网联分布式驱动电动汽车整车控制器硬件电路设计
2021-11-26景峰周逢军韩冰孙帅帅
景峰,周逢军,韩冰,孙帅帅
网联分布式驱动电动汽车整车控制器硬件电路设计
景峰1,周逢军2,韩冰1,孙帅帅2
(1.北京理工新源信息科技有限公司,北京 100081;2.北京理工大学前沿技术研究院,山东 济南 250357)
在设计网联分布式驱动电动汽车整车控制器时,需要同时兼顾网联功能和分布式驱动控制功能,具有一定的复杂性。文章提出一种硬件电路的设计方案,扩展了分布式驱动新能源电动汽车4G通信和以太网通信的功能,增加了车辆与外界的交互,实现了车辆的远程监控。该方案可为开发车辆的远程控制、智能化、多媒体化以及与外界的互联互通等功能,提供技术支撑。
4G通信;以太网通信;分布式驱动电动车
引言
分布式驱动电动汽车是未来电动汽车发展的重要方向,具有驱动传动链短、传动高效、结构紧凑等优点[1-4]。智能网联汽车通过和周边车辆、道路、基础设施进行通信,从时间、空间维度扩大了车辆对交通与环境的感知范围,能够提前获知周边车辆操作信息、交通控制信息、拥堵预测信息、视觉盲区等周边环境信息[5-7]。为了充分发挥分布式驱动电动汽车和网联汽车的优势,本文提出一种把4G通信和以太网通信集成于VCU(Vehicle control unit,整车控制器)的方案,具有以下优点:
(1)减少系统设计冗余度,降低安装过程中造成的风险;
(2)实现车辆的远程监控;
(3)为实现车辆与外界的互联互通提供支撑:V2V(Vehicle to Vehicle,车与车)、V2I (Vechile to Infrastructure,车与基础设施)、V2P(Vehicle to People,车与人)、V2N(Vehicle to Network,车与云)、即V2X(Vehicle to Every- thing,车与任何事物的联系)功能;
(4)在此方案基础上,可通过以太网组建车内局域网,实现数据的高效传输。
1 硬件的设计方法
1.1 系统的架构和设计方案
