贴近摄影与倾斜摄影测量技术融合在水电站高坝精细建模中的应用
2021-11-29尚海兴吕文康王吉鸿
张 钊,吴 锋,尚海兴,吕文康,王吉鸿
(1.中国电建集团西北勘测设计研究院有限公司,西安 710065;2.新疆丝路坤元能源有限责任公司,新疆 哈密 839000)
0 前 言
贴近摄影测量技术是由张祖勋院士团队于2019年提出[1],其具有更高的空间分辨率和“多角度”观测的优势[2-3],但需要飞行器拥有可进行姿态控制的云台和高精度定位系统两项条件作为技术支撑。在水电站高坝建模应用领域中,此技术可以提供常规倾斜摄影无法拍摄区域的影像,在增加被关注区域纹理质量的同时,可灵活实施多角度的补摄漏洞,甚至使兴趣面达到毫米级分辨率,优化其模型量测精度。
常规倾斜摄影测量技术在三维建模工作中表现良好[4],但应用于已建成的水电站高坝中,坝后区域遮挡严重、弱光照、分辨率不统一等问题无法有效解决。在该类建筑物精细建模时,无人机如果过于接近被摄面,就会因影像重叠度不足,导致空中三角测量计算失败或模型成果存在漏洞;若直接进行变高航摄,又会面临电站上空输电线路带来的飞行风险。为解决该类问题,本文以青海某水电站三维实景建模工作为例,将“贴近摄影测量技术”和“倾斜摄影测量技术”融合后进行三维实景建模试验,阐述2种技术融合后在水电站高坝模型精化时,如何优化飞行线路、补充遮挡区域影像、统一模型精度,为解决常规倾斜摄影建模中常见的模型分辨率不统一、模型出现漏洞等问题提供方法。
1 技术方案及应用案例
1.1 试验概况
本次试验区为坝后式水电站,大坝坝体与坝后地面近乎垂直。试验区面积约为1 km2,包含电站上游部分库区,下游厂房和一定长度的河道。试验区坝前水域范围大,整体像控点布设少,坝高约160 m,坝长约410 m,两侧山体陡峭,坝后“凹陷区”内全天光照不足、阴影重,坝体与坝后厂房间距平均约为40 m,空中有数条不同高度的输电线路跨过。因工程需要,需航摄生产3 cm分辨率的三维实景模型。电站位置关系示意如图1。
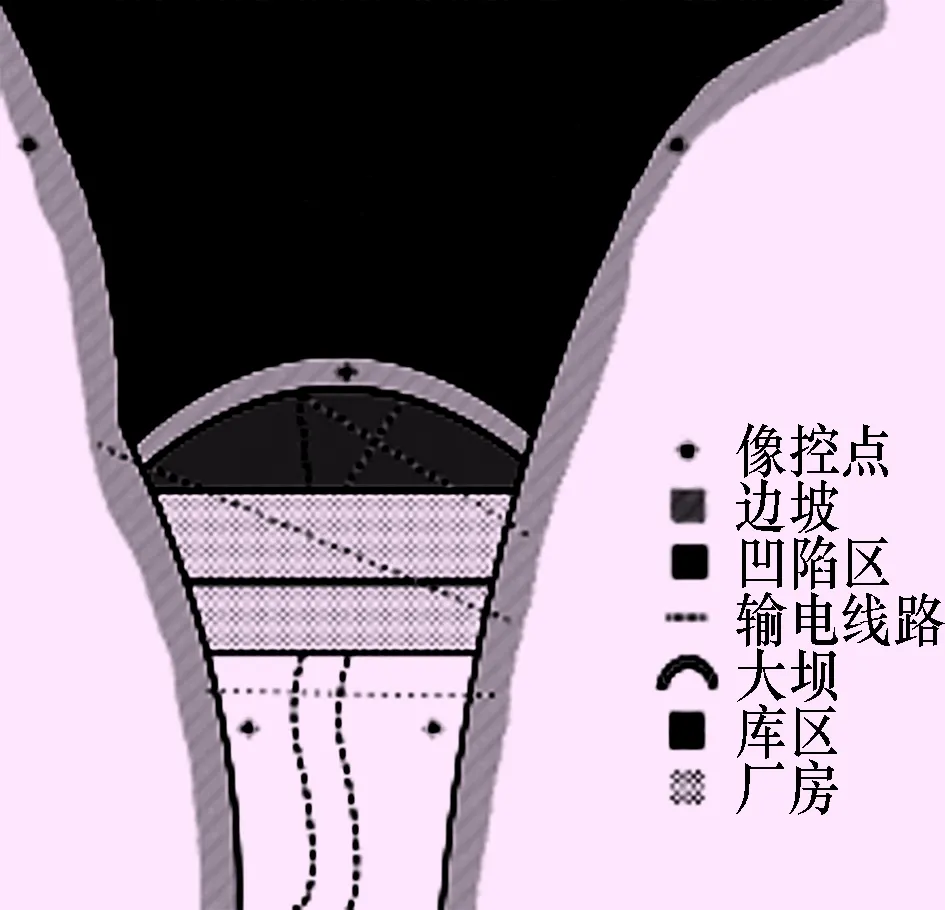
图1 水电站位置关系示意图
