串联式混合动力车辆制动能量回馈控制策略研究
2021-11-26伍丰张灵芝邓景新
伍丰,张灵芝,邓景新
串联式混合动力车辆制动能量回馈控制策略研究
伍丰,张灵芝,邓景新
(湖南铁路科技职业技术学院,湖南 株洲 412006)
论文介绍了混合动力车辆能量回馈技术的现状,明确了串联式混合动力车辆的传动系统结构和能量体配置方案,分析了目前混合动力车辆所采用的能量回馈控制策略的优缺点,提出了一种考虑能量体温度影响的制动能量回馈模糊控制策略,并通过仿真分析验证了该控制策略的可行性。
模糊控制;制动能量回馈;混合动力
前言
随着储能技术和电传动技术的不断发展,电动车辆因其具有环保、经济、节能、噪音小、加速快等诸多优点而越来越受到市场的认可,但由于高能量密度和高功率密度的储能技术问题并未完全解决,混合动力将是必经之路,混合动力车辆具有高性能、低排放、工作方式灵活等优点。如果能制定合理的控制策略,将大大降低燃油消耗,根据西门子ELFA系统的控制策略省油总结,混合动力车辆系统整体节油大于40%;而这40%的节油率中,制动能量回馈对节油贡献为20%,因此做好整车制动回馈可以使节能更加高效,延长车辆的电动续航里程。
1 混合动力车辆能量回馈技术
1.1 串联式混合动力的传动系统结构
按动力传输方式的不同,可以将混合动力分类分为:串联式、并联式、混联式、复合式。图1给出了这几种混合动力汽车的动力系统结构图。
并联式和混联式使用发动机和牵引电机两种动力源驱动传动机构,机械传动和电传动两种方式并存,由于存在机械传动,不能适用于全电化车辆,且混联式结构复杂,一旦设计有偏差故障率较高。串联式混合动力汽车通过发动机直接驱动发电机发电,发出的电能不仅可以给牵引电机提供电能,多余的电能还可以给能量体充电,让发动机始终工作在高效区。由于能量都以电能的形式传递,因此既可以适用于桥式电机方案,也可以用于轮毂电机方案,尤其适用于特种车辆的全电化改造;串联式混合动力在城市公交和乘用轿车上都有成熟应用,图2给出了采用串联式混合动力的雪佛兰沃蓝达传动系统布置图[1]。

1.2 储能装置
在用电动汽车的储能装置中,铅酸电池的历史最久,其1890年开始量产,具有价格低、技术成熟等优势,在目前的储能市场中占比近90%,但由于其能量密度只有30 W·h/kg~45 W·h/kg,使用寿命短,在混合动力汽车上使用较少,市场占有率也在逐年下降;镍氢电池比铅酸电池具有更高的比功率,但价格较高,如果在车上配备大容量的电池,将会大大增加车辆成本,因而镍氢电池一般只适用于电能配比较低的非插电式的混合动力车辆,锂电池虽然比功率不及镍氢,但克服了镍氢电池比能量低的缺点,因而在插电式的混合动力车辆上得到了广泛应用,各种储能装置的性能对比如表1所示。