VCU 控制器的功能划分比较细致,实现的功能也很丰富,这对方案设计带来一定挑战。本设计方案是在常规的 VCU 控制板基础上进行迭代升级:(1)通过升级主控 CPU,提高系统的外设接口,增加系统的算力和处理能力;(2)通过ASCLIN 扩展 4G 模组,实现 4G 网络通信功能;(3)通过扩展 PHY 接口系统增加以太网通信能力。系统功能框架如图 1所示:
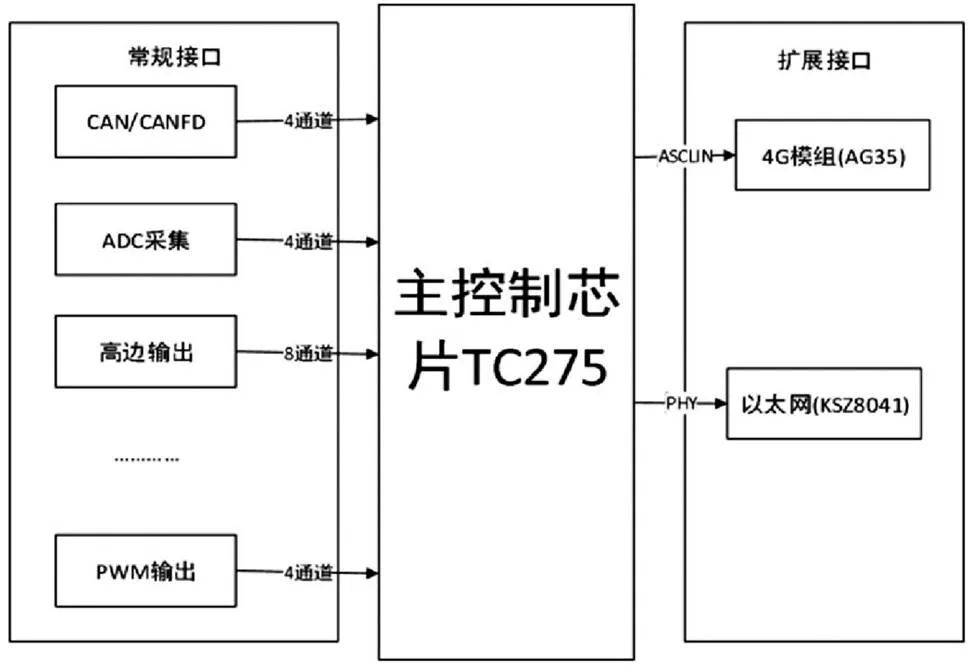
图1 系统功能框架图
下文将分别对控制器设计中的要点部分:CPU 选型、4G通信功能和以太网通信部分进行说明,其他常规接口部分不进行特殊说明。
1.2 CPU选型
选择英飞凌AURIX系列TC275作为整车控制器的主控芯片,TC275是一个三核微处理器,内核最高工作频率可达 200 MHz,拥有丰富的外设接口,如图2所示,具备传统VCU 控制板的CAN、CANFD、ASCLIN、高边驱动、低边驱动、ADC 数据采集、数字信号采集、PWM 输出等功能。
本方案中,所采用的TC275,具有多核调度、工作频率高、芯片处理能力强等优点。在继承传统接口的基础上,主要通过ASCLIN 扩展出4G通信模组AG35,实现与外界的互联互通。由于TC275芯片内部集成了MAC(Media Access Control),可通过外接 PHY(Physical Layer Interface)芯片扩展出Ethernet 功能,MAC与PHY之间通过RMII(Reduced Media Independent Interface)进行通信,实现数据的交互。
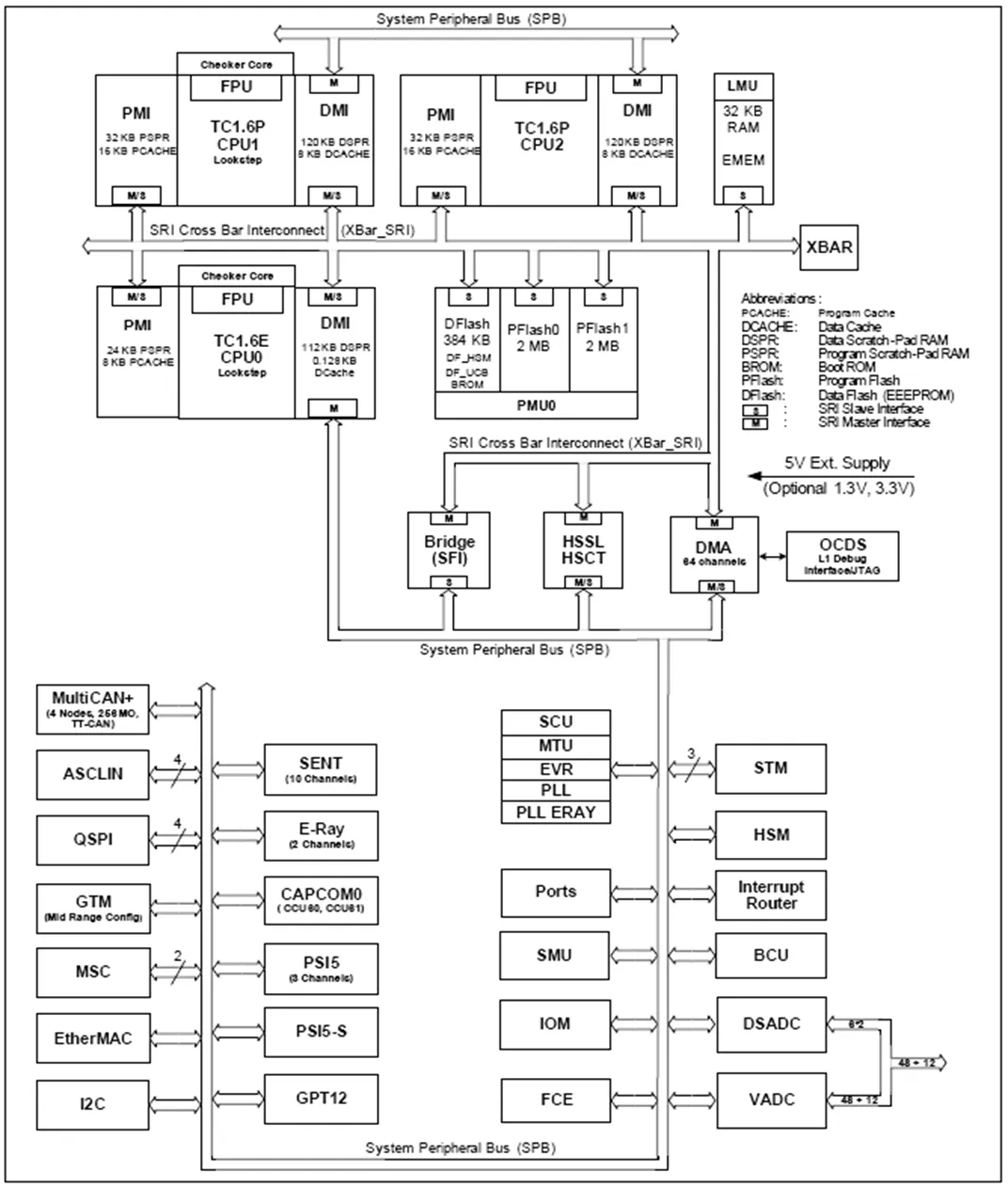
图2 TC275 模块框图
1.3 4G 通信功能
1.3.1功能划分
基于实际项目应用,4G通信模组的主要功能是完成与监控平台完成数据的交互,功能如下:
(1)将电动汽车的运行采集数据返回到平台上,实现平台对车辆信息记录,跟踪,做大数据分析,持续跟踪车辆的运行状态,对一些关键的部件(比如电池包,运行轨迹)的关键参数实施大数据统计分析,便于相关部门和企业更好地做出决断;
