杜必强姚万业
邓清东,杜必强,姚万业
(1.华北电力大学 控制与计算机工程学院,河北 保定 071003;2.华北电力大学 能源动力与机械工程学院,河北 保定 071003)
0 引言
变压器在电力系统中扮演着关键角色,承担着电压变换、电能分配和传输的功能,其运行状态直接影响电力系统的稳定性和可靠性[1]。因此,变压器故障也是整个电力系统稳定性的重要隐患。目前,变压器内部故障检测方法主要有人工探测和油色谱分析技术[2]等间接方法。人工探测需要将变压器内部绝缘油排空,再由检修人员进入油箱内部进行检查,不仅耗费大量人力、效率低,还可能使变压器油受到二次污染,而间接检测方法也依然存在着故障点定位困难等问题[3]。
为了规避这些问题,随着传感器技术、机器人技术的发展,越来越多检测机器人被用来代替人工,实现对油浸式变压器的故障检测。2018年,沈阳自动化所设计了一种喷射推进方式的球形变压器内检机器人[4],但由于球形不稳定,容易失去平衡,需要更大功耗的动力推进才能保证其稳定游走,造成推进功耗大,降低了机器人的工作时间[5]。针对上述问题,本文提出了一种用于油浸式变压器内部故障检测的仿生机器鱼,通过鲹科鱼类游动推进机理实现运动控制。资料显示自然界鱼类具有很高的推进效率,其中鲹科鱼类的推进效率甚至可达90%,并且在高速和低速下都具有非凡的机动能力,远远领先于传统的人造水下航行器[6]。本文在一种基于鲹科鱼类鱼体波模型的多连杆机构推进模型的基础上,通过对连杆机构杆长进行优化,从而使此推进模型的速度更快,工作效率更高。
1 鲹科鱼类运动学分析
一维稳态游动情况下,鲹科鱼类推进运动主要包括鱼体波动、尾鳍摆动/平动复合运动两种。其鱼体波是一个从鱼头至鱼尾的波幅渐增的正弦波,可以看做是由具有二次曲线特征的波幅包络线和正弦曲线合成[7]。Barrett[8]等提出了鱼类游动时鱼体波的方程表征,如式(1)所示。

式(1)中,ybaby为鱼体横向摆动的位移;x为鱼体在x轴上的坐标;k为鱼体波波数,k=2π/λ;λ为鱼体波波长;c1为线性波幅包络线系数;c2为二次波幅包络线系数;ω为鱼体波的频率,ω=2πf=2π/T。在一维稳态游动过程中,通常鱼体波波长λ≥LB(LB为鱼体长),即鱼体波波数k≤1。因此,在设计仿生机器鱼时,不需要复杂的机构来产生足够的柔韧性以模拟鱼体的多个身体波[7]。本文采用3个串联的连杆机构模拟柔性鱼体,通过连杆机构拟合鱼体波曲线计算得到每时刻各关节点的相对位置,进而实现机器鱼的形状仿生以及运动仿生。
通过对式(1)进行离散化处理,将一个运动周期等量分为M份,如式(2)所示。鱼体波方程被分为了与时间无关的样条曲线序列ybaby(x,i)以及与时间相关的摆动频率f,其中f由ybaby(x,i)至ybaby(x,i+1)之间的时间间隔决定。给定鱼体波系数即可绘制样条曲线序列如图1所示。
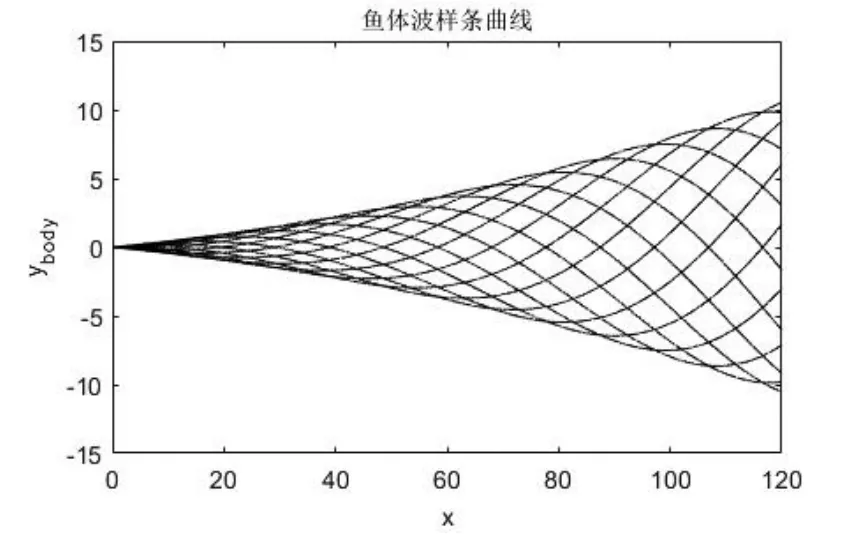
图1 鱼体波被离散后的样条曲线序列Fig.1 A sequence of spline curves in which fish body waves are discretized

