某型空空导弹控制组合数字装置深度修理
2021-11-26汪小龙高丽辉杨雷
汪小龙 高丽辉 杨雷
摘要:某型空空导弹控制组合数字装置是该导弹控制组合修理过程中故障率较高的分组件,由于数字装置内部逻辑电路复杂,使得控制组合故障定位较为困难。本文结合现场修理条件和技术对控制组合数字装置的工作原理进行了研究和分析,实现了该数字装置的深度修理。
关键词:导弹;数字装置;深度修理
Keywords:missile;digital device;deep repair
0 引言
某型空空导弹控制组合数字装置(以下简称数字装置)又称接收和编码转换装置,用来接收载机输出的32位双极性二进制串行码数字信号,通过接收转换电路,将串行码转换成并行数字信号并同时进行解码确认后,传送到相应的存储单元,然后再通过相应的电路将数字信号转换成模拟信号,输出到相应的接收部件。
1 工作原理
数字装置主要由电路板Ⅰ、电路板Ⅱ组成,其中,电路板Ⅰ为码接收器,电路板Ⅱ为指令变换器。原理框图如图1所示。从Uа、Uб的输入端输入的串行信息进入计数脉冲和信息脉冲形成器形成三路信息:信息脉冲、读数脉冲和计数脉冲。其中,信息脉冲进入移位寄存器,借助读数脉冲将信息并行记录到移位寄存器;计数脉冲与信息脉冲通过间隔选择器、字选择器、偶校验器和32位计数完毕脉冲形成器生成计数完毕脉冲。
移位寄存器输出的并行信息在计数完毕脉冲及“φ0”指令的作用下进入地址译码器和储存器,地址译码器对并行码1至8位地址码进行译码,储存器选择性储存并行码9至18位信息。最后,转换器对译码正确的译码器对应存储器的存储信息进行逻辑处理、D/A转换、电压转换后,产生对应的指令。
2 结构组成
2.1 码接收器
码接收器由计数脉冲和信息脉冲形成器、间隔选择器、字选择器、偶校验器、移位寄存器和32位计数完毕脉冲形成器等组成。
编码信息以国际上常用的ARINC429码形成。ARINC429是一种航空电子总线,最早用于将飞机各系统间或系统与设备间通过双绞线互连,是各系统间或系统与设备间数字信息传输的主要路径,类似于飞机的神经网络,其规范是在ARINC419的基础上起草的,但又独立于ARINC419。过去许多航空设备采用的航空总线种类各异,很难互相兼容,现代飞机电子系统要求各机载航空设备使用统一的航空总线,方便系统集成,ARINC429就是在这种需要下形成的规范。ARINC429具有接口方便、数据传输可靠的特点,目前是航空领域应用最广泛的航空电子总线,在导弹、雷达等领域也得到广泛应用。
ARINC429总线上有一对单向、差分耦合、双桥屏蔽线。每条线上的信号电压范围在+5~-5V之间。一条线称为A(或+),另一条称为B(或-)。线路上的码型为双极性归零码。两条线路的差分信号逻辑关系有三种:当A-B之间的差分电压为7.25~11V时,表示逻辑1;当A-B之间的差分电压为-0.5~0.5V时,表示NULL;当A-B之间的差分电压为-11~-7.25V时,表示逻辑0。