(2)通过对车辆的持续监控,当车辆发生异常时,发出警告信息,减少损失;
(3)实现对车辆信息的远程诊断,升级的功能;
(4)在紧急突然情况下,平台对车辆发出警告信息,比如电池温度过高等。
1.3.2硬件选型
4G通信模组选用移远通信生产的AG35 模组,这是一款车规级的 LTE 通信模块,最大下行速率150 Mbps和最大上行速率50 Mbps。同时,它内置了多星座高精度GNSS GPS/ GLONASS/BeiDou/Galileo/QZSS 接收机,在简化产品设计的同时,大大提升了定位精度与速度,可以满足功能开发需求。
1.3.3硬件电路实现
TC275与AG35模组之间主要是通过ASCLIN接口和一些IO接口,完成TC275与模组之间的控制和数据交互,设计的主要关键部分如下:
(1)电源。
由于射频部分在数据发送和接收时,消耗的电流比较大,峰值电流会达到 3 A,所以电源部分增加了储能电容和滤波电容,相应的增加 PCB 部分电源线走线的宽度,增加电源的供给,减少电源线波动,如图 3 所示:

图3 电源部分
(2)通信接口。
本设计中TC275与AG35的通信主要通过ASCLIN 实现,TC275的电平端的工作电压为5 V,AG35的接口电压为1.8 V,所以中间增加了电平转换芯片,如图4所示:
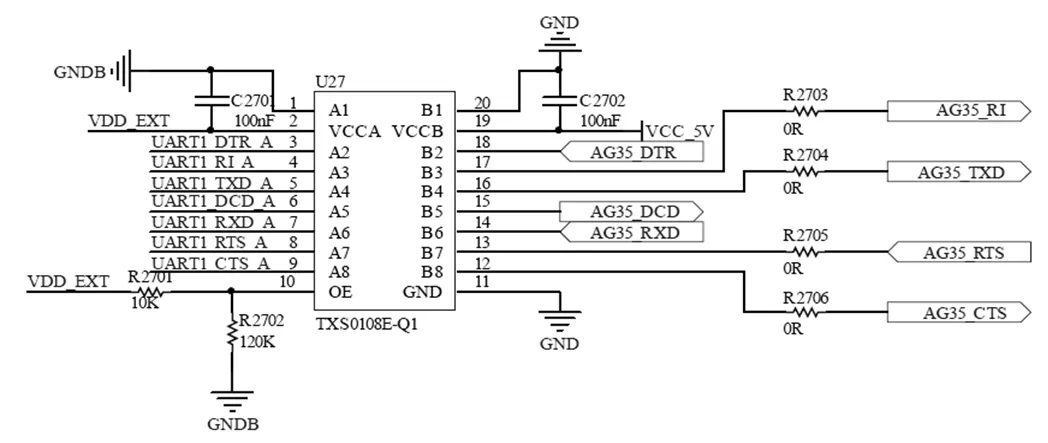
图4 电平转换
(3)天线。
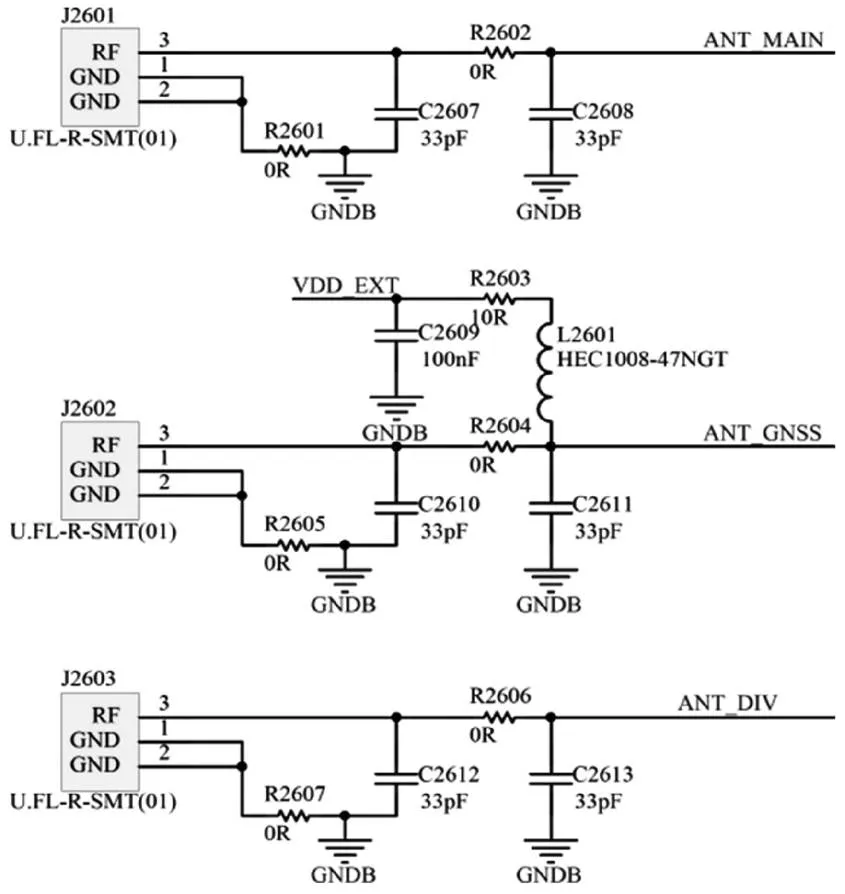
图5 天线电路
AG35 模组包括三个天线,主天线,分集天线和GNSS 天线,天线部分的要求是阻抗匹配为50 Ω,如图5所示。
以上部分主要对电源,通信,天线部分做了主要的说明,其他部分如SIM卡座接口电路,控制引脚以及状态指示部分没有做特殊的说明,这些共同构成了AG35与TC275之间的通信。
1.4 以太网通信的实现
1.4.1功能划分
车载以太网为系统的一个扩展功能,结合4G通信功能,在车辆的功能扩展部分占据主要的功能,主要实现以下功能:
(1)车载以太网作为自动驾驶功能的一部分,激光雷达和车载摄像头通过以太网传输给主控芯片,主控通过数据分析和判断对车辆的运行作出判断。
