谷物联合收获机在线测产技术研究现状与进展
2021-11-25郁志宏张文杰杨丽芳张泽鑫敖日格乐
王 帅,郁志宏,张文杰,杨丽芳,张泽鑫,敖日格乐
(内蒙古农业大学机电工程学院,呼和浩特 010018)
0 引 言
精准农业是基于现代信息技术、生物技术、工程技术等一系列高新技术最新成就发展起来的一种重要的现代农业生产形式,其本质是基于农田作物生长环境和产量差异性的变量管理理念,实现利用最少的资源消耗获取最大的经济效益[1-2]。在农作物种植生产管理过程中,以在线、实时、有效的方法获取农田作物产量分布信息是实施精准农业的主要起点[3-4],是完善精准农业生产管理体系、推广智慧农业的首要任务。
传统的粮食作物产量获取方法是通过人工抽样估产或直接装袋称量,这类方法用于大面积种植的农田,劳动强度大、效率低,且只能得到地块的平均产量[1],不满足精准农业的实施前提;也有采用建立生长条件模型或运用遥感技术估测产量[5-6],但存在模型所需参数数量多且获取难度大、推广到其他区域或作物具有一定的局限性等问题[7]。为实现农作物产量在线实时测量,推进精准农业进程,同时伴随着农业机械化、传感器智能化和物联网技术的发展与应用,农作物产量在线监测技术已逐渐发展为精准农业生产管理体系的关键技术手段。农作物在线测产技术通过安装于联合收获机的测产传感器、水分传感器、定位装置等,实现农田粮食产量分布信息的在线实时获取,农民可根据产量分布情况为下一季的精准农业生产管理制定种植、施肥、喷药等定量决策、变量投入、定位实施的计划[1]。
因此,着力开发实时、快速、方便、精准的联合收获机在线测产系统,实现在收获过程中对作物产量及其空间分布差异性信息的在线实时获取,是促进农业机械装备智能化发展的重要保障。在利用在线测产技术进行谷物产量信息采集与处理方面,国内外研究人员开展了大量的相关研究,运用不同的传感器测量方法实现了谷物产量的获取。为了科学全面地总结梳理有关谷物联合收获机在线测产系统的研究内容和关键技术,本研究对国内外谷物产量信息采集技术成果进行归纳,综述了谷物联合收获机在线测产技术的研究进展,分析了当前测产技术所存在的局限性,探讨了适合我国谷物联合收获机在线监测系统发展的方向,为今后进一步开展农情信息采集技术和智能化农业机械装备研究提供有益参考。
1 谷物联合收获机在线测产技术
1992年,Ag Leader公司创始人首次将谷物产量监测器成功推向市场[8],迄今,国外谷物测产技术成熟,已累积了大量研究成果并开发了数款商业化谷物产量在线监测系统[3,9](表1)。目前,美国90%以上的谷物联合收获机都安装有产量监测系统,并应用农机远程信息管理服务平台,农业机械智能化水平较高,能够在收割作物的同时准确采集作物产量信息,并绘制产量分布图[9-12],有助于农田管理者合理制定精准的种植生产管理方案。
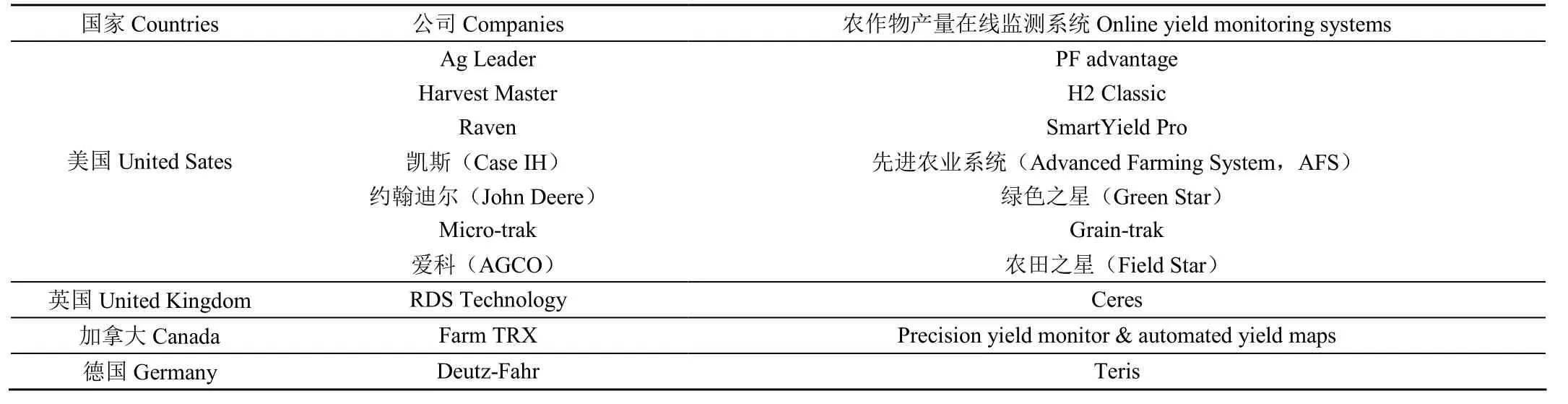
表1 国外部分商品化农作物产量在线监测系统Table 1 Some foreign commercial online monitoring system for crop yield
