多效蒸发海水淡化系统可行域时变分析与全周期操作优化
2021-11-26陈春波罗雄麟孙琳
陈春波,罗雄麟,孙琳
(中国石油大学(北京)自动化系,北京102249)
引 言
淡水是人类赖以生存的资源,但淡水水资源短缺已成为制约人类社会发展的主要因素之一。尽管我国水资源总量很大,但人均占有量低,而且时空分布不均和水污染等问题加剧了我国水资源的紧缺[1]。然而我国拥有1.8 万千米的海岸线[2],合理利用海洋资源能够极大地缓解我国沿海城市的用水危机。为此我国近年来大力发展海水淡化产业,目前已取得显著成果。截至2019年底,我国已建成海水淡化装置172 个,淡水产能达到175.29 万m3/d[3],其中以多效蒸发(multi-effect distillation, MED)与反渗透法(reverse osmosis, RO)海水淡化技术为主[2,4]。多效蒸发海水淡化技术以其产品水质好、热效率高、能利用低品位热源和能与其他技术结合等独特的技术优势[5-6],被广泛应用和研究。
目前,制约多效蒸发海水淡化技术应用的主要问题是淡水生产成本,其中蒸汽费用占比高达34.76%[7]。为此研究者们从很多方面对MED技术进行了研究,期望改进生产工艺,降低制水成本。Jamil等[8]从能耗、损失、传热面积和淡水成本等方面对不同进料模式进行了对比分析。Khalid 等[9]通过研究证明引入热蒸汽压缩机(thermal vapor compressor, TVC)能够有效提升MED 系统的性能,发现了热蒸汽压缩机的最优布置。Carballo 等[10]通过优化进料海水和外来蒸汽的流量和温度分别实现了损失的最小化和淡水产量的最大化。Esfahani等[11]研究了效间温差、蒸汽流量和海水预热温升等变量对MED 系统性能的影响,并利用基于遗传算法的多目标优化对年总成本和造水比进行了优化。鉴于蒸汽的高成本,还有学者对新型能源驱动的MED 海水淡化系统进行了研究,包括太阳能[12]、核能[13]、风能[14]、地热能[15]等,为海水淡化的发展提供了新的思路。此外,基于MED 的新型海水淡化技术也逐渐涌现[16-18],有望突破单一海水淡化技术的能效上限,是未来海水淡化技术的发展方向之一。
尽管MED 海水淡化技术的相关研究蓬勃发展,实际生产中MED 装置的运行情况却不容乐观。自MED 海水淡化技术问世以来,污垢累积一直是该技术面临的最严重的问题之一。虽然低温多效蒸发海水淡化技术的面世减轻了这一问题,该技术通过降低蒸发器压力使海水蒸发温度低于70℃,减缓了海水中盐分析出导致的污垢累积。但MED 系统仍不可避免地受到结垢的影响[19-20],导致系统耗能增加、淡水产量降低[21],甚至需要定期停机清垢。对此,一般的应对策略是增大换热面积以避免污垢热阻增大影响系统正常传热[22]。Tahir等[23]预测了蒸发器传热系数随时间的变化,并将其集成到MED 模型中,避免了换热面积的冗余设计,延长了系统的停机周期。