(2)车载以太网作为汽车域控制部分的一部分,可以通过以太网组建局域网,实现大数据流的交互,特别是车载信息娱乐系统开发,有较强的可扩展性。
1.4.2硬件选型
主控芯片TC275内部集成了MAC部分,所以只需要给外部接入PHY芯片就可以实现以太网同行,PHY芯片选择使用KSZ8041NLI芯片,该芯片支持10 M/100M自适应功能,支持MII(Media Independent Interface)/RMII(Re- duced Media Independent Interface)接口,可以满足系统要求。
1.4.3硬件电路实现
主控芯片TC275与PHY芯片KSZ8041NLI之间通过 RMII连接,输出部分由隔离变压器连接RJ45输出,下面主要分析几个特殊部分:
(1)RMII接口部分电路。
RMII接口部分电路主要包括信号线如表1所示,为了增加信号的抗干扰性,在进行PCB布线时,对特殊信号线进行着重处理。
表1 特殊信号处理
组号信号线名称注意事项 1MDC,MDIO信号线做等长处理 2TX_EN,TXD0,TXD1信号线做等长处理 3CSR_DV,RXD0,RXD1信号线做等长处理 4REFCLK注意对时钟线的保护
原理图部分如下图6所示。
(2)输出接口部分。
输出接口部分采用1:1的隔离变压器连接到RJ45座,如图7所示,在进行PCB布线时,特别处理了差分信号(TX_P,TX_N,RX_P,RX_N)线的阻抗,调整为100 Ω。另外,外壳的接地与PCB板的地信号进行了隔离。
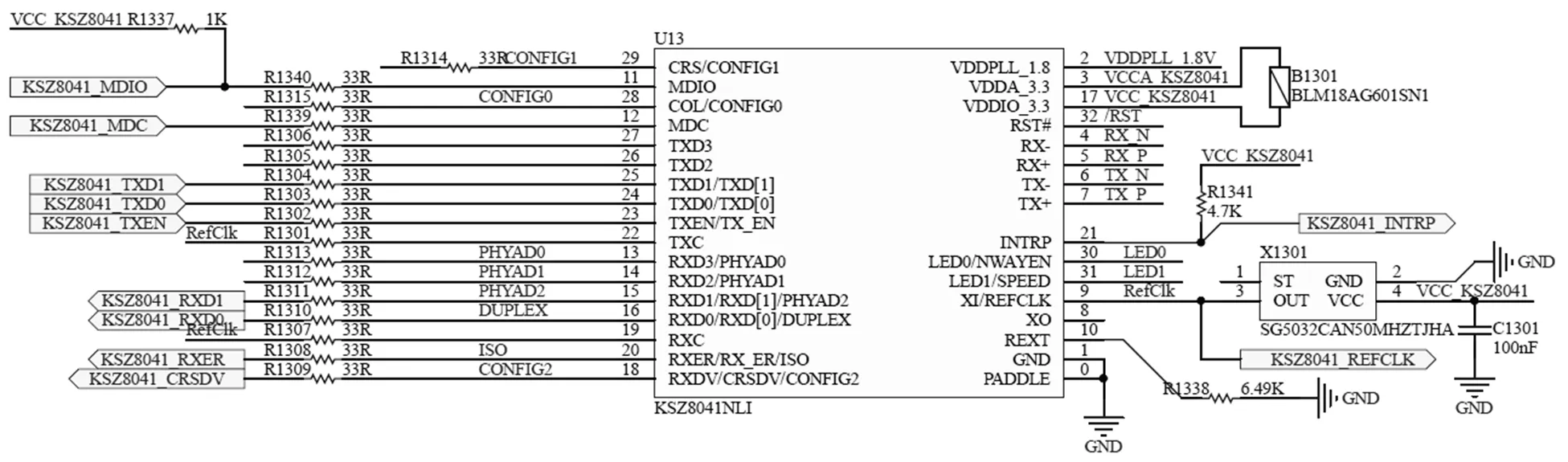
图6 外接phy芯片

图7 带隔离变压器的 RJ45 座
以上主要介绍了RMII接口,输出接口部分,外加电源部分,配置接口共同实现了以太网通信功能。
1.5 PCB 板的整体设计
成品PCB板如下图8所示。考虑到系统的稳定性,可靠性,以及PCB板的尺寸要求,本设计在实际的layout中,做了以下的处理。
