基于UKF的实时数据融合处理方法
2021-11-25崔乐园李五星
崔乐园 李五星



摘要:为充分利用靶场测量资源,延长测量弧段并提高测量精度,本文采用基于当前统计(CS)模型的UKF滤波实现对多种测量设备的测量元素进行融合解算处理,提高测元利用率和参数估计精度,降低数据冗余。
关键词:数据融合;UKF;CS模型
Abstract: In order to make full use of the measuring resources of the shooting range,extend the measuring arc segment and improve the measuring accuracy, this paper adopts current statistical model to realize the real-time fusion of various measuring elements and improve the utilization rate of measurement elements and the accuracy of parameter estimation, and reduce data redundancy.
Keywords:The Real-Time Fusion;UKF;Current Statistical Model
引言
在靶场测控系统中,实时测量数据的融合处理与靶场测控体制和试验任务密切相关。目前,靶场多种测量设备并存,覆盖目标不同飞行段落,测量元素存在冗余和互补。为充分利用测量资源,延长测量弧段并提高精度,需要根据测量设备精度高低,对不同的设备进行合理的部署,并对不同设备的测元进行优先级设置,制定综合有效的实时融合策略。
测量元素
为了确定目标的飞行参数 ,外测测量需要以若干测量元素构成一种测量体制。目前,根据测量元素的类型区分,靶场测控常用的外测体制有: (距离、方位角、俯仰角)体制, (距离及其变化率)体制, (距离和及其变化率)体制, (距离差及其变化率)体制、 (距离和变化率)体制等,对应测量元素(以下简称“测元”)有距离 、距离变化率 、方位角 、俯仰角 、距离和 及其变化率 、距离差 及其变化率 等测元。
如图1所示,在地心直角坐标系下 时刻目标 的位置为 ,速度 为 ,主站 的位置为 ,副站 的位置为 。
