基于模糊控制的纯电动汽车再生制动控制策略研究
2021-11-28杨凤敏汪伟王汝佳盛广庆罗金
杨凤敏 汪伟 王汝佳 盛广庆 罗金

摘 要:针对纯电动汽车制动能量回收效率较低的问题,提出一种以制动强度、电池荷电状态和车速为输入变量,以电机制动力比为输出变量的模糊控制策略。首先,对制动力进行分配;其次,设计模糊控制器;最后,在ADVISOR和Simulink中建立模型进行仿真。结果表明:改进后的控制策略使电池受到的最大冲击电流减小约17 A,电池荷电状态值比改进前增加了0.02,汽车续驶里程提高了6.51 km;汽车在制动时电机制动力所占总制动力的比例增大。所设计的制动策略有助于汽车制动能量的回收,有效延长了纯电动汽车续驶里程。
关键词:纯电动汽车;复合电源;再生制动控制策略;模糊控制
中图分类号:U469.72 文献标识码:A 文章编号:2095-7394(2021)04-0068-08
当前,世界各国都面临着环境问题。由于传统燃油汽车易造成大气污染;因此,在未来的发展中,电动汽车具有广阔的前景。电动汽车具有污染小、噪音低等优点,但是,受诸多因素影响,其续驶里程会有所减少。为解决该问题,可以从电池储能和能量回收这两方面进行研究。然而,目前在电池储能技术方面尚未取得突破性进展[1];因此,再生制动能作为电池的补充能量,对其进行有效回收已成为电动汽车高效利用能源的有效途径。
采用再生制动技术提高电动汽车的能量利用率和里程数,是当前电动汽车技术研究的重要方向之一[2-3]。赵国柱等人[4]提出了一种基于不同载荷率的再生制动控制策略,显著提高了车辆的制动能量回收率,但该方法目标较为单一,没有考虑影响车辆再生制动的综合因素。刘丽君等人[5]在对再生制动控制策略的研究中,设计了三种机电制动控制策略,明显提高了车辆制动能量回收率和续驶里程数,但研究中没有考虑到影响制动的因素,结果与实际有些偏差。王耀南等人[6]提出一种基于模糊控制的控制策略,但所设计的模糊控制器在制动强度较低时,会使驱动轮的制动力较小,从而使能量回收效率的提升空间减小。
本文以纯电动汽车为研究对象,在已有研究的基础上提出一种保证电动汽车动力性的再生制动控制策略,并在Simulink中建立相应的模型进行仿真,从而验证了所设计的制动策略能明显提高汽车的续驶里程数和制动效能。
1 再生制动控制策略
1.1 制动力分配方案
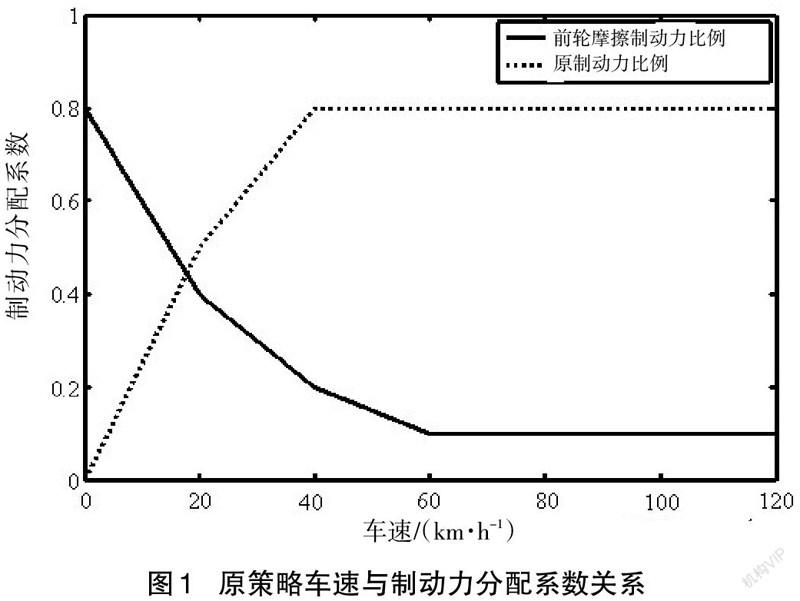
ADVISOR(高级车辆仿真器)中自带的再生制动力分配策略是利用当前的车速,然后通过查表法来分配汽车在制动时的制动力。车速与制动力的比例分配系数关系如图1所示。
由图1可以看出,原模型的控制策略仅仅考虑了车速对其制动的影响,而忽视了其他影响因素,导致该策略回收的能量非常有限,不能高效地回收汽车的制动能。在此,对其制动力分配作以下研究。
汽车在实际行驶过程中涉及制动时,其制动性能与前、后轮的抱死状况及先后有着密切关系。前、后轮制动抱死分为三种状况:前轮先抱死;后轮先抱死;前、后轮同时抱死。第一种状况会使汽车在制动时失去方向,第二种状况会使汽车在制动时失去其稳定性。以纯电动汽车为研究对象,计算所用参数如表1所示。
首先,前轮先抱死,此时前轮和后轮受地面附着力的关系表达式为:
其组成的曲线称为[f]线组,其中,路面附着系数[φ]为0.6。
其次,后轮先抱死,其表达式为:
最后,前、后轮同时抱死,此时车轮对地面附着力的利用率最大,对前轴和后轴的制动力需要按照I曲线来进行分配[7]。曲线方程前轮制动力与后轮制动力的关系表达式为:
车辆制动系统除了要尽可能提高制动能量的回收率之外,还应兼顾汽车的安全性。针对前轴和后轴的制动力分配问题,ECE制动法规给出了明确的规定[8]:当[φ]为[0.2 0.8]时,制动强度[Z][]0.1+0.85([φ]-0.2)。此时,ECE法规边线即M线方程为:
式中:[Fxb1]、[Fxb2]分别是地面对前后轮的制动力。
为使汽车在制动时其方向能够保证稳定和安全,汽车前轴和后轴的制动力在分配时范围不应超过安全区域[9]。将所需数据代入式(4)可绘制制动力分配曲线图,如图2所示。
1.2 制动力分配
本文所设计的制动控制策略按照图1中的曲线ABCDE分配制动力,从而保证汽车在不同制动强度下的安全性;同时,使汽车的前轴制动力在分配时比例达到最大,以保证回收的制动能量最大化。
结合计算公式,可求得图2制动力分配曲线中[B]、[C]、[D]三点的制动强度[Z]分别为0.31、0.40、0.53。[B]点是M曲线与横轴的交点,当[Z]小于0.31时,按照[AB]线分配制动力;当[Z]在[0.31 0.40]范围时,按照[BC]线分配制动力;当[Z]在[0.40 0.53]范围时,按照[CD]线分配制动力;当[Z]大于0.53时,按照DE线分配制动力。
1.3 模糊控制器设计
设计模糊控制器时,影响汽车再生制动的因素有很多,本文选择其中三個主要因素:制动强度、电池荷电状态、车速。以上述三个因素为输入变量,以电机制动力比例[K]为输出变量,以上变量的隶属度函数取值范围全部为[0 1][10]。由于当SOC大于0. 85或者小于0. 15时,对其进行充电会影响电池的寿命[11],故将电池SOC 划为三个子集:{ [L]( 低) ,[M]( 中) ,[H]( 高) } 。将制动强度[Z]和速度[V]划为:{ [L]( 低) ,[M]( 中) ,[H]( 高) }。如图3所示为模糊控制器隶属度函数。表2所示为模糊控制器规则。
1.4 仿真模型建立
在ADVISOR和Simulink中建立模型,然后,联合MATLAB进行仿真。控制策略模型如图4(a)、图4(b)所示。ADVISOR整车模型如图5所示。
从图4可以看出,前向制动力模型中有6个输入信号,分别为:前轮最大制动力信号1;当前车轴角速度信号2;前轴的实际再生制动力信号3;总制动力信号4;后轮最大制动力信号5;电池电量值SOC。同时,该模型中有2个输出变量,分别为前、后轮实际提供的摩擦制动力。后向制动力模型中有5个输入信号,分别为:起始速度信号1;下一个步长的请求速度信号2;总制动力需求信号3;时钟信号Clock;电池电量值信号SOC。输出变量2个,分别为前、后轮所需的摩擦制动力。两个模块中的制动力都按照[Z]值的范围,以不同的模块进行分配。即:当 [Z]小于0.18 、属于[0.18 0.51] 、属于[0.51 0.63]、大于或等于0.63时,分别按照模块[AB]、[BC]、[CD]、[DE]进行分配。
2 仿真结果分析
因ADVISOR中CYC_UDDS循环工况的制动较为频繁且与实际的行驶车况较为符合,故选取该工况作为仿真工况。如图6所示为再生制动策略改进前后的电池SOC值。如图7所示为再生制动策略改进前后純电动汽车的续驶里程对比。
