通信感知一体化中的无线电地图技术
2021-11-24徐靖,杨杰,高波,金石*
徐 靖,杨 杰,高 波,金 石*
(1.东南大学 移动通信国家重点实验室,江苏 南京 211189;2.中兴通讯股份有限公司,广东 深圳 518001;3.移动网络和移动多媒体技术国家重点实验室,广东 深圳 518001)
0 引言
目前, 5G已完成标准冻结并逐步迈入商用,不仅在技术层面为大规模多输入多输出(Multiple-Input Multiple-Output,MIMO)和毫米波系统的实用与部署提供了支撑,也在应用层面有力推动了物联网(Internet-of-Things,IoT)、车联网、远程医疗、智慧城市以及虚拟现实等新业务的出现与发展。面对日新月异的通信需求和业务形态,无线通信技术也必须不断发展以跟上时代的步伐,因此学术界已经开始了6G技术的预研,其中通信感知一体化技术被众多专家学者认为是十分具有潜力的下一代移动通信技术之一[1-2]。
通信感知一体化技术是指以复用频谱资源和硬件资源的方式为无线通信系统增添一定的环境感知能力,通信感知一体化能够为系统带来两方面的益处:① 通信感知一体化能够增强无线通信系统的通信能力,例如探测信号覆盖盲区、辅助进行信道反馈[3-4]等;② 通信感知一体化为无线通信系统带来了附加的功能和商业价值,例如提供定位[5-7]、手势识别[8]及跌倒检测[9]等功能。目前,考虑到系统的可行性与经济性,通信感知一体化方案通常基于无线通信系统现有的信道估计功能实现,即通过测量与传输环境高度相关的无线信道实现环境感知,而不需要为通信系统加装额外的环境测量设备。常用的描述无线信道的测量值包括接收信号强度(Received Signal Strength,RSS)和信道状态信息(Channel State Information,CSI),这些信道量通常对噪声、干扰和硬件损害较为敏感,因此如何提取出其中与传输环境相关的有用部分给课题研究带来了巨大的挑战。近年来,以大规模MIMO、毫米波等为代表的先进无线通信技术逐渐成熟,其中大规模MIMO技术带来了波束成形和定向传输能力,而毫米波频段的充裕带宽资源则赋予无线通信系统更高的时间分辨率。得益于此,CSI等信道参数能够越来越精确地刻画现实传输环境,为通信感知一体化的研究和发展打下了基础。
通信感知一体化在使无线通信系统张开“眼睛”的同时,也带来了新的问题和挑战。从硬件成本的角度来看,在通信对象不断从人与人向人与物、甚至物与物进行扩展的当下,低速率、低成本、低功耗的IoT无线设备得到了爆发式的增长,而通信感知一体化设备一般要求具有MIMO天线阵列、高精度信道测量能力和强大的数字处理能力,显然难以与低成本IoT设备相契合;从应用价值的角度来看,研究者希望环境感知结果的运用不止局限在通信设备内部,而应该服务于更多的内部和外部应用。因此,研究者提出可以将区域内通信感知一体化设备感知到的特征进行汇总和处理,并以一张“地图”的形式加以展现,称为无线电地图。无线电地图脱离了具体的硬件设备,可以由一台专用的通信感知设备构建,或者以“众包”的形式由区域内大量小型通信感知设备合作构建,并进行上传;无感知能力的设备可以直接下载该无线电地图,受益于通信感知技术。无线电地图便利了区域内无线通信设备间的协作,并具备催生大量潜在融合应用的能力,目前已经受到了国内外研究者的广泛关注。
1 无线电地图的概念
无线电地图技术是通信感知一体化技术的延伸,既避免了固定环境特征的重复感知,又可以服务于无通信感知能力的低成本设备。国内外研究者已经对通信感知一体化与无线电地图技术进行了初步探索,从无线电地图的实现方式来看,现有学术成果可分为基于信道参数的无线电地图、基于通信性能的无线电地图和基于无线环境几何特征的无线电地图,它们为无线通信技术的发展提供了新的思路。