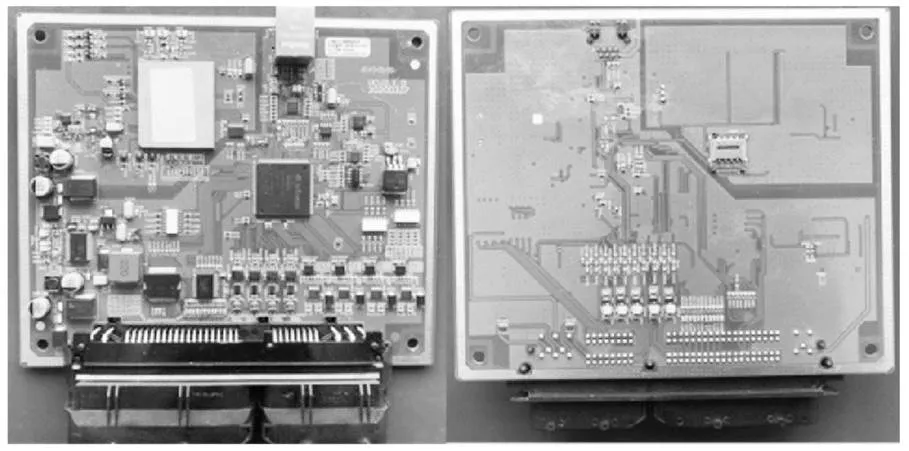
图8 成品PCB板
电路板选用了6层的板,分为顶层、地平面层、电源层,信号层,地平面及底层,增加PCB板的密度,减少PCB的尺寸,增加了电源层,参考层提高系统的稳定性和抗干扰性。
(1)在具体布线时,系统的模拟地和数字地分开布线,单点连接。
(2)干扰性,辐射性强的信号(天线,晶振)远离其他信号线。
(3)大功率器件的布局,远离灵敏信号线,尽量布局到 PCB 板的边缘位置。
2 软件验证
整车控制器的软件框架分为三个部分应用层,中间层和底层驱动部分。
(1)应用层是整车控制策略部分,基于MATLAB/ Simulink开发,经过编译生成C代码。
(2)中间层为应用层和底层驱动的接口部分,通过封装中间层代码部分为Simulink Library 来实现,由C代码实现。
(3)底层驱动MCAL(Microcontroller Abstraction Layer)部分由EBTresos Studio软件生成底层的C代码,符合 AUTOSAR(Automotive Open System Architecture)架构的接口部分。
整个系统的代码集成部分,在TASKING中进行集成、编译,生成目标hex文件下载到PCB板中进行调试。
在进行软件功能验证时,通过应用层通过接口层调用底层函数验证系统的功能,验证了4G通信功能和以太网通信功能,为策略层的实现提供接口函数。
2.1 4G功能的实现
4G通信功能实现主要通过《GB/T32960.3—2016》来验证。VCU 通过采集车辆的信息,然后发送到监控平台上。流程如图9所示。

图9 4G测试流程图
软件实现了开机自检,然后登录监控平台,将采集到的数据(车辆的状态、充电状态、运行模式、车速等)。通过报文将实时数据传送到监控平台。
软件部分的实现通过AT指令与AG35模组完成通信,实现数据的交互。图10为上报的数据及数据解析。

图10 平台数据解析
通过以上测试,可以看到 4G 模组已经可以正常运行。
2.2 以太网功能验证
以太网部分功能的验证主要通过PC机与硬件PCB板互联测试完成的。测试的流程图如图11所示。