上述研究均从设计角度讨论应对MED 系统污垢累积的方法,但对于已投入运行的系统,其系统结构和蒸发器面积均固定,无法通过增加换热面积减弱污垢累积的影响。MED 系统的操作优化可以提高已有装置的运行性能,但已有的针对该系统的操作优化研究均为稳态优化,忽略了污垢热阻的增长。实际上,MED 系统是一类长周期运行的慢时变系统,其系统状态和最佳操作条件会随着污垢的累积逐渐变化[24],因此稳态优化无法获得良好的MED系统全周期运行结果[25]。如果能在优化中考虑污垢累积问题,就能通过合理的操作优化手段,降低MED系统的能耗,减少淡水生产成本。
为此,本文首先将常规操作优化方法应用于八效MED-TVC 海水淡化系统,验证了一般稳态优化方法无法使该系统在全周期内获得良好的运行效果,系统会出现淡水产量降低、蒸汽消耗量过高的问题。随后提出了MED-TVC 系统操作条件可行域的概念,当每效的进料流量和蒸发器压力不在可行域内时,系统将无法完成正常的淡水生产。接着利用操作点与可行域的位置关系,分析了常规优化中淡水产量下降、能耗升高的原因。常规优化无法预测优化结果在整个生产周期内的运行情况,据此提出了MED-TVC 系统的全周期操作优化方法,通过全周期内不断变化的操作条件应对污垢累积,并利用时变可行域约束确保优化结果满足生产要求。结果表明,时变约束的全周期操作优化不仅能保证MED-TVC 系统在全周期内完成淡水生产任务,还能很大程度上减少蒸汽消耗,证明了该方法的有效性。
1 问题提出
1.1 MED-TVC系统简介
低温多效蒸发海水淡化系统结构复杂,一般由蒸发器、预热器、闪蒸罐和冷凝器组成。为了提高装置的热效率,多数装置会配置蒸汽喷射器或机械压缩机。图1 是一个典型的多效MED-TVC 海水淡化系统的示意图。该系统由多个串联的单元组成,每个单元包括蒸发器、预热器和闪蒸罐,被称为一效。进料海水经过多个预热器预热后,进入每效蒸发器,在来自上一效的加热蒸汽的加热下蒸发产生二次蒸汽。二次蒸汽中的小部分进入该效预热器预热海水,大部分进入下一效用作下一效的加热蒸汽。换热管内的加热蒸汽冷凝水进入闪蒸罐,回收剩余热量,闪蒸产生的少量蒸汽也用作下一效的加热蒸汽。末效用冷凝器取代了每效预热器,利用过量的海水将末效二次蒸汽冷凝成淡水,并排出多余海水。冷凝器能够使进入末效的进料海水温度稳定在固定值,减少环境和末效二次蒸汽产量对整个系统的扰动。该系统中,TVC 装置利用高温高压蒸汽从末效二次蒸汽中抽出一部分作为引射蒸汽,与外来驱动蒸汽混合,共同作为首效的加热蒸汽。

图1 八效MED-TVC海水淡化系统示意图[25]Fig.1 Schematic diagram of the MED-TVC system with eight effects[25]
实现蒸发器串联的关键是效间压差。由于海水的沸点和二次蒸汽温度由每效蒸发器内的压力决定,效间压差的存在使得每一效的海水蒸发温度均低于上一效的二次蒸汽温度,即该效的加热蒸汽温度。这一温度差保证了当前效的传热温差,使海水能够顺利蒸发产生二次蒸汽。