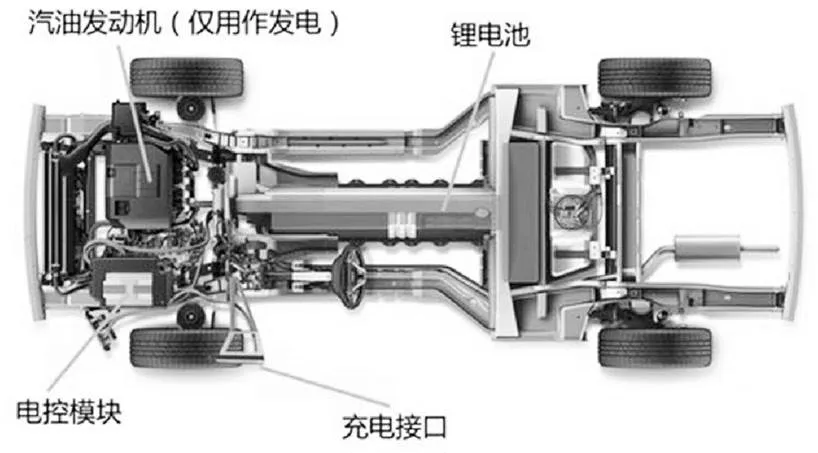
图2 雪佛兰沃蓝达传动系统布置图
从表1可以看出,锂电池和双层超级电容的性能正好能做到优劣互补,配备锂电池组合超容组的混合动力车辆可以拥有较强的纯电动续航里程和较大的瞬时电功率,因而本文所研究的混合动力车辆选用锂电池和双电层超级电容的组合方案,组合原理如图3所示,该方案可以通过调节双向DC/DC变换器的工作状态来控制超容组的输入和输出功率。
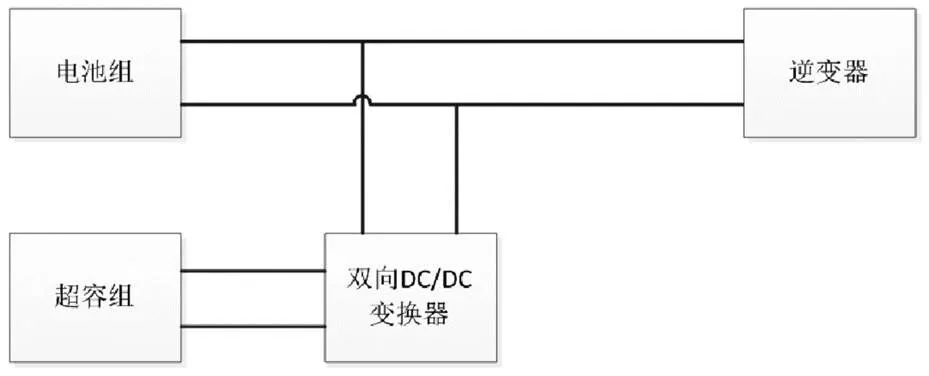
图3 储能装置组合方案
表1 储能装置性能对比
类型比功率/(W/kg)比能量/(W·h/kg)工作电压/V工作温度/℃循环寿命/次 铅酸电池100~30030~452−30~55400~600 镍氢电池500~1 000801.2−20~601 000 锂电池250~45090~1603.2−20~552 000 双电层超容7 000~12 0005~62.7−40~65100万 混合水系电容400~800121.5−20~555万 锂离子超容800~2 0008~124−25~7010万
1.3 能量回馈的一般控制策略
出于安全考虑,混合动力车辆的电制动一般要遵循以下基本原则,其一是车辆应在容许的范围内最大限度地回收制动能量,但如果车轮的滑移率大于0(0通常取0.2)时,应该放弃电制动改为机械制动以保证车辆的安全性;其二是分配给能量体的制动功率不能大于能量体的吸收能力;其三是要满足前后轮地面制动力分配曲线。为了高效地回收制动能量,需要对混合动力车辆的电制动和机械制动进行合理分配,目前使用较为广泛的是按制动强度进行分段,即当制动强度小于1(1的取值通常在0.1到0.3之间)时采用电制动,制动强度在1到2(2通常取0.7)之间时采用电制动和机械制动同时工作,当制动强度大于2时,出于安全考虑不再使用电制动,制动力全部由机械制动提供。
目前较为常用的能量回收策略有门限开关法和智能控制法,门限开关法是预先设置若干个门限值,当变量的值达到门限值后开启或关闭对应的功能,该方法控制思路简单,但由于控制规则固定,能量回馈的效率较低;随着智能控制技术的逐渐成熟,智能控制策略越来越多的应用到混合动力汽车中来,但大部分的研究都是针对牵引过程,文献尝试将模糊控制策略引入到制动过程中来,但因没有考虑到电池温度等参数,势必大大影响电池寿命和性能,不适宜在实际过程中应用[2]。
2 基于模糊逻辑的能量回馈控制策略
2.1 控制流程