由图6可知,再生制动策略改进后,电池SOC值高于原控制策略约0.02,即改进后电池能耗减慢,从而提高了纯电动汽车的续驶里程。
由图7可以看出,在电池电量几乎耗尽时,模型中原控制策略汽车的续驶里程为35.97 km,而改进后汽车的续驶里程为42.48 km,改进后汽车续驶里程提高了6.51 km。
如图8所示为再生制动策略改进前后的电池电流对比。如图9所示为再生制动策略改进前后的电机输出转矩对比。
由图8可以看出,控制策略改进后其电池电流值比原策略减小约17 A,即减少了对电池的伤害,有效延长了纯电动汽车的使用寿命。
由于电机在驱动状态下输出的转矩数值为正,而本文的研究仅仅改进了其制动策略,驱动力不变;因此,图9中电机的正转矩是重合的。然而,当汽车在实际制动时,电机输出的转矩数值为负,从图9可以看出,改进后的策略使输出负转矩数值明显增大,即制动时电机制动力所占的比例增大,从而能够承担较多的制动力,回收更多的制动能量。
3 结语
针对纯电动汽车制动能量回收效率较低的问题,本文制定了一种基于模糊控制的再生制动控制策略。通过仿真,得到以下结论:(1)所设计的模糊控制策略更加明确地划分和分配了前、后轴制动力,在保证稳定性前提下使前轴能承担更高的制动力分配比;(2)通过设计模糊控制器,建立相应的模型,使制动能量的回收得以增加;(3)改进后的控制策略使电池受到的最大电流冲击减小约17 A,电池SOC值增加了0.02,汽车续驶里程提高了6.51 km,有效延长了纯电动汽车的使用寿命。
参考文献:
[1] 周孔亢,陈燎,盘朝奉,等.基于复合电源恒流控制的电动车再生制动系统[J].机械工程学报,2013,49(20):78-83.
[2] 王猛,孙泽昌,卓桂荣,等.电动汽车制动能量回收最大化影响因素分析[J].同济大学学报(自然科学版),2012,40(4):583-588.
[3] 顾钰,何仁,王骏骋.轮毂电机电动汽车再生-液压复合制动系统协调控制策略[J].重庆理工大学学报(自然科学),2020,34(6):32-40.
[4] 赵国柱,孙琼琼,唐惊幽,等.基于载荷率的电动公交车再生制动控制策略[J].中国机械工程,2017,28(19):2372-2377.
[5] 刘丽君,姬芬竹,杨世春,等.基于ECE法规和I曲线的机电复合制动控制策略[J].北京航空航天大学学报,2013,39(1):138-142.
[6] 王耀南,刘东奇.电动汽车机电复合制动力分配策略研究[J].控制工程,2014,21(3):347-351.
[7] 靳立强,孙志祥,郑迎.电动轮汽车复合再生制动系统防抱协调控制[J].吉林大学学报(工学版),2017,47(5):1344-1351.
[8] 童成前,何仁,周燕,等.基于ECE法规的多轴汽车剩余制动性能分析[J].汽车工程,2011,33(8):689-693.
[9]李胜琴,汤亚平.基于ECE法规及I线的纯电动汽车制动能量回收策略研究[J].武汉理工大学学报(交通科学与工程版),2020,44(1):75-80.
[10] 赵迎生,赵又群,董颖.汽车联合制动系统制动力分配的优化控制[J].中国机械工程,2012,23(2):244-247.
[11] 李旭玲,刘梦,姜久春,等.计及循环寿命的锂离子电池优化使用研究[J].重庆理工大学学报(自然科学),2020,34(2):40-46.
责任编辑 盛 艳