1.1 基于信道参数的无线电地图
在无线通信的典型场景中,由一个位置固定的基站(Base Station,BS)或接入点(Access Point,AP)服务多个移动终端,AP测量的上行信道参数或终端测得的下行信道参数通常会随着终端位置的变化而变化,而基于信道参数的无线电地图就是通过采集大量位置坐标和对应位置处的信道参数进行构建的一种无线电地图。基于信道参数的无线电地图算法在实践中通常分为采集数据的离线阶段与实际应用的在线阶段:离线阶段,需要规划大量的采样位置并测量位置坐标,例如以网格采样法进行位置采样,然后通过信道测量设备测量每个位置处的信道参数;在线阶段,可以根据实时测量的信道参数查询无线电地图从而获取终端位置的估计,或者根据终端位置提取对应的信道参数以优化通信性能。
基于信道参数的无线电地图算法一般使用RSS或CSI作为指标。RSS描述了一小段时间内的平均接收信号功率,经典的RSS模型可表示为:

(1)

(2)
其中,h(f)为信道频域响应,L为传播径数量,gl为第l条传播径的复增益,τl为第l条传播径的传播时间(Time of Arrival,ToA)。CSI的相位信息对位置变化极为敏感,因此可以用来实现手势识别、呼吸率探测等细粒度的感知任务。
1.2 基于通信性能的无线电地图
不同于基于信道参数的无线电地图采用可以直接测量的数据作为指标,基于通信性能的无线电地图通常将信道参数加以处理和特征识别,并以传播场景类型、信道容量、中断概率等表征通信性能的参数作为指标。其中,传播场景通常可以分为直达径(Line of Sight,LoS)场景和非直达径(Non Line of Sight,NLoS)场景,在两种场景下信道条件存在较大差异,因此以传播场景类型为指标的无线电地图可以帮助设备进行针对性调整以提高通信性能,或者根据无线电地图中NLoS区域的分布推断障碍物的大体位置。而信道容量和中断概率的计算相对较为复杂,在实践中信道容量可由香农信道容量公式进行估算:

(3)
而中断概率可以表示为信噪比大于门限的概率:
(4)
其中,C为信道容量,Pout为中断概率,SNR为信噪比,B为信号带宽,Pr(·)表示概率,γth为指定的信噪比门限。以信道容量和中断概率为指标的无线电地图反映了区域内各位置的基本通信质量,为无线资源规划提供了依据。
基于通信性能的无线电地图的构建可以采取离线测量的方式进行,可能需要进行繁重的测量工作并消耗大量时间,带来了较高的成本。近年来,随着计算机仿真技术的发展,运用光线追踪技术的信道仿真软件逐渐成熟,该信道仿真技术根据传播场景的三维模型和模型中各表面的电磁参数信息对无线信道进行仿真,具有较高的精度,因此基于通信性能的无线电地图还可以根据仿真数据进行构建以降低成本。此外,信道仿真产生的大量数据可以被机器学习(Machine Learning,ML)所利用,使无线电地图的构建更加智能化。
1.3 基于无线环境几何特征的无线电地图
随着大规模MIMO技术和毫米波技术的逐渐成熟,CSI拥有了越来越优秀的细粒度感知能力,研究者可以从CSI中提取出反射体位置等几何特征,从而构建基于无线环境几何特征的无线电地图。
