基于STM32的电缆管道智能巡检小车设计*
2021-11-23马海霞冯瑞珏龙华钊
马海霞,赵 睿,冯瑞珏,龙华钊
(1.广州城市理工学院电气工程学院,广州 510800;2.广东机电职业技术学院电气技术系,广州 510515)
0 引言
随着中国经济迅速发展,电网建设加快,特别是配电网规模逐步扩大,导致城市空间拥挤,在土地资源稀缺及城市美化需求的情况下,电力电缆线路正在被大范围地使用。配电网电缆通道分布广,一直是巡检的重点。但由于其环境空间有限,情况复杂,也是巡视工作的难点[1]。排管敷设是配电网电缆一种常见的敷设方式,是一种将电缆安装于预先铺设好的地下管道内的安装方式[2]。例如在穿过马路等区域时,为了防止车辆碾压等因素破坏电缆,需要使用排管敷设的方式进行电缆安放。实际在工程中会留出设计冗余,防止由于将来该地区用电量增加需要重新架设管道。所以有一部分备用电缆管道未敷设电缆,属于闲置状态。长期闲置的管道有可能在闲置的时间内出现诸如因为其他单位不当施工造成损伤、有异物进入管道、敷设错位等问题。需要有效的巡检工具发现这些缺陷以便能及时检修,使施工能够顺利及时地进行。目前智能机器人技术快速发展,使得利用机器人巡检成为可能。机器人代替人工巡检可以有效地解决电缆通道巡检的难点,而且有效地提高巡检的安全性。研究不同的爬行方式,以最大限度地克服电缆通道的复杂情况,实现可通行不同环境的机器人载体,并搭载有效的摄像头,以实现电缆通道内的可视化巡检目的。目前,国外的管道机器人费用较高,不适合我国的国情;国内关于管道机器人的研究还处于研究阶段,尤其是应用于电力系统电缆排管的管道机器人在国内还较少[3-5]。