基于数字传感芯片的温度脉动仪
2021-11-25于龙昆戴鸿辉
于龙昆,何 冰,沈 红,戴鸿辉
(1.南昌大学 信息工程学院,南昌330031;2.九江学院 理学院,九江332005)
光在大气介质中传播,除了会受到空气中尘埃的散射作用,也会受到大气光学湍流的影响,引发光线的漂移和展宽、闪烁、光束强度的起伏等[1]。正因如此,测定大气湍流光学折射率结构常数是在光学应用领域必须解决的问题。对于湍流问题,Taylor等人首先建立了半湍流理论,随后前苏联学者Kolmogorov 提出了局地均匀各向同性湍流理论,认为在大雷诺数下,不同的尺度的湍涡在级串过程中,小尺度湍流最终会达到统计平衡状态,形成局部各向同性湍流,其后Obukhov 和Tatarskii 等人把他的理论应用到大气中波的传播问题,提出在湍流惯性区用大气折射率结构常数来定量描述大气光学湍流的强度。
在激光大气传输中,对大气湍流的描述一般包括大气折射率结构常数大气湍流的内尺度和外尺度,其中是衡量大气湍流强度的重要参数。大气湍流是由于大气的随机运动,造成了气团小尺度的折射率起伏,使得大气折射率和温度发生了随机变化。在讨论光波传播中的大气湍流效应时,一般考虑的是小尺度湍流运动,在小尺度湍流中,通常是认为满足局地均匀各向同性理论条件,在光波波段,折射率起伏主要受温度起伏的影响,湿度的影响不大,一般通过测量双点温度的脉动变化得到大气湍流的起伏变化[2-3]。
国内有多个机构研究和设计温度脉动仪,文献[4]介绍的钨铼丝温度脉动仪,其采用钨铼丝探头作为传感器,具有响应快、输出线性、工作稳定和不受外界环境影响的特点;文献[5]中研制的嵌入式温度脉动仪,避免了计算机只得位于温度脉动传感器的附近和工作于野外,由此引发对铂丝探头测量准确度的干扰缺陷;文献[6]提出了一种基于美国Campbell 公司生产的CR5000 数据采集系统的温度仪,可以同时采集5 个温度脉动仪的模拟信号。
金属温度脉动仪测量的是微弱模拟信号,对后续信号检测电路的设计及抗干扰能力要求较高。本文使用的数字气压温度传感器,具有压力和温度测量功能,同时让数字式温度脉动仪和铂丝温度脉动仪测量近地面大气折射率结构常数,并对两种结果进行了对比分析。
1 测量原理
在Kolmogorov 局部均匀各向同性湍流的假定下,折射率结构常数在湍流惯性区内满足距离的2/3 定律:

式中:n 为空气折射率;x 为湍流场内一点;〈…〉表示系统平均,在实际测量中,一般只能得到时间的平均结果。
2/3 定律认为,在湍流的惯性区间内,温度结构常数只与两点的距离的2/3 次方有关,与两点的位置和相对方向无关[10],惯性区的温度结构常数满足:
式中:T 和P 分别为气温(K)和气压(hPa)。通过测量一段时间内两个已知距离(一般选取50 cm~100 cm)测量点的温度起伏变化,就可以求出温度结构常数,从而求出大气折射率结构常数。
铂丝温度脉动仪由极细铂丝、 不平衡电桥、小信号前置放大器、电压放大器、电源等部分组成。通过两端铂丝去感应大气惯性区内空间两点温度的起伏变化,当空间内两点温度发生ΔT 变化时,金属丝的电阻呈线性变化,即

式中:α 为铂丝温度电阻系数。电阻值的变化,经不平衡电桥会转化为电压ΔV 的变化,从而将物理量温度差转换成电信号电压差,即

式中:A 为标定系数,可由与微温探头阻值相近的系数很小的固定电阻得到。
数字式温度脉动仪将两个数字气压传感器作为感温材料,设探测两点处的数字传感芯片探测的温度为T1,T2,探测两点的真实温度为T10,T20,传感芯片探测误差为T1e,T2e,则有

设两传感芯片的偏差为ΔT0=T1e-T2e,实际标定的固定偏差为ΔT,温度结构函数为两个真实温度的差平方的均值:

这种通过减去标定的固定偏差得出温度结构函数的方法称之为直接法。显然,该方法的精度与固定偏差标定的准确度有关,当ΔT=ΔT0时,该方法无误差,当ΔT 与ΔT0相差较大时,会引入大的误差。要标定好偏差,必须在一个恒温的环境下测量,但是目前保持恒温的条件达不到要求,因为当标定的偏差达到0.01 ℃时,根据换算,折射率结构常数达到10-16/m-2/3,所以直接标定固定偏差是行不通的。
因此提出了用扰动法计算温度结构函数。扰动法是利用两点实测温度的扰动相减来得出温度结构函数,即真实的温度结构函数为
根据大气湍流局地均匀假设,有