使用KWT-X6L-15六轴多旋翼无人机搭载RB-DG4Pros长焦五镜头航摄仪(以下简称KWT-RB航摄系统)分两层航高对试验区进行倾斜摄影。首次摄影相对坝后地面航高为340 m;第二次相对坝后地面航高为180 m。“凹陷区”、大坝起重机、厂房等兴趣区使用大疆Phantom 4 RTK航摄系统(以下简称Phantom 4R航摄系统)配合贴近摄影测量技术进行分区补摄,无人机贴近被摄影面距离为20 m左右。两套航摄系统影像重叠度参数均设为航向80%,旁向80%。航摄系统的参数见表1。
1.2 技术流程及思路
无人机高精度定位技术为贴近摄影测量最主要的支撑技术之一,一般POS辅助空中三角测量平差中线元素效果更强于角元素[5],加之贴近补摄时云台角度的记录准确性不高,故本次空中三角测量计算时,仅使用2种技术中POS的位置信息,而角度信息不参与计算。要将2种不同分辨率、不同设备获取的影像进行融合,需尽量保证两者的拍摄时间、光照强度、气象条件接近,防止阴影过大和库区雾气变化过大等不利因素造成影响。

表1 航摄系统参数表
本次首先使用KWT-RB航摄系统对电站整体进行倾斜摄影,降低航高后对坝后低高程区域再次进行倾斜摄影,将两次影像进行空中三角测量,完成初次建模;然后使用拥有三轴云台的Phantom 4R航摄系统对弱纹理立面和存在漏洞的兴趣区域、构件进行贴近摄影,最终将2种航摄系统生产出的影像融合后进行统一联合空中三角测量,完成二次建模。本次试验总体技术流程如图2。

图2 总体技术流程图
1.2.1摄影前准备
有关文献[6-7]中提到的方法在对航摄仪检校且满足精准相机参数、高分辨率高质量的原始影像等条件后可以减少部分像控点。本次试验区内,因近一半为水域,导致无全区域标准像控布设条件,故在试验区四周与坝顶中间均测设平高像控点,如图1所示;同时在大坝上下游不同高度使用RTK技术均匀测设若干检查点,用于后期对模型精度的检查。因贴近摄影时无人机距被摄面近,故摄影前需踏勘了解拟作业区域飞行安全隐患,确定操控人员观察点及无人机起降点,确保操控人员可以通过目视与图传系统结合后进行安全飞行。此外,由于飞行失误可能会造成严重后果,航摄前应向有关管理部门对作业空间进行申请。
