基于MATLAB的配网带电作业机器人运动学和作业路径仿真分析
2021-11-25孙霄伟任书楠徐善军杜婧路菲张黎明胡益菲
孙霄伟,任书楠,徐善军,杜婧,路菲,张黎明,胡益菲
(1.北京国电富通科技发展有限责任公司,北京 100070;2.国网电力科学研究院有限公司,南京 211106;3.国网天津市电力公司,天津 300010)
0引言
随着人工智能技术的发展,配网线路带电作业逐步使用机器人替代工人完成危险的作业任务。应用机器人可以有效降低作业风险、保护作业人员,对于保障电网运行安全具有重要意义。现阶段配网带电作业机器人分为全自主和人机协同两种方式。其中,全自主方式是用绝缘斗臂车将机器人送至配网线路附近,由机器人独立完成全部作业任务,作业人员在地面监督并遥控解决问题。
人机协同是用绝缘斗臂车将机器人和作业工人一同送至配网线路附近,由机器人完成较危险的直接接触带电线路的动作,作业工人协助完成危险性较低的动作,如图1所示。对于带电作业这种危险性很高的作业任务,全自主一定是未来发展的方向,但鉴于配网线路作业环境复杂和现阶段技术水平的局限,人机协同对于这种复杂的作业任务适应性更好,具有相对更广泛的应用前景。选择人机协同的作业方式,作业人员和机器人共处在一个有限的空间,对机器人本身灵活性、安全性和作业路径的规划水平相比全自主方式要求更高。本文主要从人机协同方式的带电作业机器人入手,通过仿真分析为规避作业风险和提高作业效率提供理论依据。

图1 人机协同机器人图
1 背景
配网线路复杂、危险的作业环境要求机器人在有限的空间内既能够快速将末端工具送至指定的作业位置,又要灵活避开周围分布的高压线路和旁边配合工作的作业工人。根据这些要求,选择UR10作为配网带电作业机器人的作业主体。UR10是一款工业中广泛应用的六轴关节型电动操作臂,虽然其末端承载力只有98 N,但它能够实现6个关节360°旋转,相比普通的六轴机器人更加灵活高效,非常适合这种空间有限、需要人机紧密配合的作业任务。但这种机器人负载较小、关节容易保护,为了保证作业流程顺畅,有必要对机器人的关键作业动作进行仿真分析。
对于工业机器人而言,位姿数据和路径规划问题都是影响机器人作业效果的重要问题,这些问题最终都会转化成数学算法由机器人内部计算机完成,并由内部计算机控制各个关节转动实现。工业机器人的仿真分析就是利用计算机软件构建机器人的简化数学模型,借助数学计算,模拟机器人的动作过程,分析可能影响作业过程和效果的重要问题。
本文使用MATLAB机器人工具箱为机器人建立数学模型,以配网带电作业过程中几个关键路点为例,对这些作业动作进行仿真分析,及时发现问题、规避风险,保证机器人能够安全高效地完成作业任务。
2 机器人数学模型的建立
UR10机器人数学模型的采用标准D-H坐标变换建模方法。根据建立的简化模型,通过齐次矩阵计算各个连杆的位置姿态。
标准D-H坐标变换法对UR10机器人连杆参数定义如下:从基座至末端的连杆编号从1#~6#,zi配置在关节i的轴线上,xi位于zi-1和zi的公垂线上;连杆长度ai-1为沿xi轴从zi-1移动到zi的距离;连杆扭转角αi-1为绕xi轴从zi-1旋转到zi的角度;连杆偏移di为沿zi轴从xi-1移动到xi的距离;关节角θi为绕zi轴从xi-1旋转到xi的角度。
根据UR10机器人各连杆间的平移和转动变换关系,可以得出UR10机器人模型如图2所示。并且列出它标准D-H坐标系参数表,如表1所示。

表1 UR10标准D-H坐标系参数表

图2 UR10机器人坐标系变换图
3 机器人运动学计算
由于机器人的结构尺寸是已知的,只要已知各个关节转动的角度,可以计算出机器人末端的最终位置和姿态。这个计算过程就是运动学正解。反之,已知末端最终位置和姿态,也可以推导出机器人的各关节角度值,这个计算过程就是运动学逆解。计算正解和逆解是用来确定机器人末端到达位置的基础问题。
3.1 运动学正解
运动学正解求解是已知机器人各个关节角q,求机器人末端坐标系相对于基座坐标系的位姿矩阵T。对于UR10这样的六轴机器人,位姿矩阵是一个4×4齐次矩阵。将上文写出的UR10标准D-H坐标系参数θi、di、ai、αi,分别代入计算公式可以计算UR10机器人相邻连杆间的齐次变换矩阵Ti-1和Ti。