在中国,谷物产量监测技术应用较少,基本没有商品化的测产装置,国内相关高校、学者正大力开展研究[13]。现阶段,国内外获取谷物产量信息的方法主要包括:动态称量测量、体积测量、冲击力测量、射线测量和其他测量方法。1987-2019年具有代表性的谷物在线测产方法如表2所示。
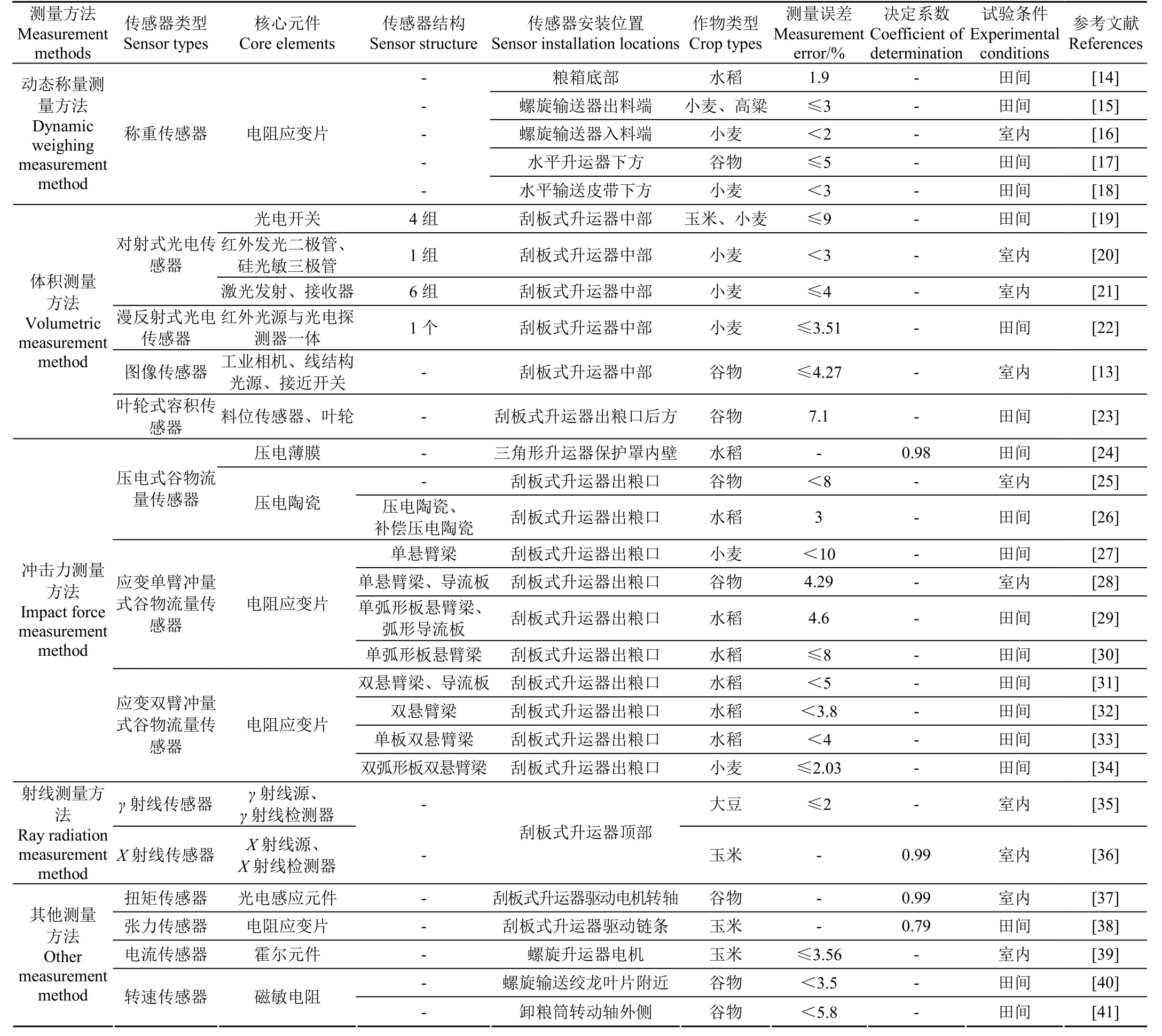
表2 谷物联合收获机在线测产方法的分类Table 2 Classification of online yield measurement methods for grain combine harvester
1.1 动态称量测量方法
动态称量测量方法主要是基于谷物流量与质量的关系,以称量测量为核心技术,通过电阻应变式称重传感器(简称称重传感器),对粮仓或工作状态下的输粮部件称量,以得到谷物产量。Colvin[42]将收获机粮箱悬挂在2个称重杆上以获得谷物的质量,其中称重杆的载荷端悬挂粮箱,另一端固定在机器上。李长占等[6]和Iida等[43]将称重传感器安装于收获机粮箱底部以确定谷物的总质量。肖兵兵[44]基于称重传感器开发了联合收获机玉米称量系统,绘制了玉米棒穗的产量分布图。王志全等[45]设计了动态旋转秤系统,实验室动态测量误差在±5%以内。于小娟[14]利用称重传感器对粮箱称量,基于集合经验模态分解算法(Ensemble Empirical Mode Decomposition,EEMD)的小波阈值去噪算法分析信号,田间试验测产平均误差为1.9%。因直接对粮箱称量,故粮箱需与收获机结构独立,且在收获机行走颠簸时会产生较大的测量误差。目前,美国HarvestMaster公司的H2 Classic系统装有称重传感器,并采用称重补偿技术提高了系统的测量精度[46]。
Wagner等[15,47]将称重传感器安装于螺旋输送绞龙出料端进行称量,螺旋输送绞龙的重量与通过螺旋输送绞龙的谷物流量成正比,田间试验精度在3%之内,该系统最大的应用限制是联合收获机的安装空间有限。张小超等[16]采用螺旋推进称质量式技术,通过单点悬挂称重传感器获取绞龙筒的质量,实现了收获作物产量流量测量,室内试验台架累计试验误差小于2%,但传感器安装结构比较复杂。苑严伟等[48]以螺旋推进称质量式产量流量计为核心开发了测产系统,能在线实时显示谷物产量波形曲线和产量分布图、联合收获机的收割面积和行走轨迹等。Schrock等[17]对三角形结构的水平升运器称量,一端作为转动轴,另一端安装在称重传感器上,当试验谷物为2 097 kg时最大误差为5%,但改装工作量较大。李伟等[18]应用称重传感器对水平皮带输送器实时流过的谷物进行称量测量,田间测产相对误差小于3%。
1.2 体积测量方法
针对具有刮板式升运器输粮结构的联合收获机,获取谷物质量可利用体积测量方法。体积测量的基本原理是已知谷物密度,通过测量谷物体积,最终确定谷物的质量。谷物体积测量可分为两种方式,测量一定时间内的谷物体积和记录积累一定谷物体积所需的时间[49],分别通过光电传感器、图像传感器和叶轮式容积传感器实现谷物体积的在线测量。光电传感器和图像传感器通过测量刮板式升运器每一刮板上的谷物厚度计算出谷物的体积,是一种非接触式的谷物流量测量技术。光电传感器由光发射器和光接收器组成,分为对射式光电传感器和漫反射式光电传感器。