如图1所示,考虑一个使用NRX根天线的标准线性阵列(Uniform Linear Array,ULA)接收机,天线阵列的间距d为入射信号载波波长λc的1/2。假设信源处于远场,则信号可以看作是以同一个到达角(Angle of Arrival,AoA)θRX分别被每一根天线接收。当信号被接收时,相邻天线的信号传播距离差为dsinθRX,因此信号会发生大小为Φ(θRX)=e-2πdsinθRX/λc的相位偏移。以天线0的信号相位作为参考相位,则这NRX根天线的相位差可表示为一个向量,称为导向矢量:
(5)

图1 N根天线的ULA接收机的入射信号模型Fig.1 Incident signal model of a N-antenna ULA receiver
当发射机也采用ULA天线时,信号的离去角(Angle of Departure,AoD)θTX对信号的相位会产生相同的影响,此时多径CSI的频域模型可表示为:
(6)
或等价表示为:
(7)
其中,H(f)=(hij)NRX×NTX表示第j根发射天线到第i根接收天线的CSI所构成的矩阵,ARX/TX=[a(θRX/TX,1),a(θRX/TX,2),…,a(θRX/TX,L)]为发射或接收导向矢量构成的矩阵,G(f)=diag(g1e-j2πfτ1,g2e-j2πfτ2,…,gLe-j2πfτL)为增益和时延导致的相移构成的对角阵。

(8)
(9)
(10)
(11)
(12)
(13)
其中,c为光速,atan2(·)为四象限反正切运算。通过式(8)~式(13)构建的关系,系统可以进一步由角度、时延信息估计出基站、反射点和用户的相对位置关系,而基站位置通常可以认为是已知的,从而可以确定反射点和用户的绝对位置。基于无线环境几何特征的无线电地图是一种记录上述几何关系的无线电地图,其记录的基站与反射体位置信息能够较为完善地描述无线环境的关键特征,具有数据量小、用途广泛等优点。
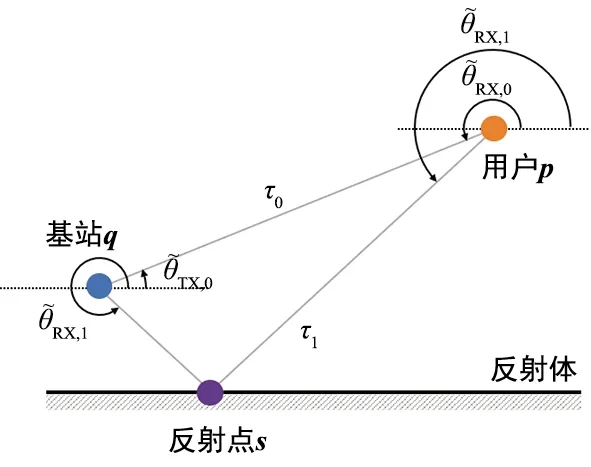
图2 无线环境几何特征示意图Fig.2 Illustration of the geometric relationship of wireless environment
2 基于信道参数的无线电地图
2.1 指纹匹配算法

DRSS=[DRSS(1),DRSS(2),…,DRSS(K)],
(14)
DRSS(k)=[rk(1),rk(2),…,rk(U)],
(15)
(16)

θRSS=[r(1),r(2),…,r(V)],
(17)
r(v)=[r1(v),r2(v),…,rL(v)]T,
(18)
其中,rl(v)表示带定位设备对来自第l个AP的信号进行第v次测量得到的RSS值。然后,指纹匹配算法通过某种分类方法f(·)将在线测量RSS与离线测量RSS进行匹配,从而估计出在线设备的位置:
(19)
在指纹匹配算法发展的早期,研究者主要关注的是分类原理对定位精度的影响,如文献[12-14]分别提出了基于概率模型分类器、机器学习分离器等多种分类原理的指纹匹配算法。随着研究的深入,研究者希望结合多种指纹与分类方法的优势并弥补各自的不足,文献[15]提出了一种可以融合多种指纹和分类器的指纹匹配算法框架,称为DIFMIC算法。该算法首先对来自不同AP的RSS测量值进行除法或差分运算以提高测量值的稳定性并消除测量值与测量设备的依赖性:
(20)
(21)

在分类器方面,DIFMIC算法提出采用如图3所示的多分类器架构与两步聚合网络进行精确定位。其中,fi表示第i种分类器,文献[15]实际使用了K最近邻、随机森林、朴素贝叶斯和AdaBoost四种分类器,二层聚合网络的参数ω与β由离线测量值训练得到。DIFMIC的位置估计过程可表示为:
(22)

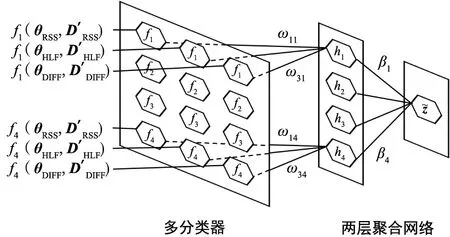