接收线路上的电压取决于线路长度和挂接在总线上的接收器的个数。ARINC429总线协议的字格式如表1所示。其中,第32位为奇偶检验位P,一般设置为奇检验,当1~31位含有偶数个1时,该位置为“1”,反之为“0”;第31、30位为符号/状态位SSM,用于标识硬件操作模式、条件以及有效数据;第29位为标记位SIGN;第28位到第11位为数据区位DATA;第10、9位为源/目的标识位SDI,当总线上有多个接收器时可通过该位获取有效数据;第8位到第1位为源/目标标志位LABEL,用于表示传输的类型。
上述字的发送顺序为:源/目标标志位、源/目的标识位、数据区位、标记位、符号/状态位和奇偶校验位。其中,源/目标标志位与正常顺序刚好相反,先发送高位再发送低位,即8、7、6、5、4、3、2、1、9、10、11……32的顺序。
此型导弹控制组合数字装置码接收器以双极性归零制的三态码调制方式进入Uа、Uб输入端(三态码调制方式如图2所示)。
当Uа输入端为正脉冲、Uб输入端为负脉冲时表示逻辑1;当Uа输入端为负脉冲、Uб输入端为正脉冲时表示逻辑0。32个脉冲组成一个字,字间隔为4T(T为脉冲周期,T≈21ms)。Uа、Uб输入端输入的串行信息进入计数脉冲和信息脉冲形成器形成三路信息:信息脉冲、读数脉冲和计数脉冲。其中,信息脉冲进入移位寄存器并借助读数脉冲将信息并行记录到移位寄存器。计数脉冲与信息脉冲通过间隔选择器、字选择器、偶校验器和32位计数完毕脉冲形成器生成计数完毕脉冲。
2.2指令变换器
指令变换器由+5V电源、“φ0”指令变换器、地址译码器、储存器、转换器、D/A基准电压组成。
指令变换器对码接收器产生的32位并行码中的前18位进行译码和指令转换。移位寄存器輸出的并行信息在计数完毕脉冲及“φ0”指令的作用下进入地址译码器和储存器,地址译码器对并行码1~8位地址码进行译码,储存器选择性储存并行码9~18位信息。最后,变换器对译码正确的译码器对应存储器的存储信息进行逻辑处理、D/A转换、电压转换后,形成指令:“高度0”“高度1”“高度2”“角度0”“角度1”“角度2”“目标类型1”“目标类型2”“目标类型3”“地面”和“速度”。
3 测试定义
数字装置对外端口较少,数据端口仅有9个(见表2)。根据数字装置故障情况以及目前的检测手段,对该型导弹控制组合检查及故障定位系统的工作原理、检测项目、检测流程进行了分析。对该设备测试程序中429检查模块进行归纳总结,分析源程序,形成429检查项目,如表3所示。
4 专用检测工具
针对数字装置故障情况,修理现场备有一个专用检测工具用于故障修复,专用检测工具如图3所示。
该专用检测工具在使用过程中输出A、B两路信号,两路信号经过差分运算后输出ARINC429协议规定的信息码(见图4),用示波器采集到的波形如图5所示。
5 数字装置故障分析及修理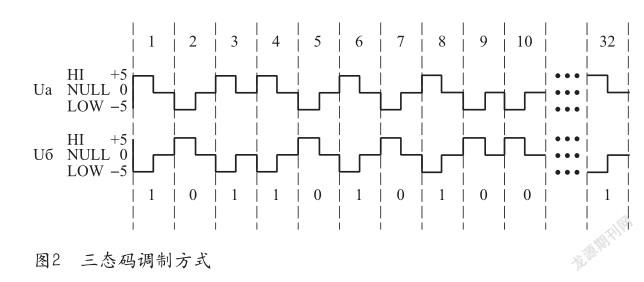
首先,对数字装置工作过程进行分析。Uа、Uб的输入端输入的编码信息进入脉冲启动比较器比较电平后,分别输出两路单极性脉冲信息(以下简称信息脉冲)。两路信息脉冲进行“与”逻辑处理,形成单极性计数脉冲与读数脉冲。