1.2.2倾斜摄影
影像间的重叠度越大,相邻影像间的差异就越小,同名特征的搜索和匹配也就越容易[8],本次将航向和旁向重叠度均设为80%。由于大坝高差大,为保证大坝不同高度分辨率接近,倾斜摄影时按照2种航高进行飞行:先通过公开的低精度DEM数据对试验区内按高程划分区域,进行全区高航高航线飞行后,再规划低航高航线。2次航摄完成后整理影像并进行空中三角测量,建立初次模型。该模型与现场踏勘记录结合,更精准、多视角的了解被摄区域情况,为贴近摄影规避更多的飞行风险。
1.2.3贴近摄影
贴近摄影测量的本质是对“面”摄影,若仅使用垂直的摄影影像,高程精度无法保证,所以需要加入倾斜影像,两者优势互补能得到更准确、更优质的模型[9]。在初次模型上选出需提高分辨率、增强纹理、补摄漏洞等所有兴趣体和兴趣面,对这些区域进行贴近摄影,针对不同的区域规划概略航线,调节云台摄影角度,使相机镜头与每处被摄面尽量垂直后摄影。因贴近摄影测量的自动航线规划系统尚未成熟,航摄时,利用Phantom 4R航摄系统,采用手控飞行模式,在初次模型的基础上,完成贴近摄影测量航摄参数计算后进行手控航摄。配合实时图传系统,通过目视,可以实现较安全飞行,最终将每一兴趣区域单独进行空中三角测量。
(1) 兴趣面摄影
对“凹陷区”等需要补摄的兴趣面,通过初次模型量取、计算,确定贴近摄影测量航摄参数,后通过公式(1)计算出无人机贴近飞行的曝光点距离、相对于被摄面的方向[10]。
(1)
式中:Δs为水平方向两曝光点的距离,m;Δh为垂直方向两曝光点的距离,m;ox、oy为水平、垂直方向上期望重叠率;d为无人机贴近目标的距离,m;fovx、fovy分别为相机在水平、垂直方向的视场角,°。贴近摄影测量航摄示意如图3。
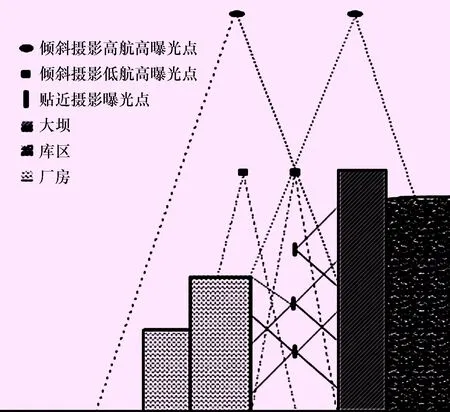
图3 贴近摄影测量航摄示意图
(2) 兴趣体摄影