本文旨在设计一种用于电缆通道巡检的智能小车来代替人工巡检,有效预防隐蔽电缆的故障隐患,避免了人员在电缆通道内巡检所存在的触电或接触有害气体等风险,减少停电检修的范围,减少不必要的开挖,可以提高电力系统运行的安全稳定性,提升电缆通道智能化管理水平。本设计在提升供电可靠性的同时,可以显著降低运行电缆故障造成的社会影响,以提升电力企业的客户满意度。
1 智能电缆管道小车总体设计
如图1所示,电缆管道智能巡检小车系统主要由小车本体、摄像头和手持设备/PC三部分构成。小车设置安全绳,防止其因故障无法返回出口。使用时,将小车摄像头朝前放入电缆排管内,将安全绳挂在小车尾部,启动开关,电池为小车提供电源,通过手持设备操作小车,遥控小车可以在管道中前进、后退或停滞,在PC端上位机监控系统可以监控到管道内图像。
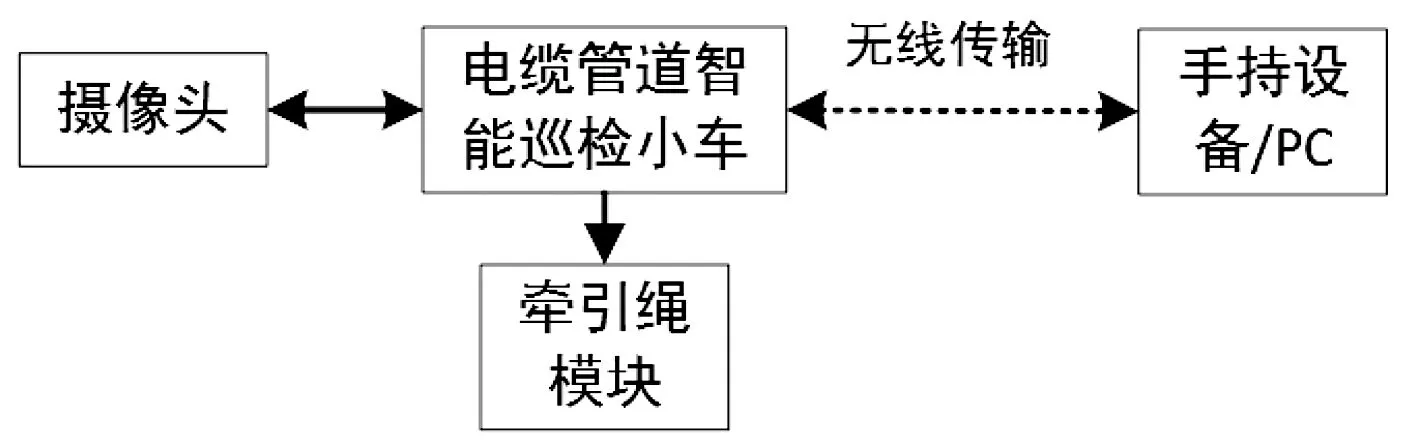
图1 系统结构
如图2所示,智能巡检小车使用STM32单片机作为主控芯片[6-7],动力由无刷电机提供,行驶速度约0.1 m/s。具有一定爬坡和过弯管能力,能爬上10°的斜坡,适应不大于5°的弯曲度。小车带有摄像头模块,采用LED灯照明,能观察前方及管壁的可见光图像情况,通过WiFi模块将图像实时传回到手持设备,图像分辨率为320×240,图像传输速度为1帧/s。牵引绳由牵引涤纶绳和绕线盘组成,主要作用为计算小车距起点距离,以及作为在事故时将小车拉出电缆排管的安全绳。上位机通过WiFi向单片机发送指令,单片机接收到指令后按要求驱动运动装置向目标位置运动。系统的电源为锂电池,为了计算锂电池的剩余容量,使用电压表实时测量电源两端电压,并由锂电池电压与剩余容量的关系推算剩余容量。上位机接收到单片机的信息后,解包为图片和数据,可在PC端和手持设备端进行查看。