2.1 距离 及其变化率 、距离和 及其变化率 、距离差 及其变化率
距离测元是用来表示目标与测量设备的径向距离 ,通过精确测量电磁波在测距设备与被测目标之间往返所需的时间来测定。而距离和 /差 为目标分别到两个测量设备的径向距离之和/差。
如图1所示, 时刻主站 到 的径向距离为 ,副站 到 的径向距离为 ,主站 到目标与目标到副站 的距离和/差为 /。
实时融合处理采用基于CS模型的UKF滤波方法,根据实时可用测元进行自适应解算,保证目标轨迹解算区间最大化,实现测量元素的充分利用。
5.1 实时处理流程
实时处理流程包括对各种测元信息的预处理[3]、测元选择策略和UKF滤波解算。如图2所示,原始数据经过预处理、测元选择策略筛选生成测元矩阵之后,进行实时融合算法处理,得到目标运动参数的估计值。
5.2 测元选择策略
根据靶场实际应用,常用的测量设备有光学测量、脉冲雷达、相控阵雷达、连续波测速等。其中,光学设备通过角度交会实现目标参数的确定,受天气、光线和布站几何条件的影响比较大,有效作用距离较短,一般部署在首区;脉冲雷达及相控阵雷达发射功率大,作用距离远,同时可以实现多目标的测量,但是测量精度相对较低。连续波测速雷达设备构成相对简单,误差源少,测量精度高,多用于合作目标测量,且作用距离较短,需要多站联合测量。因此,为充分利用靶场测量资源,延长测量弧段并提高测量精度,需要根据不同的任务需求,对不同的测量设备进行合理的部署,制定综合有效的实时融合策略。
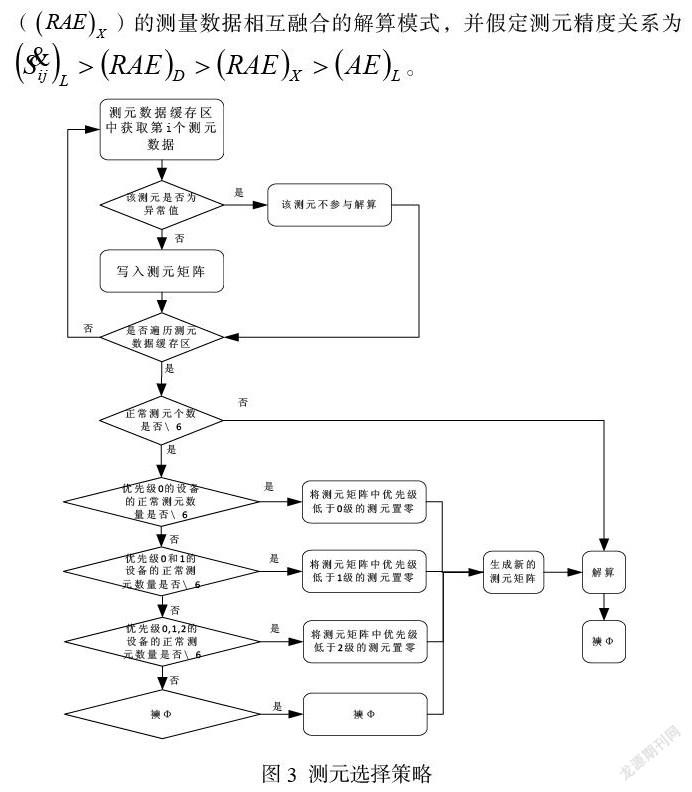
本文主要分析连续波测量雷达(距离和变化率 、方位俯仰角 ),单脉冲雷达(径向距离、方位俯仰角 ),相控阵雷达( )的测量数据相互融合的解算模式,并假定测元精度关系为 。
解算命令触发后,在数据缓存区查找当前时刻可用测元,判断是否为异常值,如果是则不参与解算,如果不是异常值,则写入测元矩阵,直至遍历数据缓存区;判断测元矩阵中的测元个数,如果测元个数小于6个,则测元矩阵直接参与解算;否则从最高优先级的测元开始由高到低对测元个数进行判断,如果当前优先级及之前的测元数量大于等于6个,则将低于该优先级的测元数据置零,否则继续遍历优先级较低的测元数据,直到有效测元个数大于等于6个为止。
5.3 结果比对分析
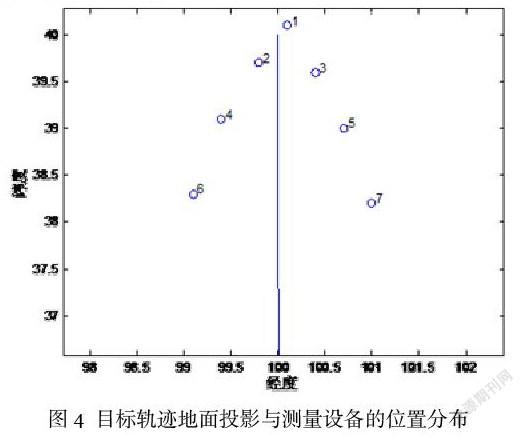