图3 DIFMIC算法结构图Fig.3 Structure of the DIFMIC algorithm
DIFMIC提供了一种可扩展的基于无线电地图的定位算法框架,除了上面提到的指纹类型与分离器,它还可以灵活地添加与更改,实验显示该算法在多个测试环境中的定位均方误差达到2.5 m左右,比其他采用单一特征和分类器的指纹匹配算法降低了20%~30%。
2.2 信道图算法
基于信道参数的无线电地图算法在实际应用中遇到的最大挑战在于构建地图的离线阶段,不仅带来了庞大的测量开销,也限制了无线电地图的灵活更新。文献[16-18]提出了一种基于特征提取与数据降维的信道图算法,该算法去除了繁琐的离线测量阶段,仅利用在线测量得到的CSI构建无线电地图。如图4所示,文献[16]通过位置坐标、信道参数、信道特征和信道图四个参数的转换完成信道图的构建,其中位置坐标为区域内待定位终端的D维空间位置(通常为三维或二维),相应图框中以形状各不相同的若干图形表示不同终端,并以箭头表示移动终端的运动轨迹;在信道图算法应用过程中,基站测量来自不同终端的上行信道参数,该信道参数通常为高维复数(例如CSI),由于信道参数与位置坐标具有一定相关性,位置接近的终端的信道参数也在一定程度上类似,因此相应图框中的图形保留了一定的局部位置关系,但仍发生了畸变;信道图算法首先利用特征提取算法提取出信道参数中与位置信息特别相关的特征,该特征通常也为高维复数量;最后信道图算法使用数据降维算法将高维复数特征降至低维实数量,称为信道图,其维度通常与位置坐标的维度相同。信道图算法的设计目标就是保留终端的局部位置关系,即在信道图中接近的终端在空间中也相互接近,反之在空间中接近的终端在信道图中也相互接近,因此该算法仅具有确定相对位置的能力。
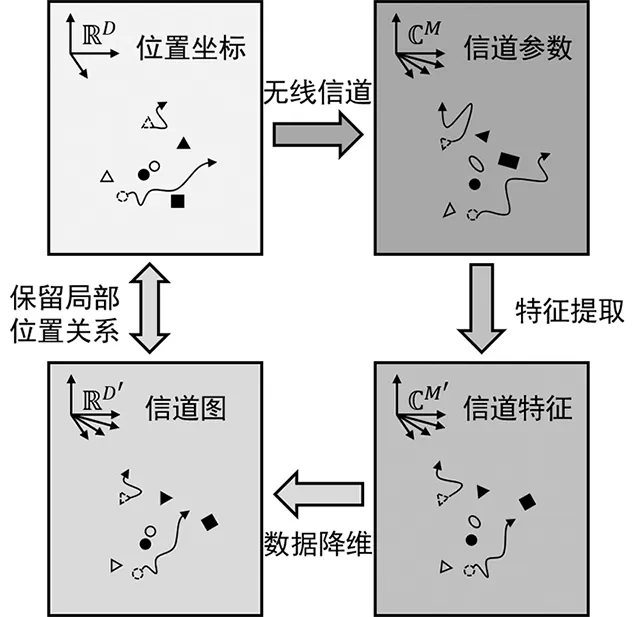
图4 信道图算法流程图Fig.4 Flowchart of the channel charting algorithm
具体的,信道图算法首先要求通过配备ULA天线的基站测量区域内所有终端设备的上行CSI。为了最小化噪声、干扰和其他因素对CSI的影响,算法使用CSI矢量的二阶原点矩作为原始信道参数:
(23)

(24)

(25)

2.3 RadioUNet算法
文献[22]提出的RadioUNet将解决无线电地图离线测量难题的工作又向前推进了一步,该算法提出可以使用基于卷积神经网络的无线信道仿真算法产生用于构建无线电地图的RSS数据,从而省去了费时费力的测量过程。与一般的神经网络相同,RadioUNet需要大量的训练数据进行监督学习,才能使网络收敛至优秀的性能。文献[22]提出可以结合城市的三维地图与光线追踪算法仿真出无线信道以低成本地获取训练数据,为此作者收集了700张不同城市区域地三维地图,每张地图中均放置了80个BS,然后通过信道仿真软件WinProp以光线追踪模式仿真了每张地图中的信号强度信息,从而获取了庞大的训练数据集RadioMapSeer,最后根据该数据集使用随机梯度下降法训练神经网络RadioUNet。