制动能量回馈需要综合考虑制动强度、能量体吸收电功率的能力以及制动安全性等方面的问题,采用常规的控制方法逻辑复杂、回收效率较低,因而本文提出了一种以能量体电量、能量体温差和制动强度为输入,以代表电制动分配比例的电制动系数为输出的模糊控制策略,其控制流程为驾驶员踩下制动踏板后,前后轮制动分配器根据制动力分配曲线计算出分配给前、后轮的制动力,同时模糊控制器接收来自能量管理单元的锂电池电量、锂电池温度差、超容电量及制动强度信息,经过模糊推理和解模糊后输出电制动系数,制动力分配器综合制动强度、电制动分配系数、前轮制动力、后轮制动力等信息,计算出分配给液压制动和再生制动的制动力矩。在超容组和锂电池组的功率分配关系上,坚持超容优先的原则[3-4]。
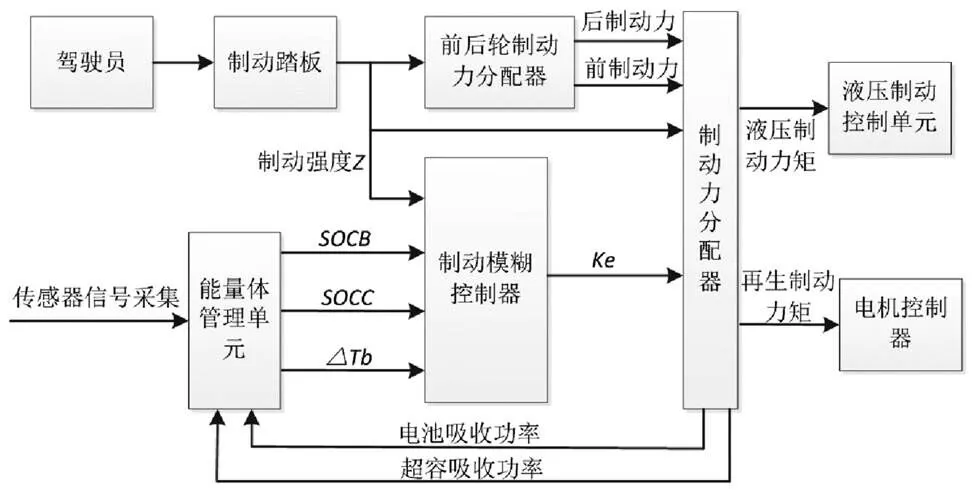
SOCB—电池组SOC;SOCC—超容组SOC;∆Tb—电池组当前温度与理想温度的差值;Z—制动前度;Ke—电制动系数。
2.2 模糊控制器的设计
2.2.1模糊化
本系统中制动强度、电池组SOC和超容组SOC的输入范围均是[0,1],∆代表的是电池组当前温度与理想工作温度之间的差值,对∆进行归一化处理后其输入范围也是[0,1]。对输入输出量论域做如下定义:()={LE,GE}、()={LE,GE}、(∆)={LE,ME,GE}、()={LE,ME, GE}、()={LE,ML,ME,MB, GE},以上定义中LE代表较小、ME代表中、GE代表较大、ML代表中小、MB代表中大。根据仿真对比,最终确立的隶属度函数如图5所示。

2.2.2模糊规则的建立
能量管理系统实时计算出电池组和超容组的剩余电量和温度,模糊控制器根据电量、温差、踏板等输入参数,通过模糊推理计算出相应的输出,根据实际运行要求,可以总结出如下的模糊控制规则:
(1)为了尽可能多地回收制动能量,在保证安全的前提下,优先使用电制动;
(2)制动强度较大时,由于机械制动的可靠性比电制动高,出于安全考虑,减小电制动的使用;
(3)若超容没有充满,考虑到超容能吸收较大的电功率,此时可以分配较大的电制动系数;
(4)超容的电量充满后,如果电池组的温差较小,且电池组没有充满,说明电池组可以吸收电制动功率,此时分配一个中等大小的电制动系数;
(5)超容和锂电池都无法吸收制动功率时,停止使用电制动。
根据以上规则建立如下的模糊规则表。
表2 模糊控制规则表