UR10机器人的姿态角在示教器上可以用旋转向量和RPY角两种方式显示出来。本文用旋转矩阵转换为RPY角公式进行计算验证。RPY角可以看作机器人末端坐标系围绕基坐标系旋转而成,其中x6绕x0轴旋转Rx,y6绕y0轴旋转Ry,z6绕z0轴旋转Rz。
RPY角计算公式如下:

3.2 运动学逆解
运动学逆解求解是已知机器人的位姿矩阵T,求关节角q=[θ1θ2θ3θ4θ5θ6]。运动学正解求解是唯一且相对容易,运动学逆解求解往往有多解且更为复杂。但运动学逆解求解对于找出奇异点和路径规划有重要意义。这里采用解析法进行计算。
根据正运动求解式(9)变换行列式如下:

根据行列式相等的性质计算θ3、θ2、θ4。
3.2.4 计算θ3
根据上文计算出的结果,假设:

3.3 实验验证
通过VNC与机器人系统通信, 读取系统内部有关机器人末端执行器的x、y、z值与关节角度信息,可以验证上文建立的模型和计算公式的正确性。
首先,选取机器人举起作业工具至作业点过程的3个路点为例。从示教器上读取它们的关节角数据θ1~θ6,将其转换为弧度值后,改写为关节角矩阵,然后输入UR10的标准D-H坐标系参数,用MATLAB机器人工具箱中的SerialLink命令构建UR10的数学模型,用fkine命令计算模型的末端坐标系的位姿矩阵T。
求得路点1位姿矩阵:


上述计算结果与机器人系统显示数据,如图3所示基本吻合,可以确认所建立机器人模型、各个建模参数和计算公式的正确性。为进一步引导机器人到达目标位置提供了理论基础。

图3 机器人关节角和路点参数
4 激光雷达定位
配网带电作业机器人的作业目标位置和作业姿态等关键信息是由激光雷达根据作业现场环境确定。这种方法可以在作业过程中实时探知作业区域的空间三维环境,并获取高压线路的空间位置坐标。相比于视觉定位技术,激光雷达定位效率更高,结果更准确,受环境影响更小,能够快速、准确地完成目标位置计算,为机械臂的运动规划提供有力数据支撑。
人机协同配网带电作业机器人采用一台固定在转台上的SICK TIM561单线激光雷达扫描定位。该激光雷达可在270°扇面范围内输出激光脉冲测量点的距离和对应角度值,同时激光雷达会围绕转台固定轴线反复旋转,用不同的视角对配网线路进行反复扫描测量,通过计算雷达、机器人和末端工具各坐标系之间的旋转矩阵,可以掌握各坐标系之间的变换关系,将激光雷达所有的扫描数据统一在固定的公共坐标系下,最终形成空间点云图,如图4所示,用来引导机械臂准确到达线路下方指定的位置完成作业任务。

图4 激光雷达点云图
5 路径规划
机器人的路径规划是根据作业任务要求和激光雷达传回的目标位置,确定机器人的操作顺序和动作过程,来实现机器人各关节转动角度、角速度和角加速度的连续光滑运动,提高机器人运动轨迹的精度和运动状态的稳定性,避免由于速度突变造成机器人关节的磨损和振动冲击。路径规划对于提高机器人作业质量、工作效率和延长机器人使用寿命都有重要的意义。
本文以取出工具到作业位置的路径为例,使用MATLAB机器人工具箱中的jtraj函数生成两段连续的作业路径。通过此函数同时可以计算出该段路径上6个关节的角度值如图5所示,角速度值如图6所示,角加速度值如图7所示。
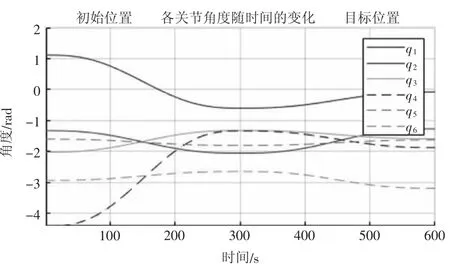
图5 机器人各关节角度的变化曲线