在算法的实际应用中,文献[22]构建了两种工作模式,不同的RadioUNet:在工作模式一中,需要将城市的三维地图和一个BS的位置输入RadioUNet,网络将输出该区域的RSS无线电地图,此工作模式又称为RadioUNetC;在工作模式二中,除了需要输入三维地图和BS位置,还需要输入一些位置的真实RSS值,RadioUNet同样会输出该区域的RSS无线电地图,此工作模式又称为RadioUNetS。当工作在模式二时,真实RSS值可以来自于区域内其他BS的测量,或者依赖于位置已知的终端进行测量,这些终端可以使用GPS等定位系统获取自身的位置。由于结合了信道仿真和一部分实测数据,模式二的RadioUNet具有更强的鲁棒性。文献[22]通过仿真实验表明,两种模式下的RadioUNet都能够达到较高的预测精度, 且RadioUNet算法的无线电地图预测精度超过了Tensor Completion[23]、RBF Interpolation[24]、MLP[25]、Tomography[26]等其他先进的无线电地图预测算法。
2.4 应用场景与优缺点
基于信道参数的无线电地图通常以RSS、CSI等可直接测量到的信道参数作为记录指标,由于缺乏对信道参数的深度挖掘和进一步处理,该类型无线电地图常常用于用户定位等粗粒度应用中,并且基于信道参数的无线电地图容易受到测量设备的影响,在跨设备应用中存在一定的挑战。此外,信道参数的测量往往需要消耗大量的时间与金钱成本,目前学术界已经发展出计算机仿真、机器学习等多种方法降低测量需求。
3 基于通信性能的无线电地图
3.1 基于LoS存在性的分区回归算法
LoS信号在无线通信系统中起着至关重要的作用,而LoS径的遮挡程度往往可以简单直观地反映某处的通信性能。文献[27]提出了一种基于分区回归的无线电地图构建算法,该算法根据无人机(UAV)测得的RSS将城市划分为LoS区域、半遮挡区域以及NLoS区域等多个区域,从而构建大致的通信性能地图。在建筑物密集的城市中,实际测量得到的RSS由于障碍物或多径的影响通常会偏离式(1)给出的经典模型,给无线电地图的构建带来困难。而将无线电地图按LoS径的遮挡程度进行分区,并为每个区域内的RSS模型分配不同的α、β,就能尽可能地降低模型误差ξ,从而使由UAV测量的RSS回归得到精确的模型参数成为可能。如图5所示,假设UAV的位置坐标为pv=(xv,yv,Hv),其中UAV高度Hv固定已知且大于最高建筑物的高度,固定用户的位置坐标为pU,则分区回归模型可表示为:
(26)
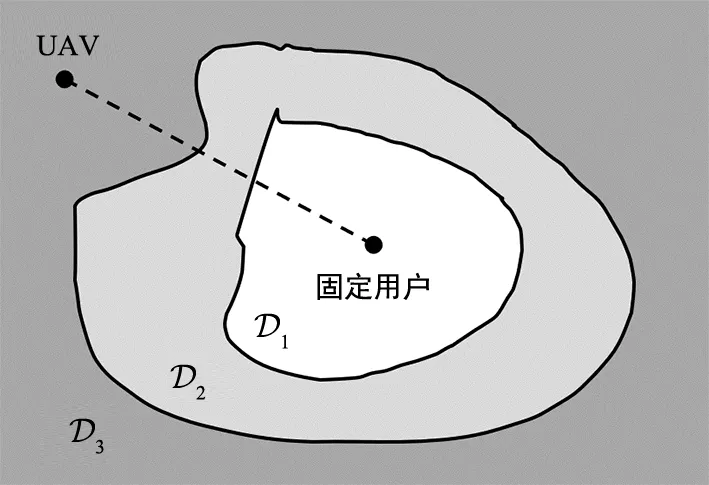
图5 分区回归模型示意图Fig.5 Illustration of the segmented regression model
与分区回归模型类似,文献[28]提出了一种基于两分区(LoS和NLoS)模型的三维城市地图重建算法。该算法假设城市中存在大量室外固定用户,UAV在以固定高度HD飞跃城市上空的同时测量来自所有地面用户的RSS,并通过机器学习算法估计UAV和用户间是否为LoS传播环境。如图6所示,若UAV和用户间存在LoS连接,则UAV、用户连线上所有建筑物的高度必须低于该LoS径。因此三维城市地图重建过程可以分为以下几步:首先将地图以5 m为间距进行网格化,并将每个网格高度初始化为建筑物最高高度Hmax;然后根据LoS径对建筑高度的要求调整网格高度,使网格高度等于符合要求的最大高度值;最后将高度小于Hmin的网格高度置为零。文献[28]通过仿真实验证明,当户外用户足够密集时基于LoS、NLoS两分区的三维地图重建算法能够将误差缩小至数米。
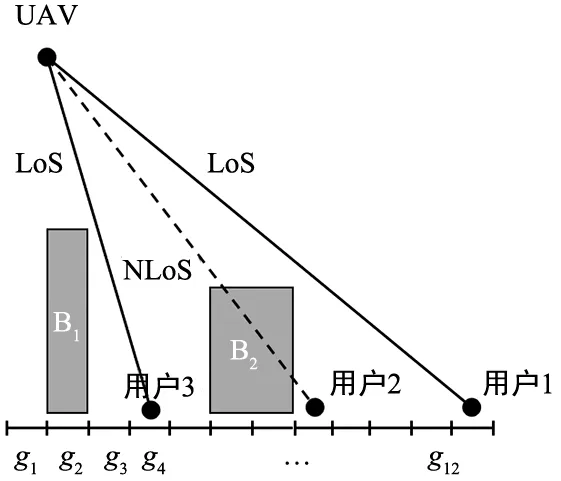
图6 三维城市地图重建算法原理图Fig.6 Illustration of the 3D city map reconstruction algorithm
3.2 基于中断概率的同步导航与无线电地图构建算法