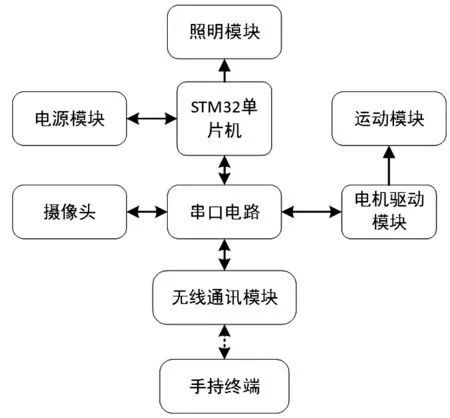
图2 电缆管道智能巡检小车设计方案
2 硬件设计
本文选用STM32系列单片机中的STM32F103ZET6作为主控芯片,ESP8266模块作为WiFi无线通讯、OV7725摄像头作为图像采集模块、无刷电机作为运动控制部分、LED作为照明输出部分。
2.1 单片机选用
本设计是选用意法半导体(STMicroelectronics)公司的STM32F103ZET6处理器。TM32F103ZET6使用ARM®Cortex™-M3 32位的RISC内核,其时钟频率可达72 MHz,内置了包括512 k字节的闪存和64 k字节的高速存储器(SARAM),同时拥有包括2个高级定时器、4个通用定时器、2个基本定时器共8个定时器,通信接口有2个I2C接口,5个USART接口等,共144个引脚。
2.2 摄像头模块
本系统选用OV7725摄像头[8-9],摄像头由广角镜头、OV7725传感器组成。考虑到所使用的单片机缓存较小,摄像头模块额外搭载了一块FIFO缓存芯片。当光线照到感光窗口上时,感光矩阵上产生与色光对应的电信号,经过处理后的电信号进入FIFO中缓存,然后通过GPIO串口传输到单片机中。OV7725为CMOS类数字图像传感器,该传感器支持输出最大30万像素(640×480分辨率)图像,OV7725有工作电压低、体积小的优点,支持通过VGA或QVGA时序输出图像数据,输出图像的数据格式支持YUV(422/420)、YCbCr422以及RGB565格式。本设计中使用的图像输出大小为240×320,输出图像格式为RGB565。由于感光窗口需要,OV7725传感器采用BGA封装,引脚全部在背面引出。OV7725的数据输出端口连接到FIFO的对应接口上,再与单片机相连。