图6 机器人各关节角速度的变化曲线
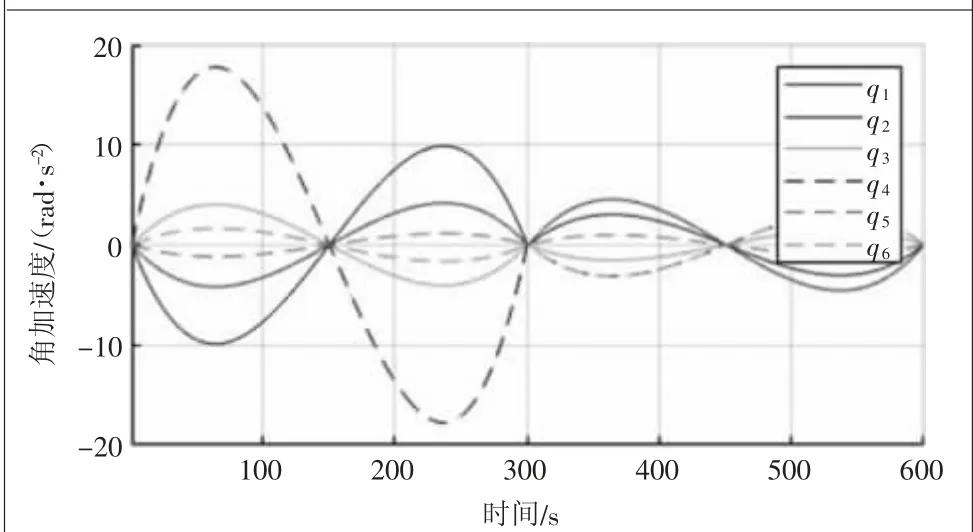
图7 机器人各关节角加速度的变化曲线
通过fkine函数,用得出的关节角度值可以进一步计算出机器人末端坐标系在空间位置变化曲线。通过jacob0函数可以进一步计算出机械臂末端坐标系位置变化如图8所示,线速度值如图9所示,角速度值如图10所示。

图8 机器人末端坐标系的位置变化曲线

图9 机器人末端坐标系的线速度变化曲线

图10 机器人末端坐标系的角速度的变化曲线
通过曲线可以进一步分析所设路点设置是否合理。通过图示曲线可以看出从起始路点到目标位置:q1关节转动最大角度1.6172 rad;q4关节转动最小角度-4.4155 rad;q4关节转动最大角速度5.7709 rad/s;q6关节转动最小角速度-4.8642 rad/s;q4关节最大角加速度17.7701 rad/s2;q4关节最小角加速度-17.7701 rad/s2。
从上述几个图表可以看出,机器人末端到作业位置的整段路径,机器人末端的运动轨迹和机器人关节角度变化曲线较为平滑,末端坐标系的速度和角速度随时间的变化比较平滑,其中关节4的相对瞬时速度和加速度较大,对机械臂的关节冲击较大。
6 工程应用验证
通过操作配网带电作业机器人在实验室的模拟线路运行整个作业流程来验证仿真结果和实际作业效果,如图11所示。配网带电作业机器人从取剥线工具开始,然后携带剥线工具到达作业准备位置,然后激光雷达扫描上方模拟线路,根据激光雷达提供的数据,机器人到达作业位置完成剥线任务,然后将剥线工具放回工具架,再在另一个工具架上取下接线工具,在刚才剥线相同位置完成接线任务,整个作业过程动作流畅,没有因关节速度和加速度变化发生关节保护,因此可以判定,规划的作业路径可以满足实际作业的需要。

图11 机器人模拟线路作业
完成实验室的验证之后,在选定的10 kV配网实际线路,有专业作业人员操作斗臂车配合下,完成完整的剥线、接线全流程作业,进一步验证配网带电作业机器人在实际工作环境的作业效果。经过1 a多的数百次试点作业,配网带电作业机器人可以顺利完成全流程作业项目,整个机器人系统运行流畅可以满足要求。
7 结语
本文通过MATLAB机器人工具箱建立UR10机器人的数学模型。通过数学计算对机器人进行带电作业的关键路点进行正逆运动学分析,在运动学计算的基础上进一步进行作业路径规划,通过对实验室模拟环境对该分析方法进行确认,并最终在实际线路完成了该项作业任务。
实践证明,仿真分析对于使用机器人完成这种特殊作业任务具有重要的意义:1)使用仿真软件为此类从事此类高风险、环境复杂作业任务的机器人建立数学模型,通过模型分析作业路径,有助于及时发现作业路径设置的问题,避免不合理的路点造成机器人关节磨损,影响设备使用寿命;2)通过仿真分析可以找到能够完成作业任务的合理位置和最佳路径,保证整体作业过程流畅高效;3)通过对机械臂模型的深入研究,有助于利用机器人替代更多人工操作,进一步降低作业人员作业风险和劳动强度。