MED-TVC 海水淡化系统在运行过程中无化学变化,工作机理简单,该系统的数学模型主要根据物质守恒、能量守恒、汽液相平衡以及传热方程建立,关于MED 系统的稳态模型和动态模型研究很多[26-27]。在此基础上,增加了每效蒸发器的污垢累积方程,建立了MED-TVC 系统的全周期模型,该模型已被验证准确有效[25]。式(1)给出了所用污垢热阻的积分表达式,该式能够反映操作条件变化对于蒸发器内污垢累积速率的影响。

其中,c(t)为蒸发后海水浓度;T(t)为海水温度;Γ(t)为海水喷淋密度;t为装置运行时间;α、β、γ为模型系数,表示海水流量和浓度对污垢累积速率的影响程度,徐志明等[28]针对析晶污垢过程给出了具体的取值。
1.2 MED-TVC系统的常规优化问题
由于MED-TVC 系统采用海水作为原料,且存在海水的浓缩过程,尽管已经控制海水蒸发温度在70℃以下,但仍不可避免地存在盐分析出导致的污垢沉积问题,使得MED 系统需要定期停机清垢。该系统的运行周期一般为1.5~2年[29-30],因此MED系统是一类典型的长周期、慢时变的大型非线性系统。这类系统的操作优化一直是过程控制与优化的难题,已有的研究以稳态分析优化为主,并未考虑污垢累积的长期影响。因此以八效MED-TVC 海水淡化系统为例,研究一般的稳态优化方法在对这类系统进行操作优化时存在的问题。
对于一个给定的八效MED-TVC 海水淡化系统,其固定进料条件和设计运行参数如表1所示,其中每效进料流量(i=1,2,…,N)、效间温差ΔT(i)(i=1,2,…,N)、各预热器中海水温升ΔTp(i)(i=1,2,…,N-1)(第8效冷凝器出口温度固定)以及TVC引射蒸汽流量Fent均为可调参数。操作条件固定时,驱动蒸汽流量Fmot由淡水产量Ffre决定。造水比(gain output ratio, GOR)为MED-TVC 系统的性能衡量指标,表示每单位质量的驱动蒸汽能够产生的淡水质量。
表1 八效MED-TVC系统设计运行参数[25]Table 1 Specifications of the MED-TVC system[25]
对于MED-TVC 海水淡化系统而言,在满足额定的淡水产量要求的前提下,尽可能地减少系统运行能耗是操作优化的关键。因此在稳态优化中选择驱动蒸汽流量为目标函数,并添加淡水产量等式约束,形成了式(2)所示的MED-TVC 系统稳态操作优化问题。

其中,x为MED-TVC 系统的状态向量,包括传热系数、蒸发后海水温度、每效二次蒸汽产量等;u为决策向量,u=[(i), ΔTp(i),Fent];ẋ=f(x,u)和g(x,u) =0 分别为MED-TVC 系统的微分方程和代数方程。Frated=75.81 kg·s-1,使系统的淡水产量Ffre在优化中为固定值,以保证装置的基本淡水产能;Tmax=70℃,用于控制盐水顶值温度(top brine temperature,TBT)不超过70℃[31],避免污垢累积过快;ΔTmin=2℃,保持效间温差ΔT(i)高于2℃,使每效蒸发器满足最低传热温差。由于稳态模型中没有污垢随时间的累积,因此式(2)中不考虑污垢热阻。