1.2.1 对射式光电传感器
对射式光电传感器的光发射器和光接收器处于同一轴线上分别安装于刮板式升运器的两侧,且轴线垂直于升运器中谷物的输送方向,使光束横穿升运器[20],如图1a所示[50]。通常,光发射器为红外发光二极管,光接收器为光敏三极管,当谷物通过传感器的光路时,光路被阻断或衰减,使光接收器输出电压发生高低电平的变化[51]。因此,通过记录光电传感器输出脉冲信号的持续时间以确定刮板上谷物的厚度,根据刮板底面积和谷物密度最终完成谷物体积的测量[52-53]。
目前,基于对射式光电传感器开发的测产系统包括,美国Raven公司的Smart Yield Pro系统、英国RDS Technology公司的Ceres系统、加拿大Farm TRX公司的Precision yield monitor & automated yield maps系统等。Strubbe等[19]在刮板的长轴方向和短轴方向分别放置2组光电传感器,其中竖直方向的2组传感器对称放置于升运器驱动链条两侧,其测产最大误差为9%。Hanigan[50]为提高近红外光电传感器的测产精度,利用单刮板式升运器试验台确定了传感器的最佳安装位置和采样频率,并对刮板进行了优化设计。
1993年,王要武等[20]率先在国内进行了谷物流量动态在线测量方法的研究,首次提出联合收获机在收获过程中获取谷物产量的重要性。利用一组对射式光电传感器实现了小麦产量的测量,实验室相对误差小于3%,但未考虑刮板式升运器转速的变化。雷朝鹏[54]以红外激光源和硅光电池作为传感器的发射器和接收器,室内试验表明,当谷物流量为1.8 kg/s时,测量相对误差为2.05%。赵湛等[55]基于近红外光电效应的谷物厚度测量方法研究结果表明,当红外线波长为940 nm时,水稻籽粒厚度测量结果的相对误差小于6.5%。王坤[29]沿升运器刮板侧壁对角线均匀安装了5组对射式激光传感器,将各路测量区域谷物体积求和实现了谷物体积流量的测量。韩帅军[21]选用6组对射式激光传感器构成的二维阵列设计了谷物流量传感器,刮板的长轴方向放置4组光电传感器,短轴方向放置2组光电传感器,室内小麦流量试验测量结果相对误差小于等于4%。因发射器与接收器安装时需对准于同一轴线上,进而加大了安装难度。
1.2.2 漫反射式光电传感器
漫反射式光电传感器的光发射器和光接收器集于一体,安装于刮板式升运器的侧壁上,如图1b所示[29]。当升运器刮板输送的谷物经过漫反射式光电传感器时,光发射器发射的光被谷物反射回光接收器中,使光接收器接收到光信号并产生脉宽信号,脉宽信号的持续时间与刮板上谷物厚度成正比,同理可计算出刮板上谷物的体积。