在UAV飞行控制、实时视频数据回传等对可靠性要求较高的应用中,链接中断概率是一个重要的通信性能指标,能够为通信盲区识别、回避和补偿提供有力的支撑。文献[29]针对UAV的自主路线规划提出了一种同步导航与无线电地图构建(SNARM)算法,该算法结合基于深度强化学习(Deep Reinforcement Learning,DRL)的路径规划和基于中断概率的无线电地图,使UAV能够在不需要任何先验信息的情况下自主规划路径并构建中断概率地图。其中,在基于DRL的UAV路径规划中,UAV需要根据n时刻的位置坐标、通信中断概率和某种策略决定该时刻的飞行方向vn;在n+1时刻UAV会对新位置的坐标和通信中断概率进行测量,从而计算一个评价上一时刻决策好坏的奖励信号Rn,而通信中断概率越大得到的奖励就会越小;最后UAV会根据奖励信号对飞行策略进行调整以使奖励最大化,从而实现飞行路径的优化。
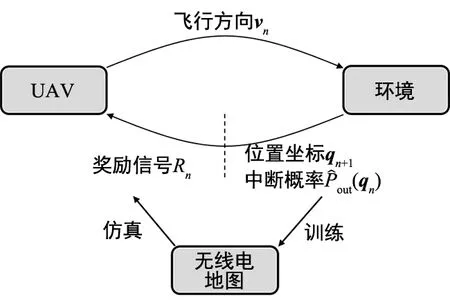
图7 SNARM算法框图Fig.7 Illustration of the SNARM algorithm
仿真实验表明,SNARM算法在训练前期性能稍弱于直接DRL算法,这是由于此时的无线电地图精度不佳、无法起到辅助训练的作用,但是在训练后期SNARM算法的性能相比于DRL算法得到了明显的提升,证明了算法的有效性和基于通信中断概率的无线电地图的作用。
3.3 速率图算法
近年来,毫米波技术的成熟使高速率的车用通信(Vehicle-to-Everything,V2X)成为可能,而多种多样的V2X应用也提出了各不相同的传输速率需求,例如2级/3级自动驾驶需要至少需要0.5 Mbit/s的传输速率,而4级/5级自动驾驶需要至少需要50 Mbit/s的传输速率等。文献[30]提出了一种基于仿真的传输速率地图构建方法,称为速率图算法,该方法以车流量、天线阵列位置和基站密度为输入变量对特定城市区域的传输速率进行仿真,从而提供对该区域内V2X应用可行性的验证。
速率图算法的框图如图8所示,算法由光线追踪信道仿真、交通流仿真、传输速率仿真模块构成,各模块间的时序控制和数据交换由Matlab协调模块实现。
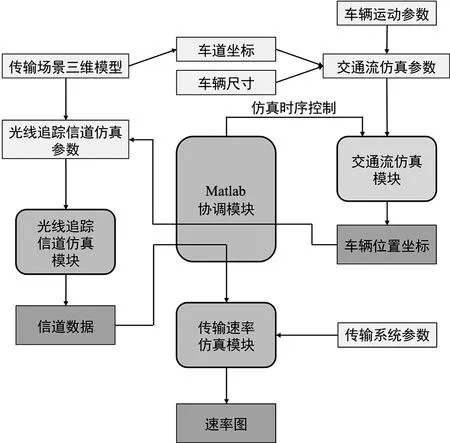
图8 速率图算法框图Fig.8 Diagram of the rate map algorithm
首先,算法要求输入传输场景的三维CAD模型,并且标识好场景中的车道坐标; 然后,使用开源的交通流仿真工具(Simulation of Urban Mobility,SUMO)结合车辆尺寸、行驶速度、车辆密度等车辆运动参数给出车辆位置的仿真坐标;再根据车辆坐标在场景CAD模型中添加车辆模型,并利用商业光线追踪仿真软件Wireless InSite仿真给定位置的基站到目标区域中各格点的信号传播角度和时延等信道数据;最后,速率仿真模块利用仿真出的信号角度和时延数据计算出给定MIMO-OFDM系统信道频率响应:
(27)
并根据香农信道容量定理计算出每个位置的平均最大传输速率R:
(28)
其中,AR∈NR×L、AT∈NT×L分别为信道到达角和发送角的导向矩阵[31],G[k]∈L×L为子载波k上各条传播径的增益所构成的对角阵,B为OFDM传输系统的带宽,P为信号能量,σ2为噪声方差,K、L、NR、NT分别为子载波数、传播径数、接收天线数和发送天线数。
3.4 应用场景与优缺点