对于式(2)所述复杂非线性系统的约束优化问题,利用序列二次规划算法(sequential quadratic programming,SQP)完成了该问题的求解,具体的优化结果见表2。作为对比,该系统的设计操作条件也在表中给出。

表2 MED-TVC系统的操作条件稳态优化结果与设计值对比Table 2 Comparison of operating conditions between steady-state optimization and design
表2显示,相比于设计值,稳态优化大幅减少了每效进料流量,缩小了效间压差,调整了进料海水的每效预热温升,引射蒸汽流量也因为外来蒸汽流量的减少而有所降低。经过稳态优化,外来驱动蒸汽流量显著减小,在淡水产量相同的情况下,系统单位时间的蒸汽消耗量(Fmot)降低了12.6%,可见稳态操作优化对于系统性能有很大的提升。
表2中的驱动蒸汽量仅是稳态优化结果,MEDTVC 运行周期较长,其运行状态会随时间改变[24],驱动蒸汽流量也会随着系统性能的减退有所上升。为了验证稳态优化结果的全周期适用性,参考一般MED 系统的运行周期,假设该系统的运行周期为2年,利用全周期MED-TVC 模型模拟设计条件和稳态优化结果下的全周期运行结果,获得了两种操作条件的全周期驱动蒸汽消耗速率和淡水产量曲线,如图2所示。
由图2(a)可见,尽管稳态优化结果的蒸汽消耗速率在运行初期低于设计值,拥有良好的运行效益。但随着装置的运行,其蒸汽消耗量迅速升高,并在运行中期达到设定的蒸汽流量上限20 kg·s-1。此时MED-TVC 系统无法再通过增加驱动蒸汽流量稳定淡水产量,稳态优化的淡水产量也不可避免地下降,如图2(b)所示。相比于稳态优化结果,设计条件下该系统的驱动蒸汽消耗量虽有所上升,但淡水产量能够在整个周期内稳定在设计值75.81 kg·s-1,其全周期运行状况优于稳态优化结果。
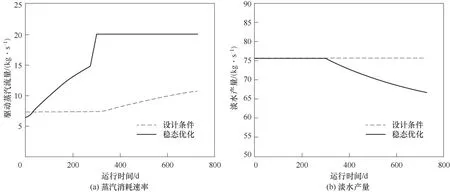
图2 两种操作条件下的全周期淡水产量和蒸汽流量变化Fig.2 Full-cycle variations in steam consumption and fresh water production under two operating conditions
由此可见,稳态优化只追求MED-TVC 系统的初期运行效益,无法保证其全周期的运行性能,因此常规的稳态优化手段无法处理MED-TVC 这类含有慢时变特性且长周期运行的系统。如何利用优化手段,使系统在全周期内都能获得良好的运行结果,是这类长周期、慢时变系统需要克服的难题。