付兴兰等[22,56]自主设计了基于光电漫反射原理的谷物产量计量系统,可对谷物产量、收获机行进速度和位置等信息进行实时在线测量、显示和远程通讯。小麦田间试验表明,系统误差最大为3.51%。安晓飞等[57]基于光电漫反射原理,建立了分段式光电信号与收获机谷物产量数据转换模型。田间试验结果表明,谷物产量计量模型验证误差小于3.5%。该测量方法要求传感器探头应时刻保持清洁干净,避免灰尘干扰测产精度[58]。此外由于机器振动、颠簸,谷物可能从刮板上掉落误触光电传感器。同时,刮板式升运器转速的变化和刮板上谷物的不均匀性会降低测产精度。
1.2.3 图像传感器
为解决光电传感器存在的误触发问题,杨刚等[13]设计了基于图像传感器的谷物测产系统(图1c),通过接近开关触发相机对刮板上的谷物拍照,利用修正的结构光测量模型测量谷物厚度,根据谷物容重和体积模型计算出谷物质量。室内测产试验结果表明,相对测产误差在4.27%以内,但系统成本较高。
1.2.4 叶轮式容积传感器
利用容积式测量方法获取谷物质量,主要通过叶轮式容积传感器实现。叶轮式容积传感器位于刮板式升运器出粮口后方,安装于升运器出粮口和螺旋输送绞龙、粮箱之间,由料位传感器和叶轮组成,如图2所示[3]。谷物离开升运器进入叶轮单元格,逐渐填充到一定体积时触发料位传感器,驱动叶轮转动继续填充下一单元格[9]。根据每一叶轮单元格的已知体积、填充时间和叶轮的转动次数,可计算出谷物的流量和体积。Searcy等[23]使用叶轮式容积传感器生成了产量图,1.3 hm2土地的总产量误差为7.1%。由于叶轮式容积传感器需较大的安装空间,且安装改造过程繁琐复杂、测量的不连续性[9]限制了其近些年的研究应用和推广。
1.3 冲击力测量方法
基于传统压力传感器衍生出谷物冲击力测量技术,开发了基于冲量原理的谷物流量传感器,主要由冲击板和压力传感器组成,且两者刚性固定为一体,安装于刮板式升运器顶部的出口处,升运器抛出的谷物周期性地碰撞在冲量式谷物流量传感器(简称冲量式传感器)的冲击板上如图3所示[59]。
冲量定理如式(1)和式(2)所示[60]:
式中Δt为谷物离开升运器刮板运动到冲击板的时间,s;F(t)为Δt时间内谷物作用于压力传感器的冲击力,N;Δm(t)为Δt时间内与冲击板发生碰撞的谷物质量,kg;Δv为谷物流碰撞冲击板前后水平方向速度的变化量,m/s;q为谷物质量流量,kg/s。已知谷物流碰撞冲击板前的水平方向速度v为升运器速度,假设碰撞到冲击板后的速度v0近似为0,则速度的变化量Δv可近似为升运器速度v。因此,可通过测量谷物冲击前后动量变化所产生的力实现谷物质量流量的实时测量[61-63]。
因冲量式谷物流量传感器具有结构简单、安装方便、成本较低等特点,目前国外大多数商品化产量监测系统均采用该谷物流量传感器,如美国Ag Leader公司的PF advantage系统、美国凯斯(Case IH)公司的先进农业系统(Advanced Farming System,AFS)、美国约翰迪尔(John Deere)公司的绿色之星(Green Star)系统、美国Micro-Trak公司的Grain-Trak系统、美国爱科(AGCO)公司的农田之星(Field Star)产量监测系统和德国Deutz-Fahr公司的Teris系统等[9,50]。PF advantage系统冲量式谷物流量传感器安装于刮板式升运器的出口处如图4所示[64]。