基于通信性能的无线电地图不再局限于RSS、CSI等具体的信道参数,而是以LoS/NLoS通信场景、中断概率、通信速率等更加抽象的通信性能作为地图指标,这些通信性能在某些位置的突变往往预示了障碍物、反射体等环境要素的出现或消失,因此基于通信性能的无线电地图能够更加直观地反映环境的特征,能够服务于通信盲区检测、UAV轨迹规划等更多应用。但是,基于通信性能的无线电地图对环境的描述依然是粗略的,并且依然需要大量的测量工作。
4 基于无线环境几何特征的无线电地图
无线电地图技术是沟通通信与环境的桥梁之一,在发展过程中该技术不断由实际测量数据向抽象传播环境靠拢,并由此获得了更低的设备依赖性和更加通用的功能。近年来,随着毫米波技术和大规模MIMO技术逐渐步入商用,无线电地图技术的环境抽象能力得到了飞跃式提高。具体的,毫米波频段的丰富带宽资源便利了大带宽无线传输系统的实现,而大带宽系统具有的优秀时延分辨能力使距离的估计更加精确;大规模MIMO技术往往采用大规模阵列天线技术,该技术带来了更好的波束成形和方向性传输能力,使方向的估计更加精确。除了更高的距离和方向感知精度,毫米波固有的高路径损耗、低衍射和透射等缺点,反而在一定程度上减轻了多径效应对传播信道的“污染”,在毫米波信道的建模中往往仅考虑LoS径和单次反射径,极大简化了信道模型。在此模型中,基站和反射体的位置对用户信道起了决定性作用,而记录环境中主要反射体的位置坐标的地图便是一种基于无线环境几何特征的无线电地图。
即使信道模型大幅简化为仅由LoS径和单次反射径构成,利用信道参数推测环境中主要反射体的空间位置也是极为困难的,这是因为即使对于同一个平面反射体,反射点的位置也会随着用户移动而发生变化,而通过定位每个反射点来描述整个传播环境将是复杂并且昂贵的。文献[32]提出了一种基于虚拟锚(Virtual Anchor,VA)的反射体感知算法,大大简化了平面反射体的描述和处理。以如图9所示的二维场景为例,一个采用阵列天线的固定基站位于q处,在不失一般性的前提下可假设其阵列方向与x轴平行,并且基站不断发送用于信道估计的导频信号;一个同样采用阵列天线的移动用户由pk-1位置移动至pk处,其阵列方向与x轴夹角分别为αk-1和αk,移动用户的位置和朝向均为未知;k时刻的信道由一条LoS径和一条单次反射径组成,传播径的方向由离去角θTX,k和到达角θRX,k进行描述,传播径的长度由光速和传播时延的乘积cτk表示。如图所示,当基站和平面反射体位置固定时,无论用户如何移动,基站关于反射体的镜像——虚拟锚的位置也不会发生移动,利用该特性可以将基站与平面反射体的位置简化为虚拟锚的坐标,从而简化估计与处理流程。
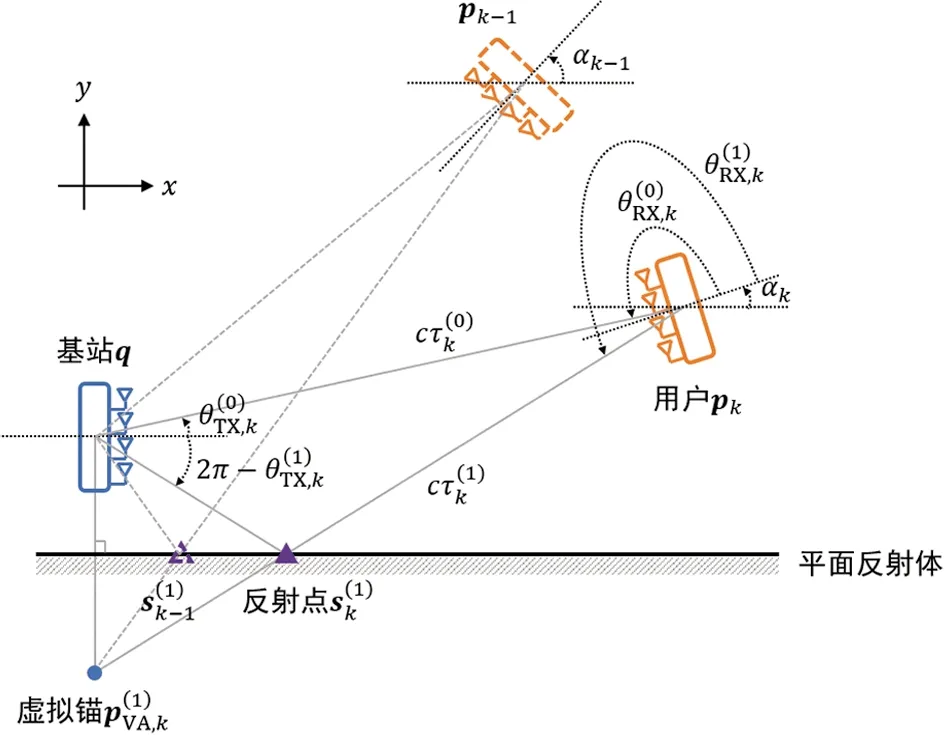
图9 基站、用户与虚拟锚的位置关系Fig.9 Geometric relationship between the BS,UE and VA
虚拟锚算法首先假设用户可以通过信道估计器对离去角、到达角、传播时延和传播径数量进行估计,上述角度、时延参数与用户、虚拟锚和反射点的实际空间位置的关系显然可表示为:
(29)
(30)
(31)
(32)
(33)
(34)
(35)
其中,εk为基站和用户间的未知时钟偏差,上标(0)表示该参数属于LoS径,而上标(j)表示该参数属于第j条反射径。通过式(29)~式(35)构建的角度、时延参数与虚拟锚位置的关系,用户设备可以根据信道测量结果求解出虚拟锚的位置。但是由于传播环境的复杂性,用户设备通常仅能接收到来自场景中部分反射体的反射信号,因此仅凭单个位置的测量难以给出场景中所有虚拟锚的位置。虚拟锚算法利用基于期望传播的同时定位与构图(Belief Propagation-based Simultaneous Localization and Mapping,BP-SLAM)算法解决了上述挑战,SLAM算法允许用户在场景内移动,并且能够同时完成用户定位和移动中观测到的所有虚拟锚的整合,从而构建一张完整的虚拟锚地图。