2 MED-TVC系统可行域分析
2.1 可行域模型及性质
在对MED-TVC 系统进行操作条件分析时发现,每效的海水进料流量和蒸发器压力的变化存在限制,即存在Ff(i)-P(i)的可行域,一旦操作条件超出可行域,该效的海水蒸发将无法顺利进行,二次蒸汽产量也将低于预定目标。MED-TVC 系统的淡水产品由每效二次蒸汽冷凝水组成,一旦单效的二次蒸汽产量低于设计值,整个装置的淡水生产也势必受到影响。
以MED-TVC 系统的第二效为例,为了分析操作条件对单效性能的影响,利用该系统的数学模型研究了二次蒸汽产量为设计值11.28 kg·s-1时,进料流量和压力的变化对该效加热蒸汽需求量的影响。其中进料流量变化范围设计为50%~150%,即15~48 kg·s-1。为保证效间温差高于2℃,设计该效压力变化范围为22.86~25.01 kPa。图3 给出了不同进料流量和压力的操作条件下,产生等量二次蒸汽所需的加热蒸汽流量。该效的设计操作点(Ff(2)=31.59 kg·s-1,P(2)=23.92 kPa)也在图中给出。

图3 操作条件对单效性能的影响Fig.3 Effect of operating conditions on the single effect performance
分析范围内的白色部分表示二次蒸汽产量未达到设计值的操作点,即无论提供多少加热蒸汽,该部分的操作条件都无法满足单效的生产要求,验证了单效操作条件存在可行域。此外,对于能够满足设计二次蒸汽产量的操作点(图中彩色部分),进料流量和压力越小,所需的加热蒸汽也越低,该效的运行效益也越高。图3说明每效的运行效益与操作点的位置有直接关系,且操作点在可行域内能够确保该效满足二次蒸汽产量的设计值,而且进料海水流量和压力越低、操作点距离可行域边界越近,所需加热蒸汽流量越低。
图3 表明可行域存在一条边界曲线,为了便于研究,考虑各种影响因素,以大量基于MED-TVC 系统模型的仿真为基础,建立了各效可行域边界的数学模型,如式(3)所示。

其中

表示第i效的设计二次蒸汽产量,表示该效的加热蒸汽温度,表示该效的污垢热阻值为进料流量对应的该效蒸发器压力边界值,也即满足设计二次蒸汽产量的压力上限。
可行域边界为每效的操作条件划定了一个容许范围,只要操作点(Ff(i),P(i))在该范围内,就能确保该效海水的正常蒸发。需要注意的是,可行域的范围与该效污垢热阻值有关,因此即使MED-TVC 系统的操作条件固定,其可行域也会随着污垢的累积发生变化,即可行域存在时变特性。
2.2 基于可行域的常规稳态优化方法分析
对于MED-TVC 系统每一效的任一工作点,均可以通过其与可行域的位置关系判断其运行性能。本节基于已建立的可行域模型,分析1.2 节常规优化方法存在的问题。以第四效为例,绘制稳态优化和设计条件下该效在全周期内不同时期的可行域以及操作点位置,如图4所示。