有研究表明[65-66],商品化测产系统在实际使用过程中测量精度不稳定且测量误差较大,存在产量空间分辨率不高、系统通用性不强等问题。Kormann等[67]对美国Ag Leader公司的谷物产量监测器进行了多年的田间测产研究,其测量相对误差在5.37%~10.11%之间,低于Ag Leader 公司给出的测量精度。Arslan等[68]在实验室试验台上测试了Ag Leader 产量监测仪,最大测量误差为9.17%。Taylor等[69]研究发现,对测产系统进行标定,并控制恒定的谷物流量,可提高测产精度。中国学者张漫等[70-72]引进美国凯斯(CASE IH)公司的先进农业系统(Advanced Farming System,AFS)绘制了小麦等农作物产量分布图,系统标定后的相对误差为1.32%。
目前,冲量式谷物流量传感器根据核心元件不同分为两类,包括压电冲量式谷物流量传感器和应变冲量式谷物流量传感器。其中,应变冲量式谷物流量传感器根据压力传感器个数不同,分为应变单臂冲量式谷物流量传感器和应变双臂冲量式谷物流量传感器。
1.3.1 压电冲量式谷物流量传感器
压电冲量式谷物流量传感器的感应元件一般为压电薄膜和压电陶瓷,其测量原理是压电效应。当压电陶瓷、压电晶体、高分子压电材料受到外力作用时,不仅几何尺寸会发生变化,而且内部会被极化,表面产生与应力成比例的电荷。因此,可根据电荷量判定材料所受外力的大小[73]。
Schrock等[24]将压电薄膜置于刮板式升运器保护罩内壁,根据谷物对贴有压电薄膜保护罩的冲击,建立了水稻冲击力与水稻质量流量的数学模型,决定系数为0.98。但压电薄膜长时间受谷物冲击会出现比较严重的磨损,需频繁更换新的压电薄膜传感器。2001年,孙宇瑞等[25]首次在国内运用基于冲量原理的谷物测产技术,利用压电陶瓷基片作为传感器的核心元件自主研制了冲量式谷物流量传感器,装置在引入外部机械振动的情况下,测量误差的绝对值小于8%。高建民等[26,74]设计了一种具有3个压电陶瓷和1个补偿压电陶瓷的冲量式谷物流量传感器,田间水稻测产试验误差平均值约为3%。王刚等[75]将2块压电陶瓷固焊在薄钢板上,并将钢板采用悬臂梁结构方式安装于刮板式升运器出粮口以拦截谷物流,在线测产系统误差在5%以内。
1.3.2 应变单臂冲量式谷物流量传感器
Borgelt等[76]研发了基于应变片的单臂冲量式传感器,利用应变式压力传感器采集运动着的谷物对冲击板形成的冲击力,而实现谷物质量的计算。Iida等[77]对单臂冲量式传感器结构进行了简化,田间试验结果显示,传感器输出信号与小麦和水稻流量的决定系数分别为0.95和0.99。Strubbe[78]在联合收获机谷物脱粒分离部分安装了单臂冲量式传感器,以估算脱粒谷物的质量。周俊等[27,60,79-80]利用贴有电阻应变片的悬臂梁压力传感器和谷物冲击板自主设计了单臂冲量式谷物流量传感器,并利用高分子阻尼材料裹住悬臂梁以消除振动的影响,其传感器结构示意图如图5a所示。