虚拟锚算法通过用户设备测量值的时间累积完成无线电地图的构建,但是并未利用多台用户设备并行以提高效率,这是因为不同用户设备间存在一定硬件偏差,例如不同的设备具有不同的接收功率、时钟偏差和阵列方向等,这些偏差妨碍了无线电地图的合作构建。文献[33]针对上述痛点对虚拟锚算法进行了扩展,该算法首先通过扩展经典的BP-SLAM算法进行多用户间测量偏差的自动估计与补偿,实现了即插即用式的协作框架。然后,文献[33]提出了允许多用户共享虚拟锚测量结果并合作构建、优化虚拟锚地图的众包SLAM算法,进一步提高了虚拟锚算法的性能。不仅如此,合作构建的无线电地图也会存储在云端并供各用户下载,用来辅助设备通信或加速本地SLAM进程。
在经典的虚拟锚算法中,虚拟锚被定义为基站关于平面发射体的镜像,因此多个基站会在同一个平面反射体上产生多个虚拟锚并导致无线电地图中虚拟锚的数量过大,限制了地图的构建速度与精度。文献[34]将同一个平面反射体的所有虚拟锚整合为一个主虚拟锚(Master Virtual Anchor,MVA),大大降低了需要跟踪的虚拟锚数量。图10以两个基站为例展示了虚拟锚、主虚拟锚与反射体的位置关系,其中主虚拟锚为坐标系原点(0,0)关于平面反射体的镜像,则虚拟锚的位置可表示为主虚拟锚和基站位置的函数:
(36)
因此,文献[34]提出的改进算法仅需估计出主虚拟锚的位置便可推导出完整的虚拟锚地图,仿真结果显示主虚拟锚算法大大提高了地图的构建速度和精度。
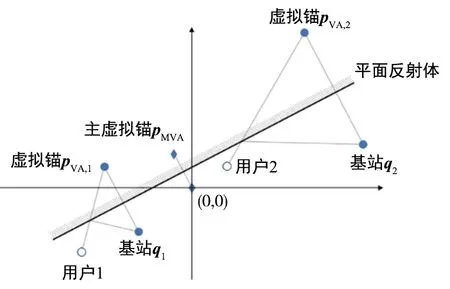
图10 虚拟锚、主虚拟锚与反射体位置关系示意图Fig.10 Geometric relationship between the VA, MVA and reflector
以虚拟锚算法为代表的基于无线环境几何特征的无线电地图技术是无线电地图领域的最新成果之一,该类型算法将传输环境抽象为若干平面反射体的集合并利用虚拟锚坐标加以表示,使设备可以通过交换虚拟锚的二维(或三维)坐标值完成环境信息的分享,大大便利了无线电地图的使用。此外,通过合适的误差估计与补偿运算,该类型无线电地图可在一定程度上摆脱设备硬件个体差异的影响,具有极佳的泛用性。目前,基于无线环境几何特征的无线电地图已经被应用在定位、波束训练等多个领域,受到了学术界的广泛关注。
5 结束语
本文首先介绍了通信感知一体化中无线电地图技术的研究背景和研究现状,将无线电地图按对环境的抽象能力由低到高划分为基于信道参数、基于通信性能和基于无线环境几何特征三类,分别总结了每种类别的无线电地图中关键的概念和常用的信号模型,然后分类别详细阐释了国内外研究者在无线电地图研究中取得的典型成果。总体而言,无线电地图的研究尚处于初步阶段,每种无线电地图技术均具有不同的应用场景与优缺点,其中基于信道参数的无线电地图主要记录接收机直接测量到的信道数据,其具有数据处理需求较低、环境的抽象能力低和易受硬件个体差异影响的特点;基于通信性能的无线电地图具有折中的数据处理需求和环境抽象能力,具有较高的应用价值;基于无线环境几何特征的无线电地图则由于其优秀的环境抽象能力和独立于接收硬件的特点被认为是具有潜力的无线电地图技术之一,但是该技术通常需要复杂而庞大的数据处理过程。尽管这些问题与挑战仍有待进一步研究,无线电地图技术在感知与环境数据分享中的潜力已经使其成为无线通信技术演进中备受关注的技术之一。