一路信息脉冲进入移位寄存器的数据输入端并借助进入时钟输入端的读数脉冲将信息并行记录到移位寄存器。为了准确记录,利用部分器件使读数脉冲预先延迟。当所有信息并行记录至移位寄存器,32位计数完毕脉冲形成器上形成计数完毕脉冲,信息即可并行读出。计数完毕脉冲由32位字选择器和偶校验器形成。计数完毕脉冲的持续时间由延迟电路决定。计数完毕脉冲在产生的同时使32位计数器清零。延迟一段时间后输出低电平,继续接收信息脉冲。
地址译码器对并行码1~8位地址码进行译码。若地址码正确则置“0”,地址码错误则置“1”。
储存器选择性储存并行码9~18位信息。若地址码正确后,相应的存儲器输出存储信息。
转换器对存储器输出信息进行逻辑处理、D/A转换、电压转换后,产生与表2对应的指令。
指令“速度”的D/A转换器将并行码11~18位信息转换为模拟电压信号,用于产生D/A基准电压。
“φ0”指令变换器将+27V“φ0”指令转换为+5V数字逻辑电平。
+5V电源将载机供给或导弹产生的+9V直流电压转换成+5V直流电压,供给数字电路各器件。
数字装置典型故障模式有:供电超差导致测试不合格;逻辑电路故障导致测试不合格。
5.1 供电超差导致不合格
一枚控制组合在进行故障检查429码测试过程中,测试不合格。具体表现为测试项目1、测试项目2、测试项目3均不合格。
针对此故障现象,对控制组合数字装置进行故障分析和排查工作。使用专用检测工具手动发送规定429码形1,使用示波器采集测试项目1的指定测试点1脚电压值为2.87V(不合格);使用专用检测工具手动发送规定429码形2,使用示波器采集测试项目2的指定测试点2脚电压值为2.91V(不合格);使用专用检测工具手动发送规定429码形3,使用示波器采集测试项目3的指定测试点3脚电压值为2.89V(不合格)。使用示波器所采集的参数与控制组合故障检查测试参数相一致。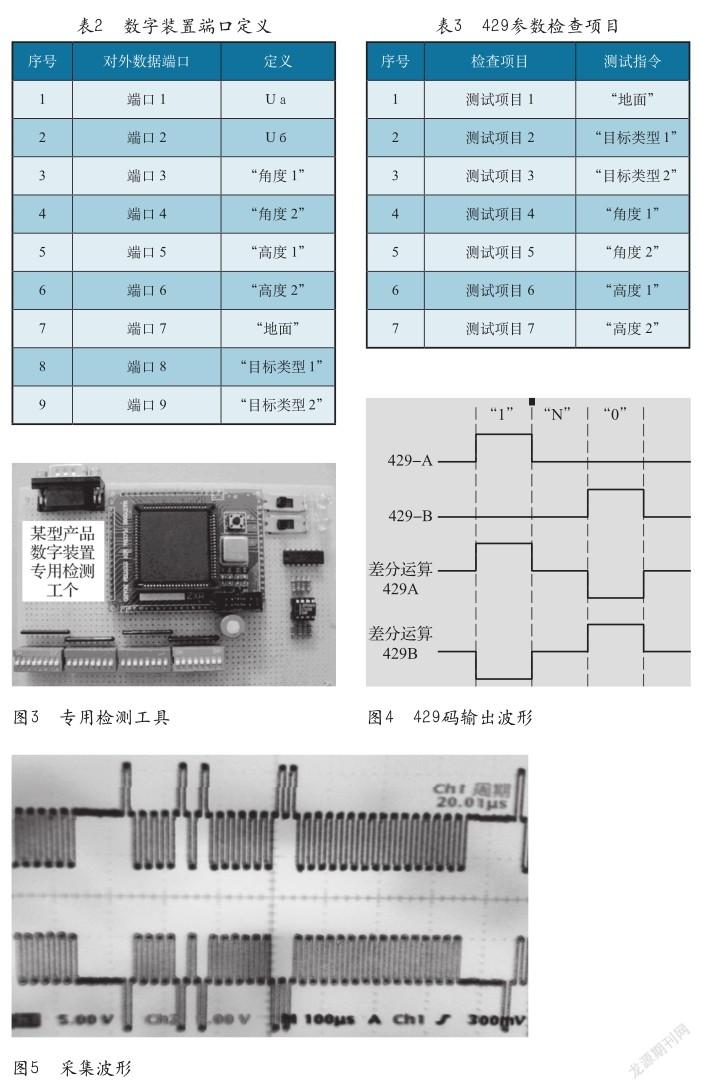
对照控制组合数字装置原理图进行分析,429码测试项目1、测试项目2、测试项目3均不合格,首先对数字装置的供电端进行检测,由于数字装置码接收器和指令转换器上的许多芯片均为5V电源供电,若供电端不合格,会导致后续电路输出端不合格。
+5V电源将载机供给或导弹产生的+9V直流电压转换成+5V直流电压供给数字电路各器件。使用示波器采集电路板Ⅱ的19脚,电压为+9V(合格);使用示波器采集电路板Ⅱ的45脚,电压为2.90V(不合格);电路板Ⅱ的45脚与电路板Ⅰ的39脚相连。使用示波器采集电路板Ⅰ的39脚,电压为2.90V(不合格)。查看电路板Ⅰ的电路图,电路板Ⅰ的39脚通过并联的极性电容C08和C02、电容C03和C04与电路板Ⅰ的38脚相连。电路板Ⅰ的38脚为+5V稳压输出滤波“地”,电路板Ⅰ的39脚为+5V稳压输出滤波“电源”。重点对电容C02、C03、C04、C08进行排查,通过测量发现极性电容C02故障。
更换故障电容C02后,使用专用检测工具分别发射429码形1、429码形2、429码形3,使用示波器分别采集指定测试点1脚、2脚、3脚,电压输出均合格。再通过测试设备对整个控制组合进行测试,测试结果合格,其中429码测试阶段测试项目1、测试项目2、测试项目3输出电压也合格,故障排除,完成修复。