试验结果表明,小麦田间测产误差小于10%。张凤传等[81]在传感器受力悬臂上安装了一个面积较大的冲击板,以接受尽可能多的谷物冲击,该传感器测量相对误差不大于6%。陈巡洲[62]采用具有较强抗干扰能力的双孔平行梁结构设计了单臂冲量式传感器,室内和田间结果表明,冲量式传感器测产误差在6~10%之内。王琦[82]基于控制器局域网总线(Controller Area Network,CAN)通讯方式设计了以单臂冲量式谷物流量传感器为核心可人机交互的联合收获机谷物流量智能监视器。陈树人等[83-84]在刮板式升运器出粮口顶部安装了导流板,导流板与流量传感器弹性元件相切,可提高冲量式谷物流量传感器的输出电压信号强度约30%。姜国微等[28]设计了一种具有导流板和橡胶减震器结构的单臂冲量式谷物质量流量测量装置如图5b所示,联合收获机静止时测量误差平均值为4.29%。仇华铮等[85]基于自主研制的具有导流板结构的GSM-1型单板冲量式谷物流量传感器,测量误差小于等于5.4%。张成龙[86]和王薄等[63,87]设计了带有4个靶条的单臂冲量式谷物流量传感器,但靶条的间隙会流失很多谷物,增大了测量误差,且传感器冲击板较宽,易与刮板式升运器壁发生摩擦。Kargarpour等[88]利用悬臂梁压力传感器和弧形冲击板组成单臂冲量式谷物流量传感器,安装于刮板式升运器顶部以获取产量数据,并结合全球定位系统(GPS)生成了产量图,试验最大误差为9.98%。王坤[29]针对搅龙式输粮结构设计了具有弧形导流板、弧形冲击板结构的单臂冲量式谷物流量传感器如图5c所示。田间水稻收割试验中,系统测量平均相对误差为4.6%,但当谷物流量较大时,传感器标定曲线拟合系数低,测量误差较大。王吉中等[30]和张伟[89]采用弧形冲击板与悬臂梁压力传感器组合设计了单臂冲量式谷物流量传感器如图5d所示,并开发了谷物测产系统,田间水稻收获试验测量误差在8%以内,但可靠性较低,所需安装空间较大。
1.3.3 应变双臂冲量式谷物流量传感器
胡均万等[31]在联合收获机的出粮口安装了具有导流作用的双臂冲量式谷物流量传感器(图 6a)并设计了差分消振电路,该传感器由2个悬臂梁力压传感器和2块冲击板组合而成,其中1个悬臂梁压力传感器和1块冲击板组合用于测量谷物的冲击力和机器的振动,另1个悬臂梁压力传感器和另1块冲击板组合用于感受机器的振动,随后通过差分消振电路,消除了车身振动对测产精度的影响,田间水稻测产误差小于5%。陈树人等[32]对双臂冲量式谷物流量传感器(图6b)的静态受力特性进行分析,结果表明传感器的输出信号与静态力作用点的位置无关,且田间水稻测产精度误差小于3.8%,但谷物流量大于2 kg/s时,测产误差将增大。韦玮[90]利用双臂冲量式谷物流量传感器开发了联合收获机测产系统,田间水稻测产相对误差在8%以内。刘成良等[33]设计的双悬臂梁谷物流量传感器如图6c所示,测量悬臂梁上固定有冲击板,参考悬臂梁上无冲击板固定,其田间水稻测产误差小于4%。李新成等[34,59,91]和吴关[92]设计了2个弧形冲击板的双臂冲量式谷物流量传感器(图6d),并开发了谷物智能测产系统,田间小麦测产最小误差为2.03%。