由式(3)可知,可行域的范围受多种因素影响,即使系统的操作条件不变,污垢累积也会导致可行域发生变化,因此图4 中可行域边界随时间逐渐偏移。图4(a)中每效的污垢热阻的升高,导致其可行域逐渐收缩,说明能够满足生产要求的操作范围逐渐变小,不利于装置的运行。由于稳态优化的操作条件保持不变,且优化结果距离初始可行域边界过近,因此操作点在装置运行半年后就超出可行域边界,导致该效的运行出现问题。其余各效也同样如此,这导致了图2 稳态优化结果中驱动蒸汽流量的迅速升高和淡水产量的快速下降。
与此相反,图4(b)显示,在设计条件下,第二效的可行域尽管同样存在收缩,但收缩程度较小,其操作点一直在可行域内。这使得设计运行条件虽然在前期运行性能低于常规优化结果,但其能在全周期内完成给定的淡水生产任务,因此其全周期运行结果优于稳态优化。
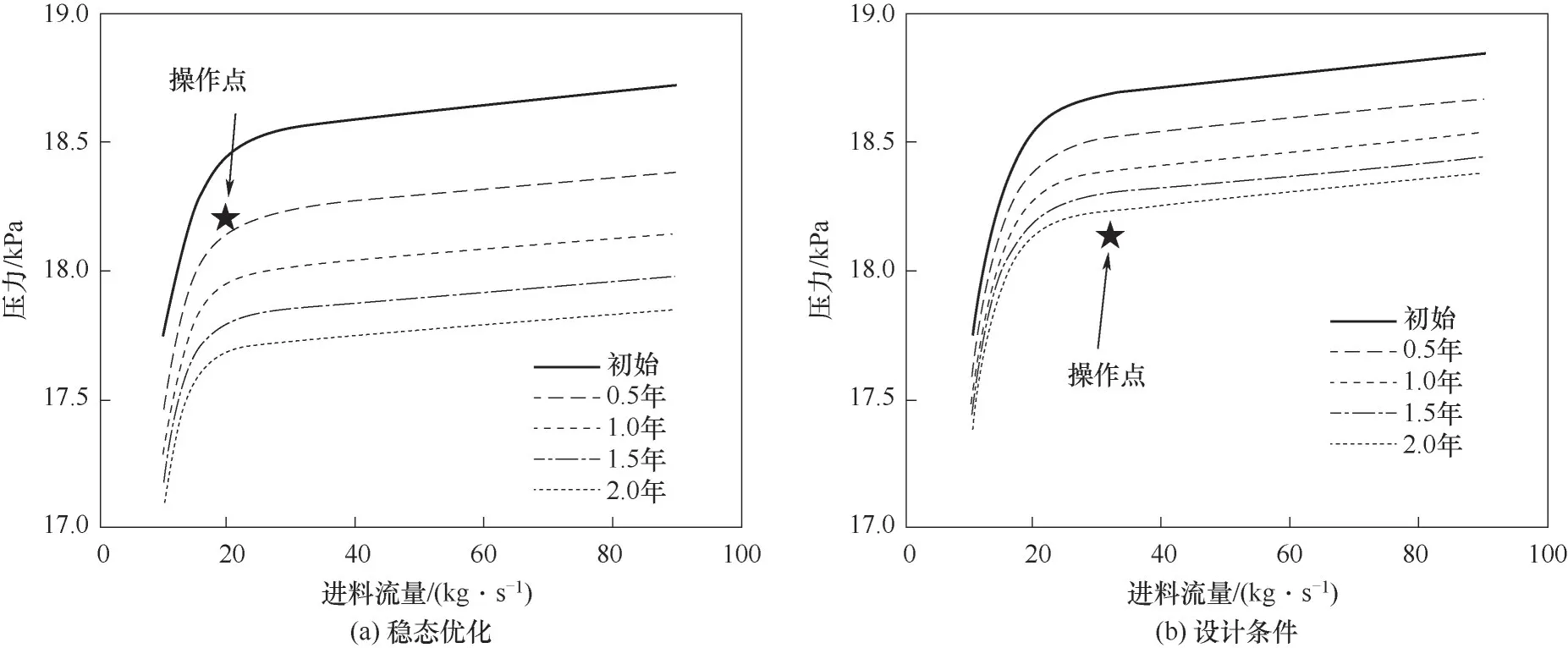
图4 稳态优化和设计条件下的单效可行域全周期变化Fig.4 Variations of single-effect feasible region in the full cycle under the steady-state optimization and design conditions
造成这一现象的原因是稳态优化没有考虑操作条件的长期影响,其优化结果中进料流量过低,导致蒸发后海水浓度过高,加剧了污垢累积[32]。由于可行域受污垢热阻影响较大,因此稳态优化结果中,可行域收缩更加明显。这也导致了稳态优化结果无法在长周期运行时保持良好的运行效益。
3 时变约束下的全周期操作优化
上节利用可行域解释了稳态优化直接应用于MED-TVC 系统操作优化时性能快速降低的原因,可行域因污垢累积而收缩,导致操作点超出可行域是这一问题的根源。如果在优化时能够控制操作点在整个周期内都位于可行域内,就可以避免出现稳态操作优化中的问题。但由于稳态优化方法无法预测优化结果在整个周期中的表现,因此无法用于这类慢时变、长周期的系统的操作优化。据此提出了一种时变约束的全周期操作优化方法,用于解决MED-TVC系统的操作优化问题。
3.1 全周期操作优化问题描述
不同于稳态优化,全周期优化方法依赖于系统的全周期模型,其操作条件的优化结果也会在全周期内变化。为了获得MED-TVC 系统在整个生产周期内的最佳运行效益,选定全周期优化目标函数为外来驱动蒸汽消耗速率的积分,即全周期蒸汽消耗量。
为了避免优化后的工作点超出可行域,需要在全周期优化问题中添加操作条件约束。由于MEDTVC 系统的每效污垢热阻随时间不断增长,其可行域是时变的。因此以时变约束的形式,对优化过程进行限制。时变约束下的MED-TVC 系统全周期操作优化问题如式(4)所示。

由于MED-TVC 是复杂非线性系统,无法通过解析求解得到优化问题的解,因此利用控制向量参数化(control vector parameterization, CVP)方法,将该系统的整个运行周期分为12段,分别确定每个时间段内的决策变量值,实现全周期驱动蒸汽消耗量最小化。