E(Z)=LEE(Z)=MEE(Z)=GE SOCBSOCC△TbKeSOCBSOCC△TbKeSOCBSOCC△TbKe LELELEGELELELEGELELELEML LELEMEGELELEMEGELELEMEML LELEGEGELELEGEGELELEGEML LEGELEGELEGELEMBLEGELEML LEGEMEGELEGEMEMELEGEMEML LEGEGELELEGEGELELEGEGELE GELELEGEGELELEGEGELELELE GELEMEGEGELEMEGEGELEMELE GELEGEGEGELEGEGEGELEGELE GEGELELEGEGELELEGEGELELE GEGEMELEGEGEMELEGEGEMELE GEGEGELEGEGEGELEGEGEGELE
2.2.3解模糊
解模糊采用工业控制中常用的加权平均法解模糊,其计算公式如下:
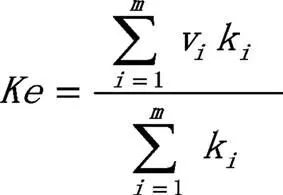
式中v为输入;k为加权系数;为模糊规则总数。
当解模糊后的输出量电制动系数大于0.9时表示制动能量全部由电制动吸收,小于0.1时表示不使用电制动,处于二者之间时电制动和机械制动同时使用。
2.2.4仿真验证
在MATLAB/Simulink中建立汽车的仿真模型,按整车参数表3设置好相关参数进行仿真分析,设置仿真时间16 s,
得到图7所示的仿真结果,其中踏板的输入为正时表示车辆处于牵引状态,输入为负时表示制动状态[5]。
表3 整车仿真参数表
参数名参数值参数名参数值 满载质量/kg1 310整备质量/kg1 100 轴距/m2.6质心高度/m0.56 风阻系数0.30迎风面积/m22.0 滚动阻力系数0.011电机额定功率/kW65 电池组配置/kwh14超容组配置/kwh0.25
从仿真结果(a)可以看出,制动强度很小或者为0时,分配了最大的电制动系数,制动强度增加后,电制动的分配系数有所减小,超容电量充满后,考虑电池的充电能量,电制动系数被进一步的减小;从仿真结果(b)可以看出,当车辆制动时牵引电机开始发电进行能量回馈,仿真结果与设计相符。

图6 仿真模型
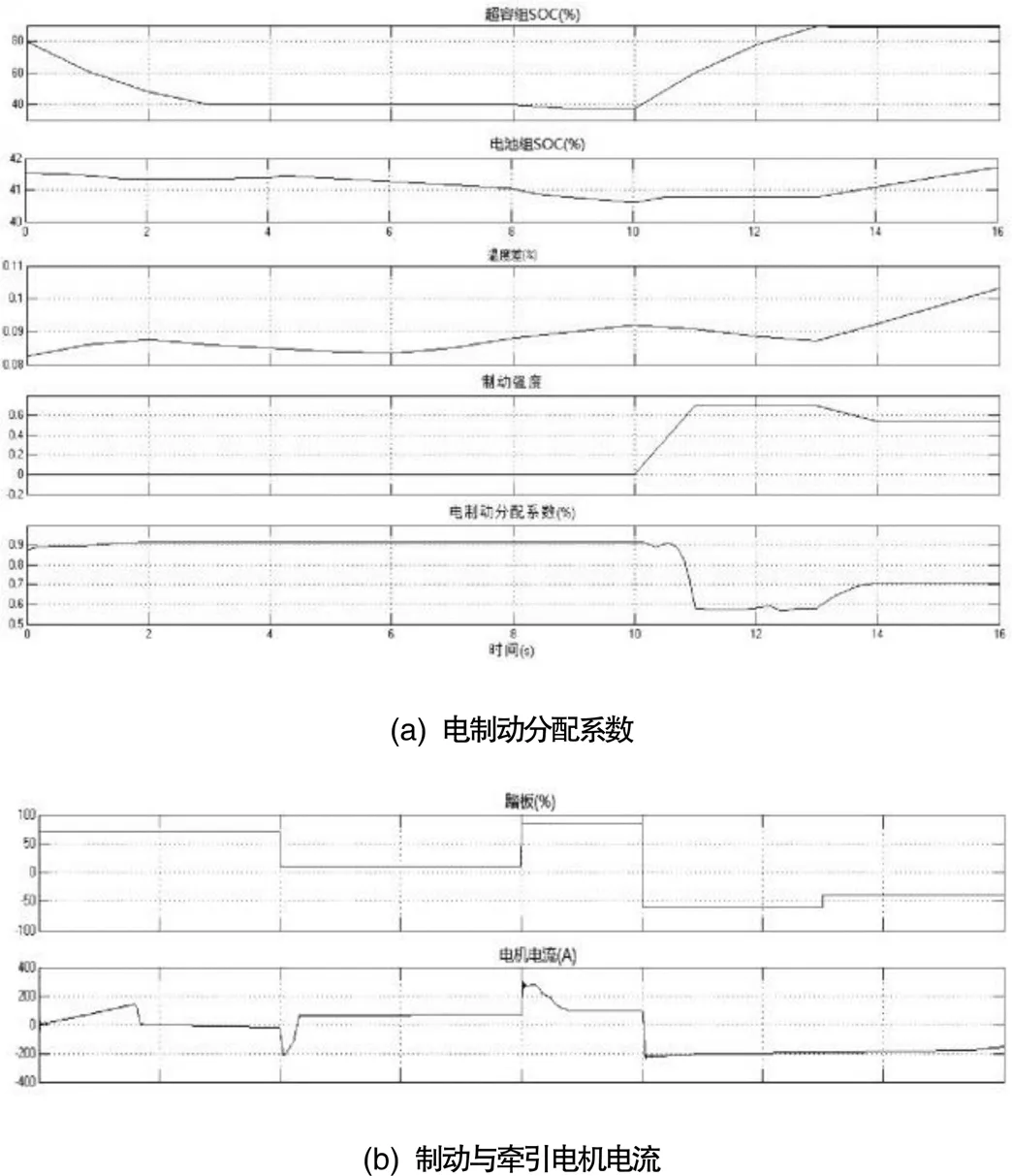
图7 仿真结果
3 结论
本文首先对混合动力车辆的传动系统结构、能量体配置、能量回馈的一般控制策略等做了介绍,通过对当前能量回馈策略的总结与优化,提出了一种使用制动强度、能量体电量、电池组温度作为输入,以电制动分配系数作为输出的模糊控制策略,并通过MATLAB仿真对制动控制策略进行验证。
[1] 黄禀通,朱建军,周忠伟,等.并联式混合动力汽车模糊控制策略优化[J].机械设计与制造,2020(12):293-297.
[2] 聂小博,熊玥,潘勇军.基于模糊PID算法的车身稳定控制策略与多工况联合仿真[J].动力学与控制学报,2021,19(03):46-52.