2.3 无线通讯模块
本系统中选择使用ESP8266模块[10-12]进行无线通信。该模块体积小且功耗低,性价比高。ESP8266使用802.11 b/g/n无线标准,频率范围为2.4~2.5 GHz,能使用PCB板载天线与上位机通信。工作电压为3.3 V,平均工作电流80 mA,能使用UART、PWM、GPIO端口与单片机通信,安全机制可选WPA/WPA2。如图3所示WiFi的客户端与无线访问接入点(AP)之间的连接需要经过“四次握手”。
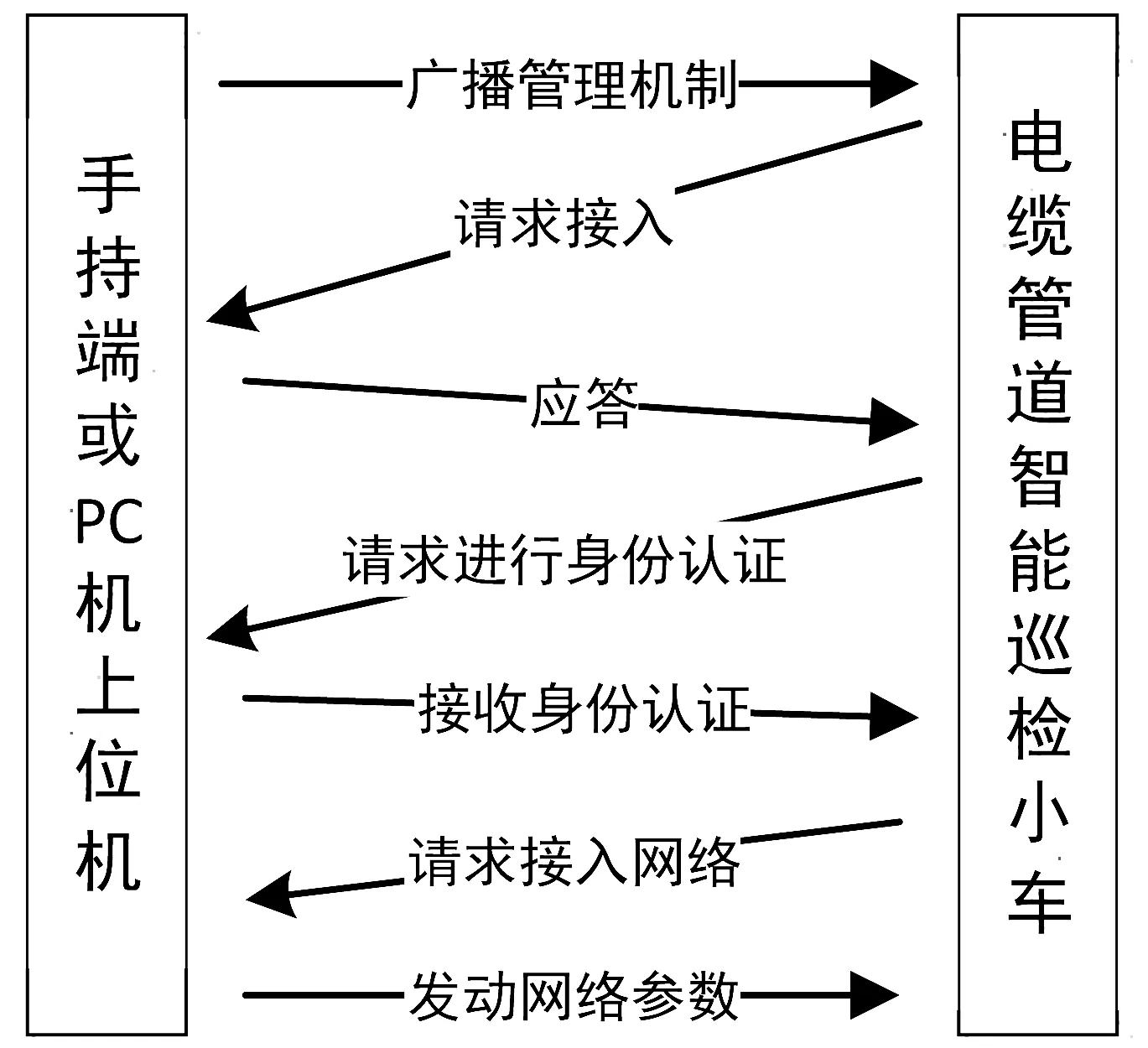
图3 上位机与下位机通讯过程
2.4 电源模块
本文使用聚合物锂电池供电,锂离子电池由于其可重复充放电、工作温度广、容量大的特性,适合用于本设计。单块锂电池电压上限为4.2 V,电压下限为2.4 V。虽然锂电池能放电到2.4 V,但实际使用中禁止放电到如此低的电压,经过测试,锂电池从4.2 V到3.0 V区间内,所释放的能量占电池总容量的97%左右,所以电池使用不应低于2.4 V电压。锂电池会出现自放电现象,即使不使用,它的电压还是会在一个较长的时间内自动下降,因此,长时间闲置的锂电池需要定期进行保养性充电。综上,3.0 V是一个理想的放电截止电压。在实际使用时,放电到3.7 V时,电池内能量就会消耗掉80%。此时的电压可作为电池电量的20%警戒线,一般来说,使用到剩余20%电量就停止使用,有利于延长锂电池使用寿命。过度充电(指充电到4.2 V以上)和过度放电都会对锂电池本身产生不可逆的损害,导致锂原子在电芯材料表面产生树枝状结晶,结晶生长到一定程度会刺破电芯正负极间的隔膜,电池因此短路,甚至可能发生爆炸。