3.2 结果与分析
时变约束的全周期操作优化获得了MED-TVC系统在全周期内各个时间段的操作条件,具体结果见图5。对比表2中稳态优化结果可见,除进料流量外,每效压力、预热温升以及TVC 引射蒸汽流量在全周期初始的优化结果均相近。但全周期操作优化的结果在整个周期内不断变化,这是因为MEDTVC 系统的状态会随着污垢的累积逐渐改变,上一阶段的优化结果无法继续获得良好的运行效益,因此操作条件需要不断调整,以获得全周期内的最低能耗。
2.1 节的分析表明,可行域内进料流量越低,每效的运行性能越好。但进料流量低会导致蒸发后海水浓度过高,加剧污垢热阻升高,影响每效的运行经济性,甚至使操作点超出可行域,导致装置无法正常运行。进料海水流量的全周期优化结果高于稳态优化,能够有效减缓污垢累积。而且图5(a)中进料流量在全周期内的不断变化能够协调MEDTVC 系统的短期运行效益和长期运行效益,使系统的全周期蒸汽消耗量最低。
对于压力的全周期优化结果,图5(a)中前4效的蒸发器压力逐渐升高,后4效的压力逐渐降低,这使得每效间的压差升高。由于每一效的加热蒸汽来自于上一效,其温度由上一效的压力决定。因此效间压差的扩大能够提高每效传热温差,如图5(b)所示。图5(b)表明各效的效间温差在整个周期内逐渐上升,这种变化趋势可以有效应对污垢累积导致的总传热系数降低,维持每效的正常传热。
由于各效预热器的海水预热温升在全周期内变化很小,因此图5(c)中取每效平均值,与设计条件进行对比。由于末效无进料预热器,末效冷凝器出口海水温度固定为35℃,故未给出第8效预热温升。由图可见,全周期优化提高了第7效预热温升,降低了其余各效的预热温升,但海水总温升与设计条件接近。这使得除首末效外的每效进料海水温度升高,有利于各效的淡水生产。但这将导致第7 效产生的二次蒸汽中用于海水预热的比例更高,造成第8 效加热蒸汽减少。由于第8 效的二次蒸汽不流向其他各效,其产量减少对装置性能影响较小,因此总体上更有利于装置的能耗降低。
图5(d)显示全周期优化结果中TVC 引射蒸汽流量逐渐降低,而进入TVC 的外界驱动蒸汽流量逐渐升高。由于TVC 出口蒸汽,即首效加热蒸汽由这两股蒸汽混合形成,两者相反的变化使得出口总蒸汽流量基本不变,但出口蒸汽温度提高。
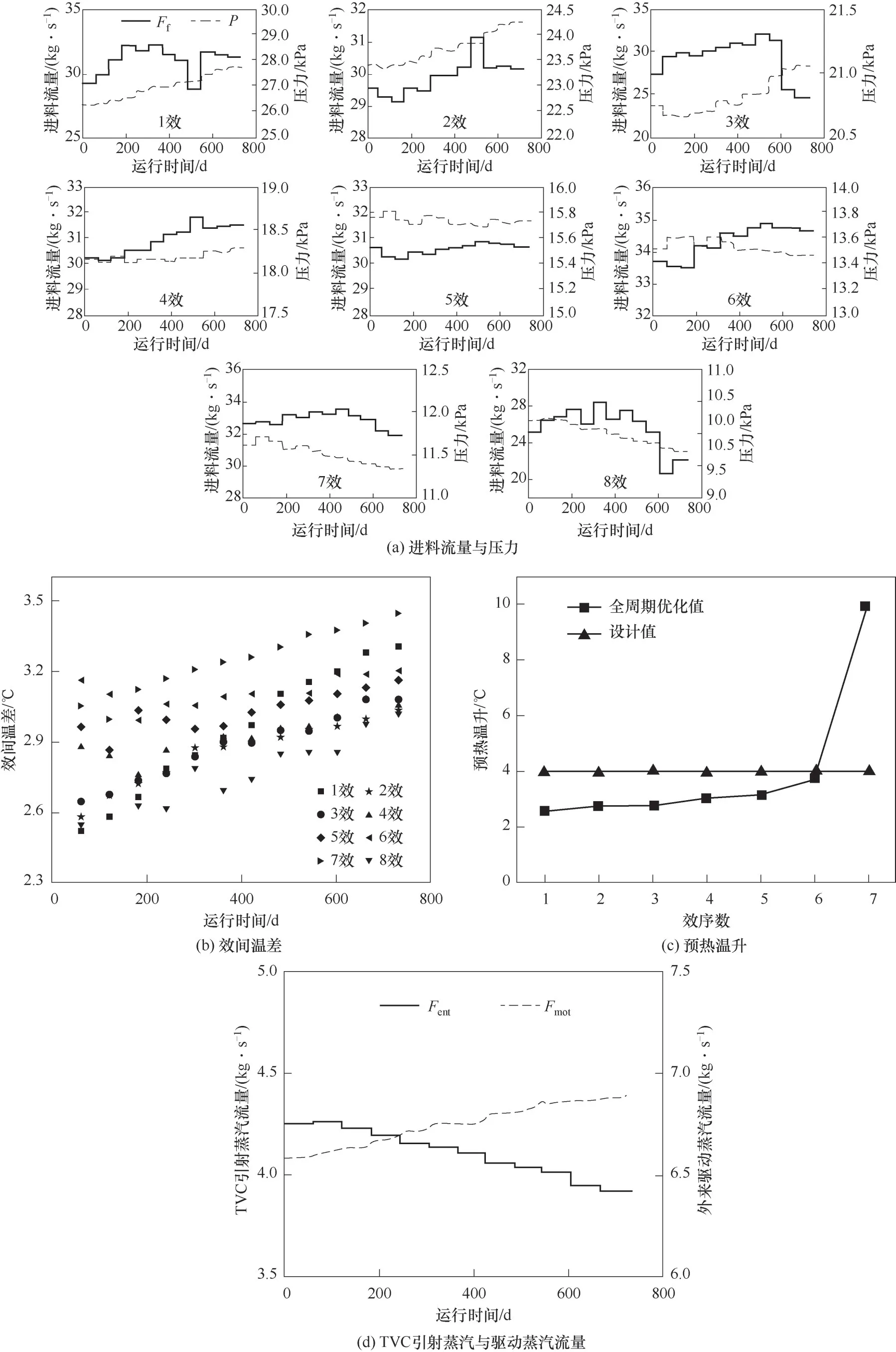
图5 MED-TVC系统的全周期操作优化结果Fig.5 Full cycle operating optimization results of the MED-TVC system
从可行域的角度能更好地理解全周期优化与稳态优化的区别。图6 以MED-TVC 系统中第4 效为例,显示了全周期优化后的可行域和操作点变化。图像显示,尽管可行域随着系统的运行不可避免地收缩,时变约束使得操作点一直处于可行域内,确保了优化结果能够完成正常的淡水生产。而且图6 中操作点与可行域边界之间的距离一直较近,使得系统在全周期内都能保持较高的运行性能。