[3] 钟彦雄.混合动力汽车模糊逻辑控制策略研究[J].科技创新与应用,2021(01):135-138.
[4] 李明,胡博,葛帅帅,等.并联式混合动力汽车能量管理与模式切换控制研究[J].南京理工大学学报,2020,44(06):696-704.
[5] 雷霄,戴朝华,陈维荣,等.基于ADVISOR的燃料电池混合动力机车建模与仿真[J].电源技术,2015,39(12):2643-2646.
Research on Braking Energy Feedback Control Strategy of Series Hybrid Electric Vehicle
WU Feng, ZHANG Lingzhi, DENG Jingxin
( Hunan Vocational College of Railway Technology, Hunan Zhuzhou 412006)
This paper introduces the current situation of energy feedback technology of hybrid electric vehicles, defines the drive system and energy configuration scheme of series hybrid electric vehicles, analyzes the advantages and disadvantages of the current energy feedback control strategy used in hybrid electric vehicles, A fuzzy control strategy of braking energy feedback considering the influence of energy body temperature is proposed, and the feasibility of the control strategy is verified by simulation analysis.
Fuzzy control; Braking energy feedback;Hybrid electric vehicles
10.16638/j.cnki.1671-7988.2021.021.014
U463.2
A
1671-7988(2021)21-55-05
U463.2
A
1671-7988(2021)21-55-05
伍丰,硕士,工程师,就职于湖南铁路科技职业技术学院,研究方向为电气自动化技术。
湖南省教育厅科学研究项目(编号:20B393)。