5.2 逻辑电路故障导致不合格
一枚控制组合在进行故障检查429码测试过程中,测试不合格。具体表现为测试项目1、测试项目2、测试项目3、测试项目4、测试项目5均不合格。
根据故障参数对控制组合数字装置进行分析。使用专用检测工具手动发送规定429码形1,使用示波器采集测试项目1的指定测试点1脚电压值为0.01V(不合格);使用专用检测工具手动发送规定429码形2,使用示波器采集测试项目2的指定测试点2脚电压值为 0.01V(不合格);使用专用检测工具手动发送规定429码形3,使用示波器采集测试项目3的指定测试点3脚电压值为0.01V(不合格);使用专用检测工具手动发送规定429码形4,使用示波器采集测试项目4的指定测试点4脚电压值为0.05V(不合格);使用专用检测工具手动发送规定429码形5,使用示波器采集测试项目5的指定测试点5脚电压值为0.05V(不合格);使用示波器所采集的参数与控制组合故障检查测试参数相一致。
对照控制组合数字装置原理图进行分析,429码测试项目1、测试项目2、测试项目3、测试项目4、测试项目5均不合格,对数字装置供电端进行检测,供电端正常。其中,测试项目1的采集点连接数字装置电路板Ⅱ的触发器D21的1脚,测试项目2的采集点连接数字装置电路板Ⅱ的触发器D16的2脚,测试项目3的采集点连接数字装置电路板Ⅱ的触发器D16的1脚,测试项目4的采集点通过数字装置电路板Ⅱ的三极管VT2和非门D06的3脚连接,测试项目5的采集点通过数字装置电路板Ⅱ的三极管VT3和非门D06的4脚连接。由于上述5路信号输出均不合格,则应找出此5路信号的共同输入端。非门D06输入端受到触发器D01的影响,触发器D01、D16、D21的时钟输入信号均和非门D17的输出有关。对非门D17进行排查,非门D17完好;继续向前排查,检测与非门D18,分别采集D18的3、4、5、6脚信号与合格产品对比,发现与非门D18输出正常;再使用示波器对触发器D23进行排查,发现触发器D23的输入端信号合格,触发器D23的1脚输出波形合格,但是13脚无输出(合格产品D23的13脚有方波信号输出),由此判断触发器D23故障。
更换故障触发器D23后,使用专用检测工具分别发送429码形1、429码形2、429码形3、429码形4、429码形5,使用示波器分别采集指定测试点1脚、2脚、3脚、4脚、5脚,输出电压均合格。再通过测试设备对整个控制组合进行测试,其中429码测试阶段测试项目1、测试项目2、测试项目3、测试项目4、测试项目5输出测试结果也均合格,故障排除,完成修复。
6 结束语
通过该型空空导弹控制组合数字装置深度修理技术研究及实施,实现了控制组合数字装置故障元器件级修复,不仅提升了修理深度,还节省了修理成本,从根本上解决了空空导弹控制组合数字装置故障修理难题。
参考文献
[1] 李学干,苏东庄 计算机系统结构 [M].西安:西安电子科技大学出版社,1991.
作者简介
汪小龙,助理工程师,主要从事空空导弹修理技术研究。