图6 全周期优化的MED-TVC系统可行域及操作点变化Fig.6 Variations of feasible region and operating points of the MED-TVC system after full cycle optimization
表3给出了不同操作方案的全周期运行结果对比。从淡水产量、蒸汽消耗和造水比来看,稳态优化结果的各项指标均在全周期内有大幅度的下降,其全周期能耗也远高于设计条件。而时变约束下的全周期操作优化不仅能保持稳定的淡水产量,其蒸汽消耗速率也更低,相比于设计条件,其蒸汽消耗总量减少了19.6%。由此可见全周期优化方法能够很好地解决MED-TVC 这类运行周期较长的慢时变系统的操作优化问题。
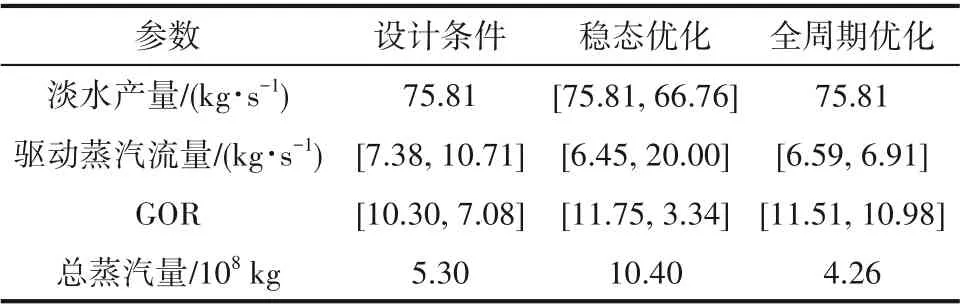
表3 设计条件、稳态优化和全周期优化运行结果对比Table 3 Comparison of design condition,steady-state optimization and full cycle optimization for full cycle operating results
4 结 论
MED-TVC 海水淡化系统是一类典型的慢时变系统,一般的稳态操作优化方法无法使该系统获得长期的良好运行效益。为此提出了MED-TVC 系统操作条件可行域的概念,能根据操作点的位置判断系统运行状况,并从可行域的角度分析了稳态优化方法存在的问题。随后提出了时变约束的全周期操作优化方法。该方法根据可行域的时变特性建立了时变约束不等式,保证优化结果能够满足淡水生产任务。同时将MED-TVC 系统的全周期蒸汽消耗总量作为目标函数,实现整个生产周期的能耗最低目标。优化结果表明,时变约束的全周期操作优化不仅避免了稳态优化中淡水产量下降的问题,相比于设计条件还减少了19.6%的外来驱动蒸汽消耗量。结果表明该方法能够用于MED-TVC 这类含有慢时变变量且运行周期较长的系统的操作优化,并获得比常规优化方法更好的优化结果。
符 号 说 明
a,b——可行域拟合参数
c——海水浓度,mg∙L-1
F——流量,kg∙s-1
F͂——可行域边界流量,kg∙s-1
k1,k2,k3——污垢热阻模型常数
P——压力,kPa
——可行域边界压力,kPa
Rf——污垢热阻,m2∙K∙W-1
T——温度,℃
TBT——顶值盐水温度,℃
ΔT——温差,℃
t——时间,d
u——决策向量
x——状态向量
α,β,γ——污垢热阻模型系数
Γ——海水喷淋密度,kg∙m-1∙s-1
上角标
(i)——效序数
下角标
ent——TVC引射蒸汽
f——进料海水
fre——淡水产品
h——各效加热蒸汽
max——上限
min——下限
mot——外来驱动蒸汽
p——预热器
rated——额定值
s——二次蒸汽