式(2)中,i为一个运动周期中第i条样条曲线,M为体波分辨率,表示一个运动周期鱼体波被离散的程度。
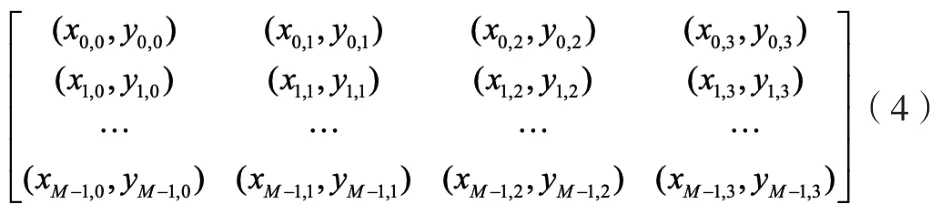
考虑到通过连杆机构拟合鱼体波曲线计算得到每时刻各关节点的相对位置,进而实现运动控制。设每个连杆的长度为l1,l2,l3,每个连杆的端点坐标为 (x0,y0),(x1,y1),(x2,y2),(x3,y3),则有 :
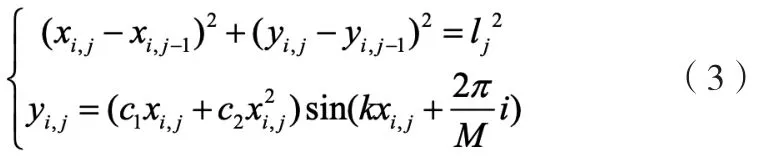
式(3)中,(xi,j,yi,j)为第i时刻第j根连杆的后端点坐标,其中,(xi,0,yi,0)为(0,0),根据上述方程组即可求得M×4组(xi,j,yi,j)坐标:
根据所求得的第j根连杆端点在第i时刻的坐标,可以通过式(5)求出该杆与鱼体主轴的夹角θij。

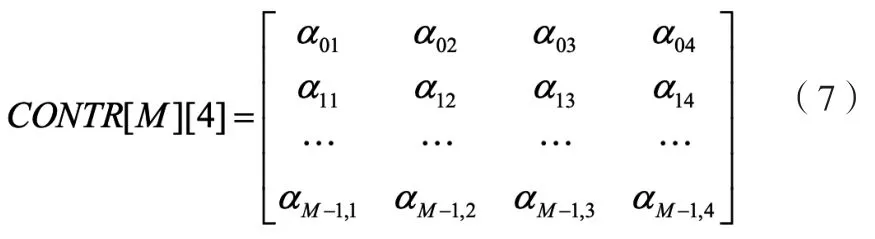
由式(5)所得夹角,通过式(6)求出第j根连杆在第i时刻和第i-1时刻的夹角αij,进而可以得到一个M×4的二维关节摆动控制数组CONTR[M][4]。