由于锂电池电压与其剩余容量相关的特性,可以通过测量电池两极的电压,由电源电压即可推算出电池剩余容量。锂电池剩余电量与锂电池电压关系如图4所示。由于锂电池在以不同的电流放电时的电压会出现波动,所以直接测量电压求出当前剩余电量并不准确。在大电流设备用电时这种方法会出现剩余电量快速下降,停用大电流设备后电量又升高的现象。更准确的方法是使用库仑计测量电池当前的电流和电压信息,通过电池总容量减去电流电压的时间积分得出准确的电量信息。
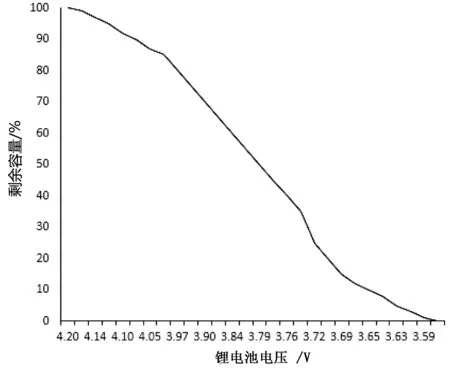
图4 锂电池电量与其电压的关系曲线
由锂电池直接引出的电压并不能直接供给单片机使用。单片机的使用电压为3.3 V,单块锂电池输出电压为4.2 V。需要使用稳压模块对电源进行一定的处理,才能给单片机供电。本次设计中选择使用RT9161A-33GX低压差线性稳压芯片,如图5所示。通过使用此芯片,将来自锂电池的4.2~3.7 V电压稳压到3.3 V。然后在稳压模块的两端分别并联一个电容,用于输入滤波和输出滤波。
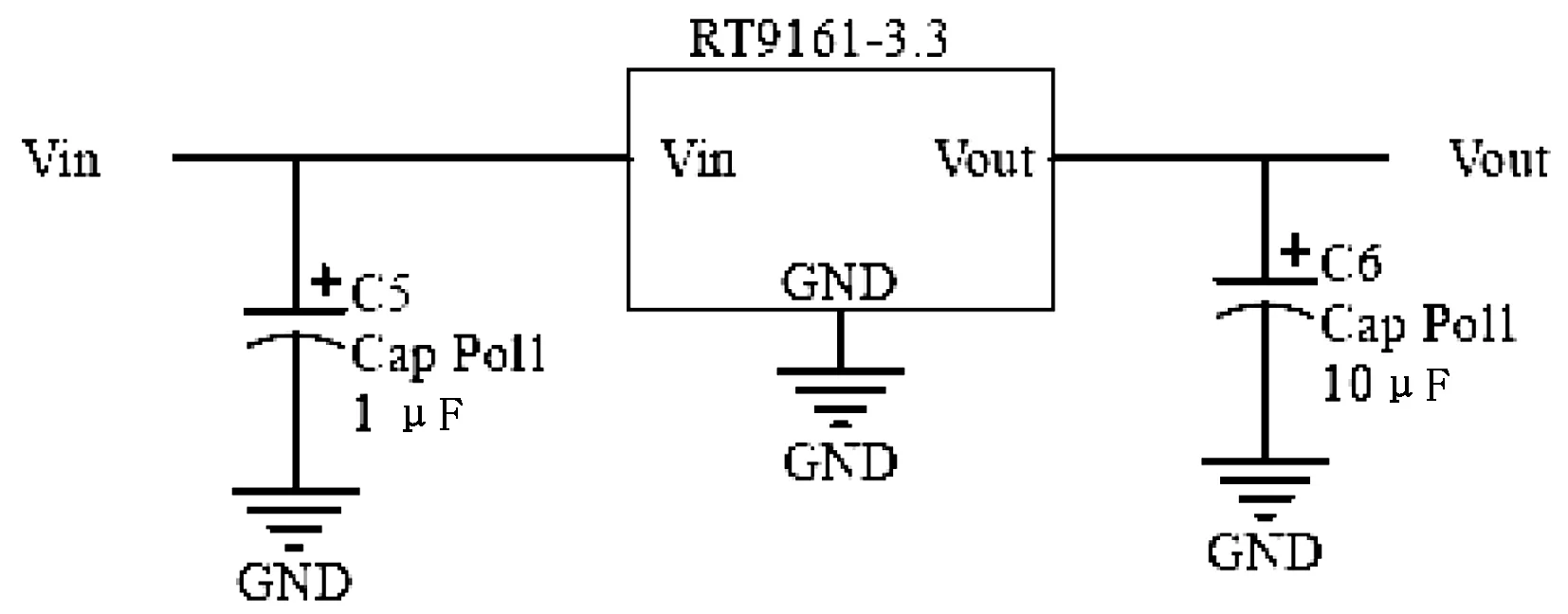
图5 稳压模块
2.5 直流有刷电机换向电路
不同于步进电机或无刷电机,直流有刷电机只有两个供电引脚,在需要换向时通过调换两个引脚的输入才能达到换向的功能。调换引脚的输入在机械电路上容易实现,通过电磁继电器可以实现,但在电子电路中,由于电路不可移动,调换输入输出比较困难,故此需要设计电路以电子元件实现输入反转。如图6所示,通过一个H桥电路,控制电机两极的三极管即可实现控制输入反转,但传统直接控制需要使用到4个GPIO口,比较浪费单片机端口。