为了增大贴近摄影测量的交会角,保证精细三维建模精度,需对被摄面进行相对“倾斜”的多角度摄影,将被摄面中容易遮挡忽略的细节覆盖[9]。对大坝起重机、大坝坝体等兴趣体进行贴近摄影补充,一般使用无人机对被摄兴趣体进行分层环绕飞行,并保证影像重叠度。兴趣体环绕摄影示意如图4。
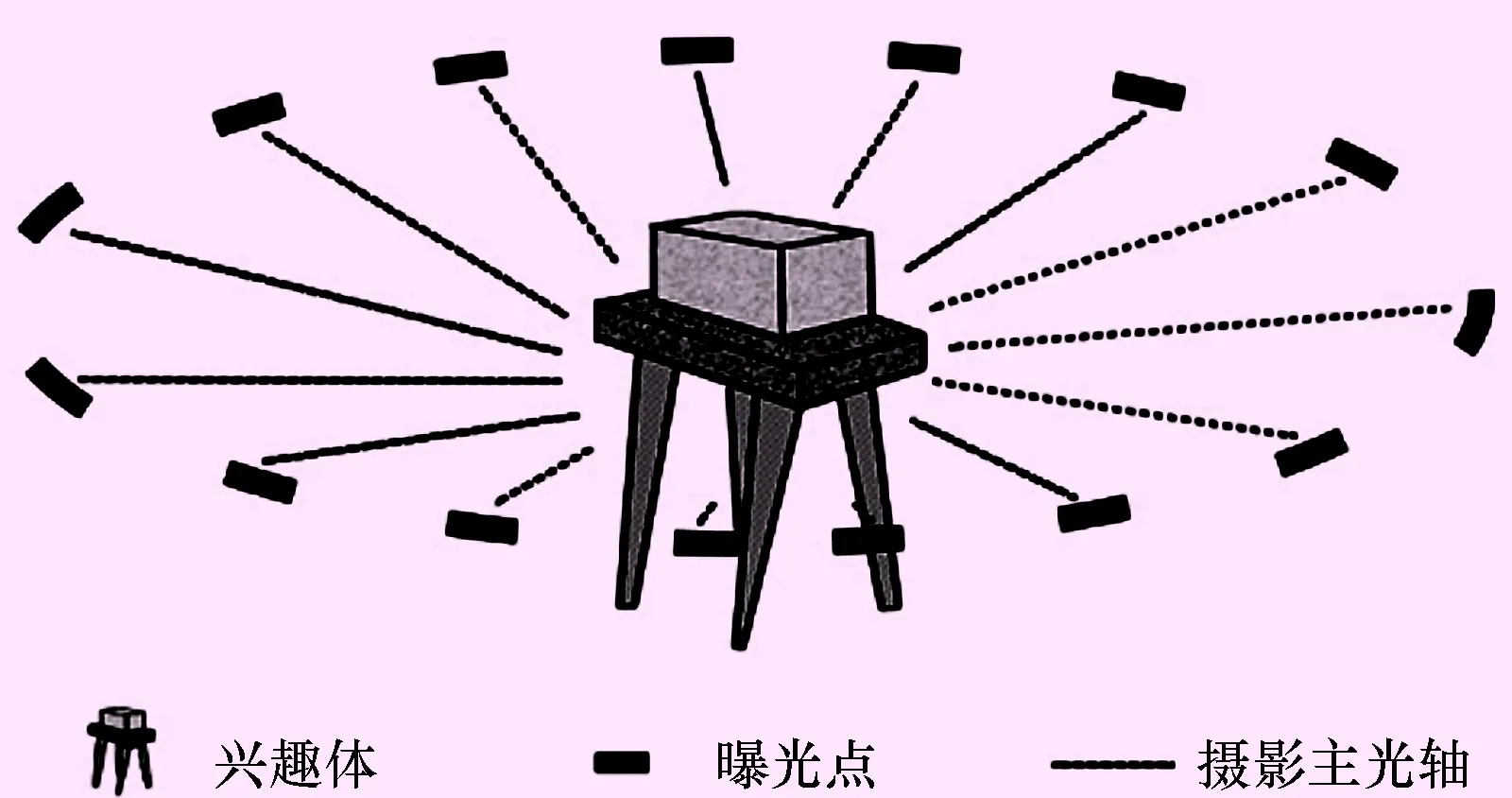
图4 兴趣体环绕摄影示意图
1.2.4生产及检查
不同航摄仪获取的多源遥感影像之间匹配难度往往较大[11]。直接将2种航摄仪拍摄的不同分辨率、不同摄影角度的影像同时进行空中三角测量,大概率会出现空中三角测量失败或模型“错层”。故需将每个兴趣区域单独空三成果与初次倾斜摄影空三成果进行联合空中三角测量,将两种航摄影像匹配到可靠的同名点,失败时需要手动添加部分连接控制点再继续计算。多处多源的影像融合流程为建立多种影像的像点坐标系,使其产生映射的数学关系,然后根据此关系进行坐标转换,最后融合[12-13]。贴近摄影影像与倾斜摄影影像之间的对应关系记为:
(2)
数学关系f表示为二元n次多项式:
(3)
式中:u,v分别为倾斜摄影影像坐标;x,y分别为贴近摄影影像坐标,称为u,v的共轭点;aij,bij为待定的多项式系数,n=1,2,3…。
联合空中三角测量完成后,进行二次建模。在本次使用的建模软件中,软件会自动检测并使用同一位置分辨率相对较高的影像,修补初次模型漏洞,提升兴趣区分辨率。由于水域影像匹配困难,坝前库区模型中大面积出现漏洞,下游河流异常凸起或凹陷,需使用模型编辑软件对异常部分进行编修。建模完成后通过前期测量的检查点对模型进行精度检查。
2 分 析
2.1 模型成果观感、纹理情况
将二次建模成果和初次建模成果进行比较,发现仅使用倾斜影像建立的初次模型在遮挡区域存在一定漏洞,且坝体立面纹理弱,低处比高处更加明显;而贴近摄影测量融合倾斜摄影测量方法生产的模型成果漏洞更少,坝体上下纹理显示均匀,“凹陷区”模型质量良好,空中输电线路明显,立面上楼梯纹理清晰,色彩对比度高。初次建模成果与二次建模成果特征、纹理对比如图5、6。
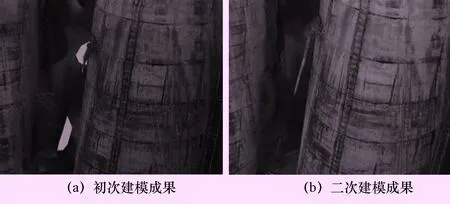
图5 立面纹理及漏洞对比图