通过控制夹角αij即可实现机器鱼的游动仿生,在此基础上,通过叠加不同的关节偏移量以及调节摆动频率f,即可实现机器鱼的转向运动以及游动速度调节。
2 仿生机器鱼机构优化设计
考虑到仿生鱼的机动性、游动效率以及机电系统的可实现性,本文选用了3根连杆模拟鱼体,但是由于连杆数量、长度以及自身的刚性问题,实际拟合曲线与理想鱼体波之间存在相对偏差,当偏差较大时,机器鱼很难体现理想鱼体波曲线在水动力学上的优越性。
为了减小机器鱼鱼体实际拟合曲线与理想鱼体波之间的偏差,本文以鱼体实际拟合曲线与理想鱼体波之间的偏差为优化目标,以鱼体三关节尺寸l1,l2,l3为设计参数,以机器鱼机电系统在具体实现中的诸多限制为约束条件,采用遗传算法进行优化计算,从而得到最合适的鱼体关节尺寸。
2.1 目标函数
如图2所示,机器鱼鱼体连杆机构实际拟合曲线与理想鱼体波之间的偏差可以表示为连杆与鱼体波曲线之间围成的面积,即:
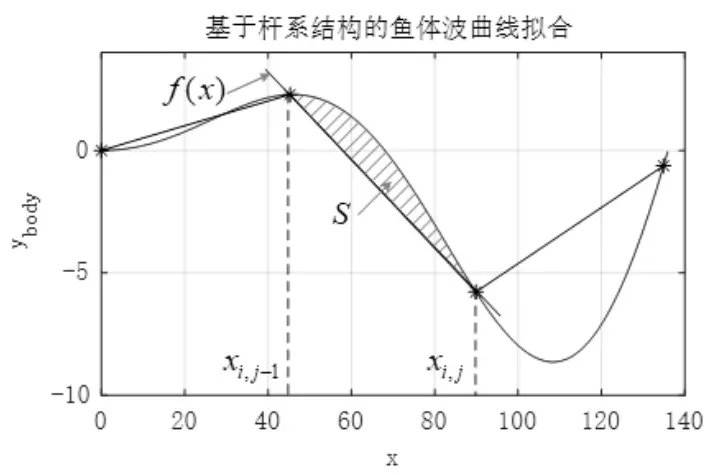
图2 机器鱼鱼体实际拟合曲线与理想鱼体波之间的偏差Fig.2 The deviation between the actual fitting curve of the robot fish body and the ideal fish body wave

其中,xi,j-1以及xi,j表示与鱼体波曲线相交的第j根连杆两个端点的x坐标可由式(3)求解,f(x)为连杆所在直线:

则有在一个运动周期内,鱼体实际拟合曲线与理想鱼体波之间的总偏差为:

2.2 约束条件
在仿生机器鱼机械结构中,关节尺寸相对短的部分柔软度比较高,可以产生较大角度的摆动,而大多数鱼类鱼体摆动幅度从鱼头至鱼尾方向逐渐增大,又因为在机器鱼的物理实现中,各连杆长度必须大于等于其驱动电机所要求最小尺寸lmin,因此在机器鱼关节尺寸优化问题中,有如下不等式约束条件:

另外,在优化过程中,必须保证鱼体长度为一个常数Cbody,因此l1,l2,l3必须满足等式(12)约束:

2.3 遗传算法
遗传算法是一种通过模拟自然进化过程搜索最优解的方法[9],主要通过初始化种群、编码、解码、选择、交叉以及变异等过程进行优化搜索[10]。遗传算法具有鲁棒性较好,
可以求得全局优化中的最优解等优点,适用于求解非线性约束下的最优化问题,因此本文采用遗传算法进行优化。
2.4 计算实例与优化结果
本文以选用ES08MA舵机为驱动电机的仿生机器鱼作为研究对象,机械结构包括鱼头、鱼体以及尾鳍,其中鱼体长度为136 mm,舵机要求最小关节尺寸为30 mm。根据对自然界鲹科鱼类的研究,尾鳍摆动轴摆动幅值即鱼体最大摆动幅值一般为体长的0.075~0.1倍[7],因此通过MATLAB仿真后,设定c1为0.04,c2为0.0004,鱼体波波数k为0.046。
基于上述建立的优化模型,通过MATLAB遗传算法工具箱进行优化计算,设置遗传算法的控制参数如下:种群规模为50,交叉概率为0.8。其适应度函数变化图像如图3所示,在第51代时群体适应度均值水平达到最低,即l1,l2,l3均为45.33 mm时,实际拟合曲线与理想鱼体波面积达到最小。
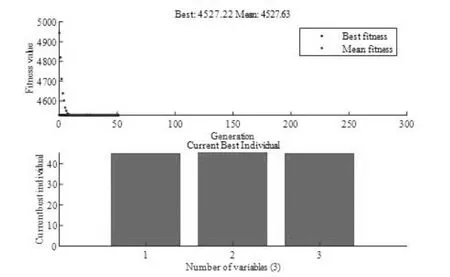
图3 遗传算法适应度变化及最佳个体Fig.3 Genetic algorithm fitness change and the best individual
3 实验与仿真
为了验证优化设计的有效性,本文通过ADAMS仿真软件对鱼体关节尺寸不同的两个机器鱼虚拟样机模型进行对比实验,机器鱼机构模型如图4所示。优化组的鱼体关节尺寸根据优化结果所设,均为45.33 mm,为了与优化组形成对比,对比组的鱼体关节尺寸按照1.2:1:0.8的比例分别设置为54.4 mm,45.33 mm,36.27 mm。
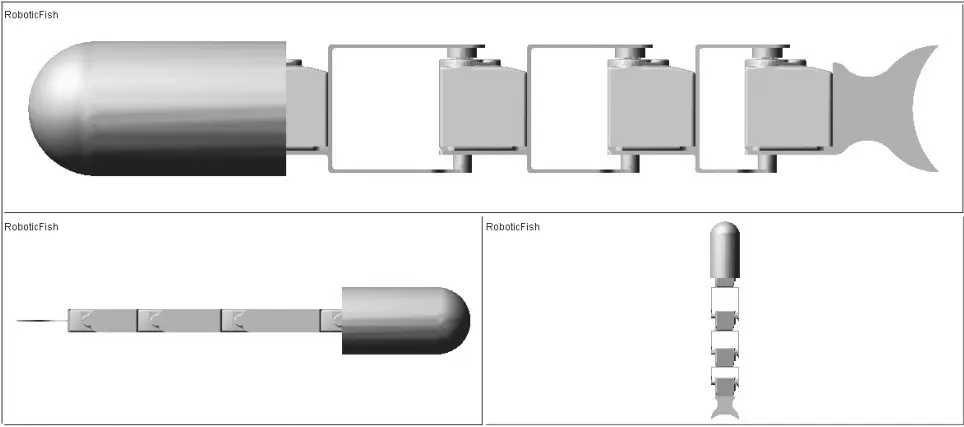
图4 机器鱼机构模型Fig.4 Robot fish mechanism model
将UG建好的机器鱼模型导入ADAMS VIEW中,并设置模型的相关材料属性,添加约束、驱动力矩,以及设置仿真时间、步距进行仿真。通过对鱼头部位的速度进行测量,得到两组虚拟样机游动的速度变化曲线如图5所示。
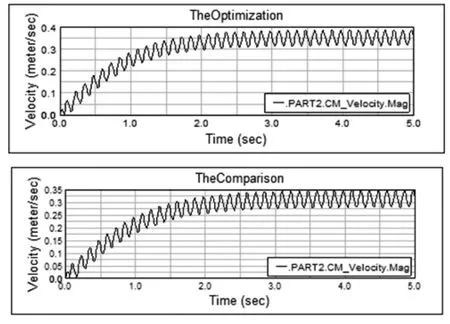
图5 两组虚拟样机游动速度变化曲线Fig.5 Two groups of virtual prototypes swimming speed change curve
从图5中可以看出,在相同的游动参数设置下,两个模型的游动速度具有相同的上升速率,均在3 s左右达到速度峰值,同时又因为水动力与阻力在鱼体、尾鳍摆动过程中的不平衡,游动速度呈上下波动状。通过将游动速度数据从ADAMS中导出,计算得到从第3 s~第5 s优化组和对比组虚拟样机游动速度的平均值分别为0.351m/s与0.313m/s。在一样的参数设置下,优化组的游动速度均值明显要高于对比组的速度均值,经过关节尺寸参数优化后的机器鱼模型更符合鲹科鱼类的游动特性。
4 结论
本文首先对鲹科鱼类运动学模型进行了分析,结合机器鱼物理实现的可行性分析,采用鱼体波拟合的方法对变压器内检仿生机器鱼机构参数进行优化,得到鱼体最佳关节尺寸参数,并通过ADAMS仿真软件对两个关节尺寸不同的机器鱼虚拟样机进行对比实验,验证了基于鱼体波拟合法的变压器内检仿生机器鱼机构优化设计的有效性。在相同的给定条件下,使得机器鱼的速度更快,提高了机器鱼的游动效率。