由于数字传感芯片的温度分辨力达到0.002 ℃,其所测量的温度的扰动差与真实温度的扰动差的差异很小,则测量的扰动近似等于真实温度的扰动,即

故扰动法得出的温度结构函数为

虽然数字传感器的测温精度不高,但是分辨力达到了要求,那么扰动测量的灵敏度也达到要求,因此可以利用两点探测的温度的扰动差来替代两点的温差,从而降低传感器的测量误差影响。
2 实验
实验仪器由安徽光机所提供的铂丝温度脉动仪和搭建的数字式温度脉动仪,PC 机和2 m 长的支架组成,实验使用的数字芯片模块型号为GY-BMP 280,由压力感测元件、湿度感测元件和温度感测元件组成,主控芯片是Arduino UNO,信号通过放大器,进行A/D 转换,将模拟值转换为数字电压,并且将电压送入逻辑电路中与后续电路对接。实验装置置于空气流通顺利,周围没有大的建筑物之处,在距离地面5 m 高的水泥面上放置支架,在离水泥面1.5 m 的支架上放置数字芯片温度脉动仪,与铂丝温度脉动仪捆绑在一起,放置在同一水平高度上,系统结构如图1 所示。实验在天气良好,实验环境地面下垫物为水泥路的条件下进行。
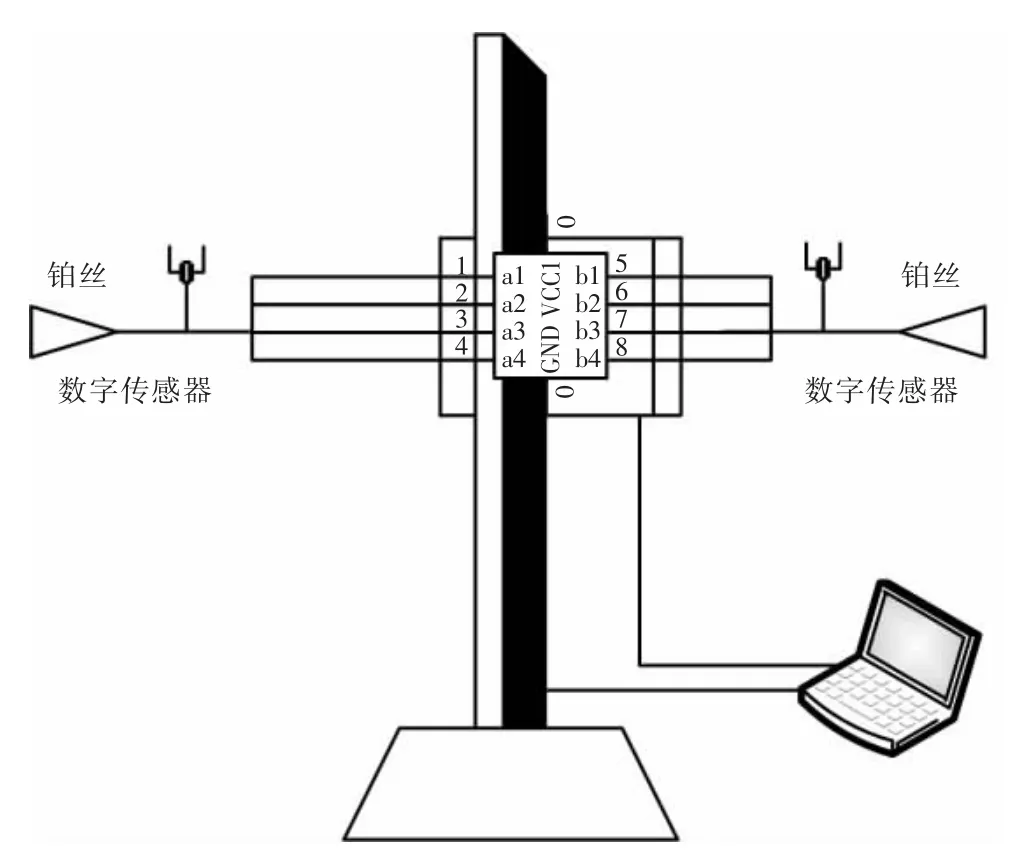
图1 系统结构框图Fig.1 Diagram of system structure
实验前将两端数字式温度脉动仪芯片间距调为55 cm,连续测量一天以上,观察大气湍流日变化情况。在用温度脉动仪测量折射率结构常数时,由于各种干扰或者仪器本身的不正常状态,会导致实验数据错误,因此,需要对测量得到的实验数据先进行筛选,先去除坏点后再取3 min 平均。如图2 所示,对数字式温度脉动仪与铂丝温度脉动仪测量的进行了对比分析,图中CDTP 是数字式温度脉动仪的测量数据,图中PTP 表示铂丝温度脉动仪的测量数据。