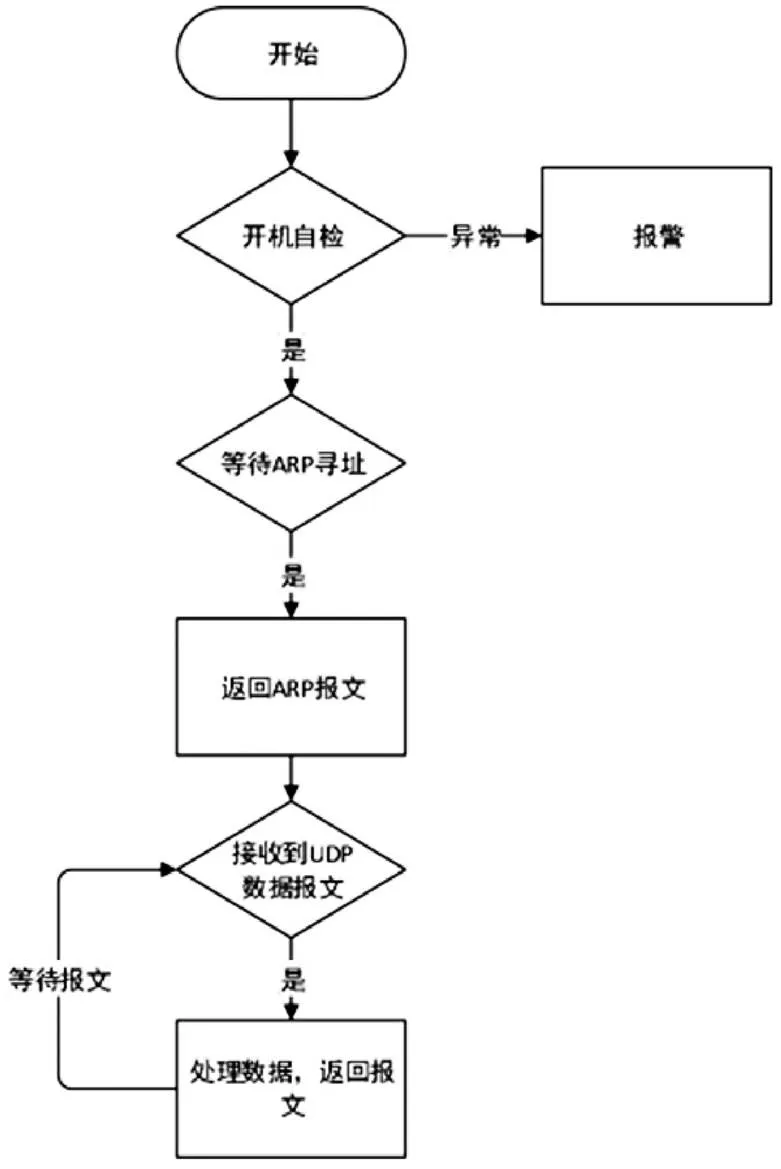
图11 网络测试流程图
软件在完成开机自检后,等待ARP(Address Resolution Protocol)寻址,返回ARP报文,然后等待PC端发送UDP(User Datagram Protocol)报文,当收到 PC 端的报文后,将接收的报文逆序后回传给PC。测试结果如图12所示。
通过以上测试验证了以太网模块可正常运行。

图12 网络测试报文
3 设计方案的优点和不足
本设计方案实现了整车控制器与外界的通信,实现了与外界的互联互通,为车辆的控制增加了新的功能接口。
3.1 本控制器方案的优点
3.1.1取代了TBOX方案
避免了后续二次组装过程中,增加对车辆的破坏,节省了后续的二次组装和调试,减少了生产加工的难度和危险系数。
3.1.2扩展了车辆与外界的交互能力
由于增加4G通信接口部分,可以实现远程对车辆的访问,可以实现远程监控,甚至危险必要情况下的远程操作。
3.1.3增加了数据的交互能力
通过以太网的接入,弥补了CAN线通信时的带宽问题,以太网部分可以实现100 M的数据交互,减少了CAN的负载率,为后续的车载娱乐,域控制交互提供了接口。
3.2 系统的不足
目前新的方案已经逐步成熟,处于原理开发到实践应用阶段,但存在以下不足:
3.2.1硬件需要进一步完善
硬件部分虽然可以正常运行和调试,但是对于系统的稳定性和可靠性还需要进一步的验证和调试,相关的EMC 测试部分也需要进一步验证。
3.2.2软件功能也需要改进
软件部分目前只是合并了原来车载VCU的基本控制方案和外部 TBOX的功能,其他的功能还需要进一步的拓展,实现与外界更好的互联互通,提供更多的应用场景,实现更多的功能。
4 结论
为了更好地实现分布式驱动电动车的控制和功能拓展,实现车辆与外界的交互,丰富车辆的功能,提升车辆驾驶过程的舒适度和可靠性。本方案提出了网联分布式驱动电动汽车整车控制器电路设计方案和应用场景,后期将专注于硬件功能的完善、场景算法的开发和测试工作。