冲量式谷物流量传感器测量精度易受多种因素影响,如传感器安装角度[9,93-94]、刮板式升运器速度[72]、收获机振动[25]、谷物含水率[19]、田间坡度[95]和谷物流量的不稳定性[9],其中联合收获机的振动影响最为显著[96-97],最重要的是当谷物流量较大时,谷物流量与谷物冲击力呈非线性关系[98]。
1.4 射线测量方法
射线测量方法利用射线强度的衰减程度表征刮板式升运器抛出的谷物质量流量,通过射线传感器实现。射线传感器由射线源和射线检测器组成,射线源的辐射与射线检测器对准,分别安装于升运器的出口处如图7所示[3]。检测器探测到的射线强度越弱,说明流经射线源和检测器之间的谷物质量流量越大[63]。应用于谷物流量测量的射线传感器主要有γ射线传感器和X射线传感器。美国爱科(AGCO)公司1993年己成功将γ射线传感器测产技术应用于康拜因收获机的谷物流量测量中,实现了商品化[11]。张惠莉等[35]率先在国内将γ射线传感器用于农业装备测产系统研究中,实验室大豆产量测量精度在2%以内。Arslan等[36]通过室内试验验证了玉米质量流量与检测的X射线强度具有较强的相关性,决定系数为0.99。国外研究结果已经证实,使用γ射线和X射线传感器测量精度最高,且具有其它测量方法所难以替代的不受机器振动和粉尘污染影响的优点,但由于其制造成本高,且使用电磁辐射有严格标准,会对操作者及周围环境造成潜在的危害,因此未被普遍推广应用[2]。
1.5 其他测量方法
在谷物质量的其他测量方法中,国内外研究学者通过监测联合收获机主要部件工作参数,提出了根据部件工作参数计算谷物产量的研究方法。监测装置主要包括扭矩传感器、张力传感器、电流传感器和转速传感器。
Loghavi等[37]运用扭矩传感器发现刮板式升运器驱动电机的功耗与升运器输送的谷物质量两者有较强的相关性,决定系数为0.99。Veal等[38]利用张力传感器研究发现刮板式升运器驱动链上的张力与喂入谷物的质量有关,决定系数为0.79。赵晨等[39,99]运用电流传感器建立了螺旋升运器驱动电机工作电流与谷物产量瞬时变化的关系,室内玉米测产试验结果表明,试验台测量误差小于等于3.56%,但获取的升运器参数不能实时计算出谷物产量。Shoji等[40]通过转速传感器获取螺旋输送绞龙的转速来确定每次释放出的谷物质量,测量误差小于3.5%。路昌华[41]利用转速传感器研究了卸粮筒转速与谷物瞬时流量的关系,设计了基于水平定量螺旋输送技术的谷物产量计量系统,在大田动态试验中,系统整体误差小于5.8%,但通用性较低。
2 讨 论
目前,谷物联合收获机在线测产技术主要包括动态称量测量方法、体积测量方法、冲击力测量方法、射线测量方法和其他测量方法。综上所述,在线测产技术用于联合收获机时存在的局限如下:
1)可行性:螺旋输送绞龙称量、主要部件工作参数确定产量等方式所需安装空间较大,改装过程复杂繁琐且工作量大,但联合收获机结构设计紧凑,使得测产系统安装应用不切实际;同时考虑测产时可能造成的人身伤害,降低了射线测量方法的适用性;冲力测量方法虽应用广泛,但尚未考虑谷物与冲击板碰撞对谷物造成的机械损伤,而损伤后的谷物在贮存过程中更容易发生霉变,一定程度上降低了种子的发芽率,并影响了粮食加工后的品质和等级。