改进后的电路把上下桥臂连接在一起,只需要使用两个GPIO口就可实现使用单片机串口控制直流有刷电机的正转和反转。需要注意的是,Q1与Q2、Q3与Q4不能同时接通,否则会因为电流过大而烧毁三极管。假设电流从左到右经过电机为电机正转方向,此时,PB14置高电平,PB15置低电平,使三极管Q1和Q4同时导通,Q2与Q3同时截止即可实现电机正转。当需要电机反转时,PB15与PB14两个引脚的电平倒置,使三极管Q2和Q3同时导通,Q1与Q4同时截止,此时电机就会反向转动。

图6 直流有刷电机换向电路
2.6 照明模块
照明模块由白光LED并联组成,由3.3 V供电,提供管道内照明。照明模块使用机械开关与单片机的Vcc直接相连。如图7所示。
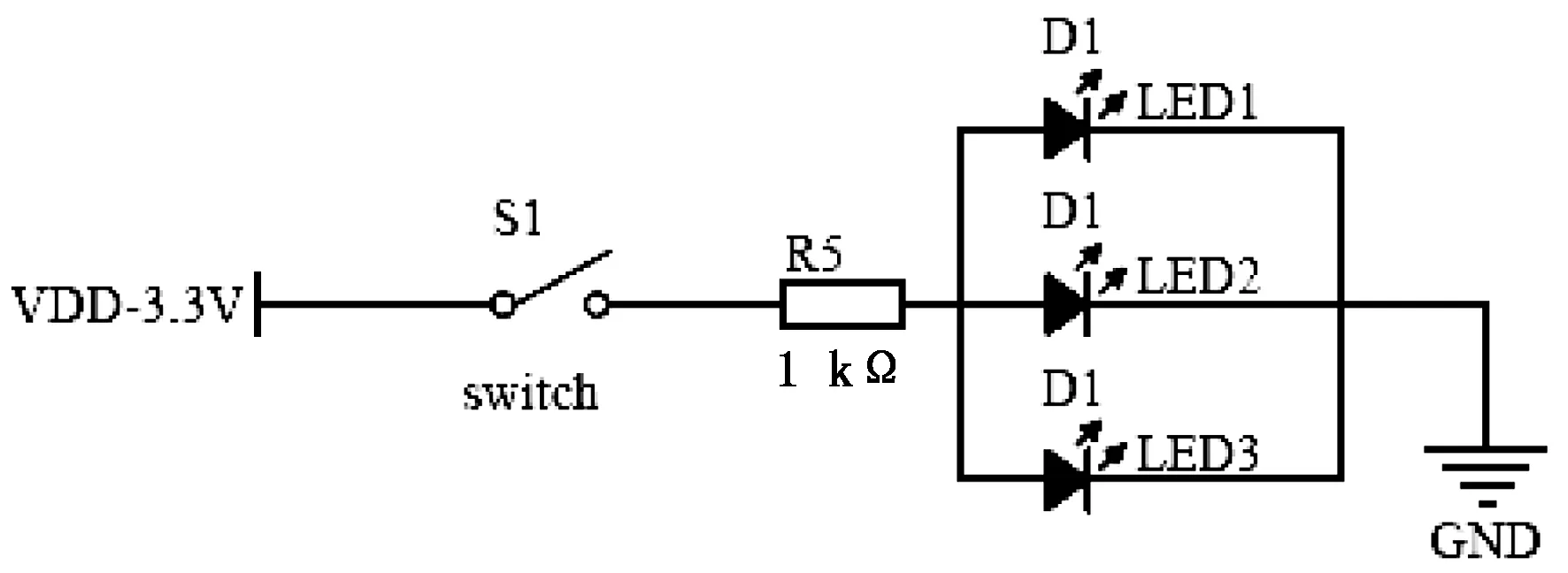
图7 LED照明电路
3 软件设计
3.1 上位机设计
如图8所示,本系统的上位机使用C#语言开发。本系统上位机界面主要由视频显示界面与操作界面组成,视频界面用于接收图像信息,操作界面用于实现操作按钮、显示操作信息。同时,为了连接下位机,该上位机能通过设置网络端口,与连接了本机WiFi的下位机进行端口匹配。

图8 上位机
3.2 下位机设计
如图9所示,开机后,系统会先进行自检,检测摄像头是否在线,若不在线则输出无摄像头的字符串,若有则继续运行接下来的程序。自检后,单片机开启ESP8266模块,根据预设的信息自动搜索上位机的WiFi信号,找到对应名称与密码的上位机后,单片机开始连接上位机,并查找并连接上位机中的服务器端口。当系统与上位机连接成功后,系统会自动向上位机传输图像。在完成连接的系统中,若在程序执行时,上位机传入运动命令,则会触发中断,单片机开始执行上位机的命令,直到命令结束。