[1] 周逢军.基于双层架构的分布式驱动电动汽车综合控制策略研究[D].北京:北京理工大学,2014.
[2] 周逢军,王庆辉.基于FP算法的电动汽车动力学协调控制[J].北京汽车,2015(4):4-7.
[3] 林程,周逢军,徐志峰,等.基于补偿自适应控制算法的车辆状态参数估计[J].农业机械学报,2014,45(11):1-8.
[4] 林程,徐志峰,周逢军,等.分布式驱动电动汽车稳定性分层控制策略研究[J].北京理工大学学报,2015,35(5):490-493.
[5] 陈山枝,胡金玲,时岩,等.LTE-V2X车联网技术、标准与应用[J].电信科学,2018,34(04):1-11.
[6] 李克强,戴一凡,李升波,等.智能网联汽车(ICV)技术的发展现状及趋势[J].汽车安全与节能学报,2017,8(01):1-14.
[7] 徐向阳,胡文浩,董红磊,等.自动驾驶汽车测试场景构建关键技术综述[J].汽车工程,2021,43(04):610-619.
The Hardware Circuit Design for the Vehicle Controller Unit of the Networked Distributed Drive Electric Vehicle
JING Feng1, ZHOU Fengjun2, HAN Bing1, SUN Shuaishuai2
( 1.Beijing Science of Technology Xinyuan Information Technology Co., Ltd., Beijing 100081;2.Institute of Frontier Technology of Beijing University of Technology, Shandong Jinan 250357 )
When designing a networked distributed drive electric vehicle controller, it is necessary to take into account both the networked functions and the distributed drive control functions at the same time, which has a certain degree of complexity. This paper proposes a hardware circuit design scheme, which expands the functions of 4G communication and Ethernet communication for distributed driving new energy electric vehicles, increases the interaction between the vehicle and the outside world, and realizes the remote monitoring of the vehicle. The solution can provide a technical support for the implementation of the remote control, intelligence, multimedia, realization and interconnection with the outside world of the subsequent development of the vehicle.
4G communication; Ethernet communication; Distributed drive electric vehicle
10.16638/j.cnki.1671-7988.2021.021.002
U495; U469.7
B
1671-7988(2021)21-07-06
U495;U469.7
B
1671-7988(2021)21-07-06
景峰(1986—),男,本科,工程师,就职于北京理工新源信息科技有限公司,研究方向:分布式驱动电控技术、车联网关键技术。