模拟7个测量设备对180°射向的运动目标进行融合解算,7个测量设备以及目标地面轨迹投影的分布如图4所示。其中,1~4号为连续波测量设备,1号和2号为主站,3号、4号和7号为副站,5号为单脉冲测量设备,6号为相控阵测量设备。
利用MATLAB仿真工具模拟原始数据,测速测元的随机差为0.02m/s,系统差0.0045m/s;测距测元的随机差为7m,系统差为5m;测角随机差和系统差均为0.0115°。模拟发送软件实现测量数据的实时发送,实时数据处理软件对数据进行接收和融合解算,并显示目标轨迹。
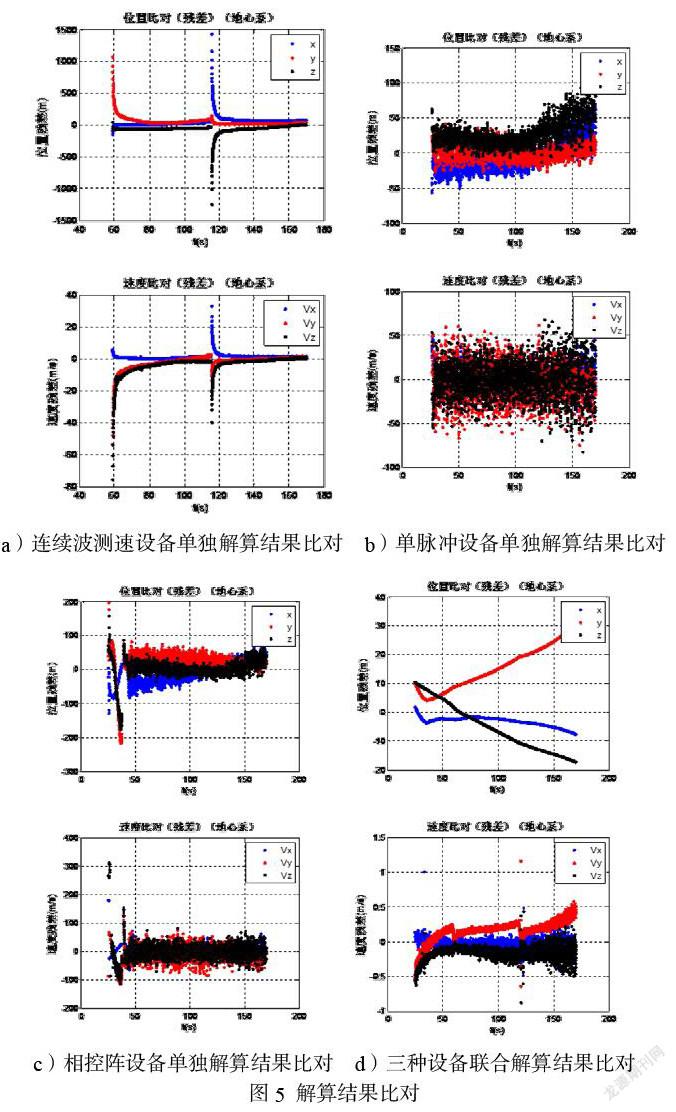
以上述模拟条件分别模拟连续波、单脉冲和相控阵单独进行解算以及三种设备联合解算的结果,并分别将实时处理软件的解算结果与理论轨迹进行比对,目标运动参数的比对残差如图5所示,统计比对残差的均方根误差如表1所示。
连续波测速设备相较于其他设备从60s才输出有效目标轨迹参数,60s之前因为7号站位置较远,俯仰角低于保精度最低俯仰角限制导致数据无效,连续波设备没有足够的有效测元构成独立解算条件。当达到独立解算条件并且稳定后,在局部段落也能获得较高的的位置和速度精度。
单脉冲和相控阵設备则都是在25s开始输出有效运动参数,并且位置精度相对较高,但因为没有有效高精度的测速信息,所以解算的速度精度相比多测速解算结果较差;由于相控阵设备的测量精度低于单脉冲设备,所以相控阵单独解算的位置和速度结果也相比较差。
三种设备融合解算,能够从25s开始输出较好的解算轨迹。在解算初始阶段连续波设备不满足独立解算时,联合其他两种设备的测元进行融合解算,有效延长测量弧段,获取解算全程的高精度测量结果。
结论
随着靶场测控系统的不断壮大,外测设备数据也会越来越多,对应的测量数据也就越来越丰富,后续可以进一步实现实时统计测元精度,在线实现高精度测元选择,实现目标运动参数的高精度估计,同时提高设备利用率,减少数据冗余,达到降本增效的目的。
参考文献:
[1] 周宏仁,敬忠良,王培德.机动目标跟踪[M].北京:国防工业出版社,1991年.
[2] Julier S J,Uhlmann J K. Unscented filtering and nonlinear estimation[J]. Proceedings of the IEEE,2004,92(3):401-422.
[3] 刘利生.外测数据事后处理[M].北京:国防工业出版社,2000年.