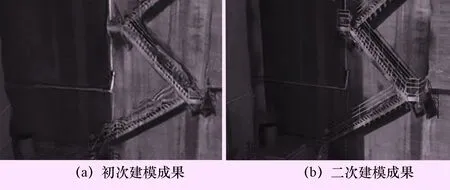
图6 立面细节纹理对比图
2.2 模型成果精度质量
使用检查点对本次模型量测精度检查,发现兴趣区二次建模成果精度优于初次建模成果精度,且满足相应测图规范要求。在坝体不同高度处选取若干立面检查2次模型成果分辨率,发现初次模型中,立面位置与倾斜摄影曝光点相对高差越大,分辨率越低;而二次模型中相对高差大于60 m后分辨率不降低。在相对高差小于40 m时,2次模型成果分辨率相同;在最大相对高差180 m的坝下地面处,两次建模成果分辨率差距均最大。立面位置与倾斜摄影曝光点相对高差对应分辨率变化如图7所示。

图7 立面位置与倾斜摄影曝光点相对高差对应分辨率变化图
2.3 贴近摄影测量技术与倾斜摄影测量技术融合方法的分析
在兴趣区,使用“倾斜”和“贴近”2种技术融合的方法航摄生产的成果精度、分辨率明显优于仅使用倾斜摄影测量技术的成果。贴近摄影技术成果能对倾斜摄影模型进行精化,而初次建模成果对贴近摄影的航线规划又有很大意义,两者相辅相成。目前2种技术的融合需使用2种不同传感器在不同时间段进行。因此,2种传感器拍摄时阴影面积、通透性、曝光度等应尽量保持一致,否则将会给多源数据的融合带来困难,对最终生产的模型在观感和精度方面产生负面影响。手动航飞虽然自由度大但对飞行器的操控技术要求高,且不能严格执行预设参数,现阶段迫切需求用于贴近摄影智能航线规划、云台自动控制的软件系统。专业设备若能实现对云台角度自动控制且精准记录,或可进一步提升影像融合成功率和模型精度。
3 结 语
本次介绍的多次空中三角测量方法给多源、不同分辨率影像融合提供了一种思路。试验后发现,采用倾斜摄影测量与贴近摄影测量技术融合可在水电站高坝精细建模过程中发挥重要作用,较仅使用倾斜摄影测量技术优势明显,尤其是可以对坝体立面、陡峭边坡、弱光照、阴影等区域的纹理进行有效补充,提升分辨率,生产出整体质量满足要求的水电站模型。但受飞行器云台角度限制,无法实现上视摄影,故对构建筑物某些空间面无法进行拍摄,还需进一步研究解决此类问题,或可以通过地面补摄装置与特殊无人机补摄系统配合作业来实现[14]。