2)通用性:收获对象的多样性,决定了联合收获机结构的差异性。由于不同收获作物的理化特性各异,以及净粮输送结构不同,导致产量测量方法、传感器安装方式和位置会有所不同。目前国内外产量在线监测系统大多应用于输送结构为刮板式升运器或螺旋输送绞龙的谷物联合收获机,且仅局限于小麦、水稻、玉米等普通农作物的产量测量,尚未探索应用于其他输送结构或经济价值较高农作物的联合收获机测产方法。
3)稳定性与准确性:谷物联合收获机作业过程中,机器自身的基础振动、田间地面不平造成的颠簸、倾斜或地头调头、紧急刹车等特殊工况下,谷物由于惯性作用,采用粮箱动态称量和刮板上谷物体积测量方法测产时,其质量和体积在粮箱、刮板上易出现较剧烈的变化。同时受农作物品种、密度、含水率等的影响,实际测产精度较低。因此,仅通过测产传感器较难获取准确的农作物产量。
3 结论与展望
在部分发达国家,联合收获机在线测产技术已经逐步成熟,谷物联合收获机基本都装备了智能化测产系统,运用不同的测量方法完成田间谷物产量监测,生成产量空间分布图,为实施精准农业提供了丰富、准确的信息。在中国,受土地分散经营、农机具保有量较低、农民对精准农业认识浅薄、经济实力较弱等影响,中国智能化农业机械刚刚起步,精准农业实施力度不强,谷物联合收获机在线测产技术相对滞后、不够成熟,多处于试验研究发展阶段,尚未实现商品化推广。
因此,结合中国国情和农业生产的特点,对比发达国家在线测产技术和农业机械装备智能化进程,在未来农作物产量在线监测技术的研究中,建议从以下几个方面重点突破:
1)合理改革农业生产模式,提高农业管理者和从业者对精准农业的认识。中国幅员辽阔,不同的地区经济水平和技术水平差异巨大。如北方地区农业生产主要以小规模分散经营方式为主,经济条件落后、农业机械化程度较低,这种比较粗放的管理模式,制约了中国现代农业的发展。应鼓励农民推行大规模集约化经营方式,提高农业机械的规模化作业水平,加强广大农户对精准农业技术的应用意识,实现信息、农机、农艺相融合,为农作物产量在线监测技术的研究和应用创造必要的条件。
2)全面立足中国农业机械装备发展阶段,深入提升测产传感器可行性、通用性、稳定性与准确性的技术。针对不同联合收获机结构、不同收获作物,应以不造成作物机械损伤为前提,采用统一、简单、便捷的传感器安装方式,设计基于无线传感技术的低成本、高精度智能测产传感器,重点攻关减少因收获机振动、颠簸引起测量误差的关键技术难题,以加速推进中国智慧农业生产管理体系的发展。
3)积极引进国际先进的智能监测技术,研发功能强大的联合收获机在线监测系统。借鉴国外开发的联合收获机智能在线监控系统,对农业机械智能化远程在线服务与管理技术进行引进、消化、吸收和再创新,以进一步优化中国现有测产研究技术,着力研发具有测产功能、在线实时显示收获机地理位置功能、生成产量分布图功能,以及农机具状态监控、实时调度等功能的联合收获机在线监测系统,并以田间应用为目标实现商品化。