考虑到一直处于中断状态会导致图像显示卡顿,系统的行走命令由两段进行,接收到前进指令后先打开并保持电机电源,然后每隔一个很小的时间会重复检测这一命令,若上位机没有继续传入前进命令则关闭电机电源。由于单片机时钟频率很高,处理指令快,这样处理中断指令并不会造成视频传输的卡顿。
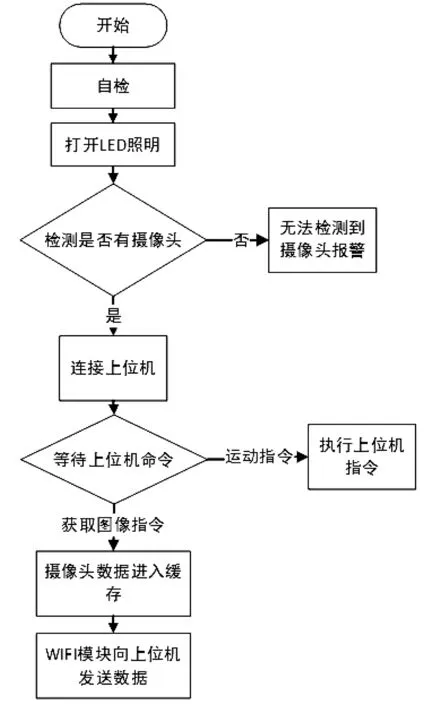
图9 下位机程序流程
4 实物搭建与实验测试
搭建实物模型如图10所示,本智能巡检小车可以在ϕ150 mm、ϕ160 mm、ϕ200 mm等几种不同的电缆排管环境下工作。小车经过多次爬坡实验、越障实验、管道行走实验,证明该系统能够稳定运行。通过对成品的测试,续航时间大于或等于30 min,爬坡角度大于或等于10°,有效通信距离大于或等于40 m,图像传输速度大于15帧/秒。
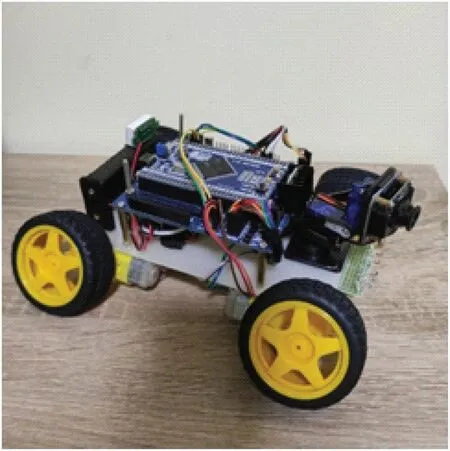
图10 电缆管道智能巡检小车实物
5 结束语
随着中国的发展,用电量大幅提高,城市电缆敷设量迅速增加,同时也带来了大量的巡检工作,增加电力巡检人员的负担。电缆备用排管的巡检难度较大,本文针对此问题设计了一种智能巡检小车,主要由STM32最小系统、照明模块、运动模块、上位机几个部分构成,实现了对电缆排管内部图像的实时监测。经过测试,该系统能够稳定运行。由于电缆排管内部无照明,因此摄像头模块针对该环境进行了一定调节,保证图像质量。上位机使用C#语言开发,用于接收单片机传输的图像与控制下位机的运动。该系统能够使用在闲置管道施工前的检测中,大幅度提高施工人员对管道内情况的掌握程度,有效减少施工前准备时间,有利于电缆穿管施工。