通过对比图可以看出数字式温度脉动仪测量的日变化曲线与铂丝温度脉动仪的曲线能够较好的吻合,扰动法测量的原始数据跨越4 个量级(10-16~10-13/m-2/3),说明数字式温度脉动仪的灵敏度高,铂丝温度脉动仪的结果在3 个量级范围内变化(10-15~10-13/m-2/3),起伏一致,日出日落转换时刻也比较吻合,用数字式温度脉动法能较好的反映出大气折射率结构常数的日变化规律。
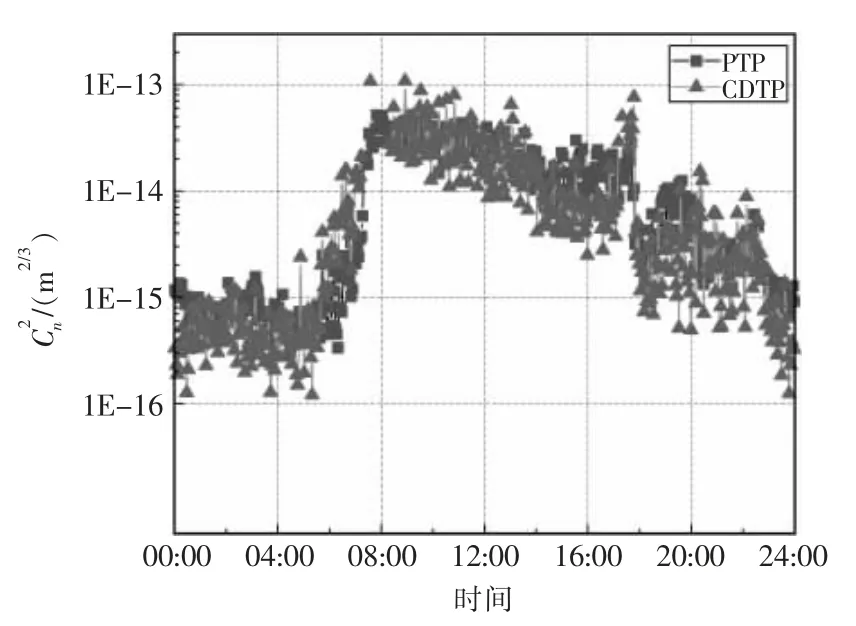
图2 校正后数字式温度脉动仪与铂丝温度脉动仪测量对比Fig.2 Contrast curve of measured by digital temperature pulsation meter and platinum wire temperature pulsation meter
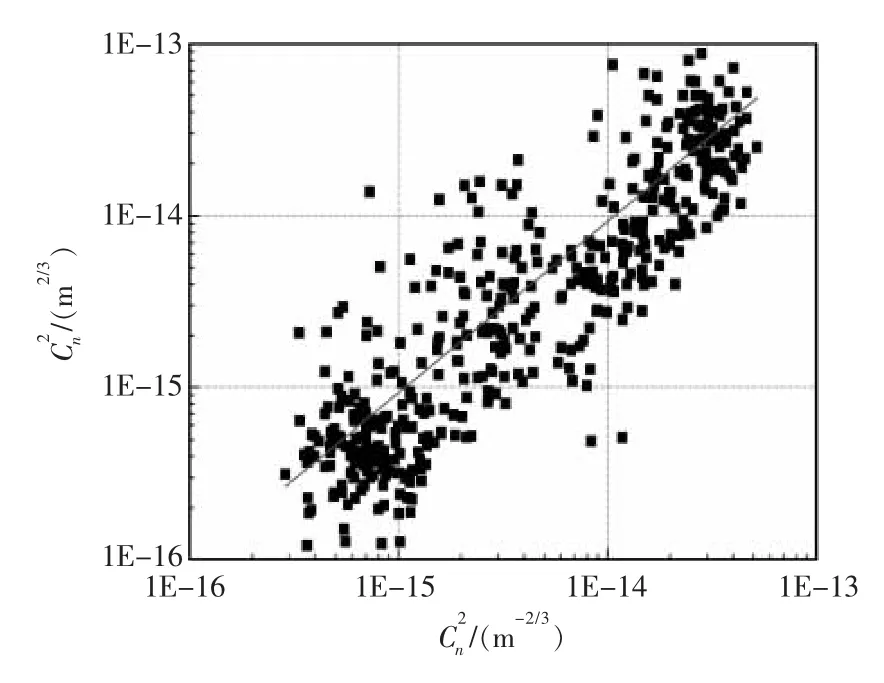
图3 两种方法测量值的对比Fig.3 Comparison of measured values of two methods
3 结语
本文利用了同步进行的数字式温度脉动仪和铂丝温度脉动仪,对比分析了数字温度脉动仪和铂丝温度脉动仪的测量结果,结果表明,数字式温度脉动仪得到的大气折射率结构常数和铂丝温度脉动仪测量结果有良好的一致性,能较好地反映出一天的日变化规律。本文提出的两种数字式温度结构函数测量方法,直接法标定传感器的固有误差,误差太大,会影响值的变化,在标定芯片固定偏差的同时,还要考虑到固有偏差可能随时间、温度的变化而发生改变;扰动法得到的与常用的铂丝温度脉动仪测量结果吻合较好,可以比较准确的求出近地面的折射率结构常数。因此,数字式温度脉动仪可以为激光大气传输的研究与应用提供基础,可以做为测量大气折射率结构常数的一种工具。